Ползающий CD-привод
Привет, Хабр. В этой статье я расскажу о простом управляемом ползающем роботе, сделанном из старого CD-привода. Я хочу донести лишь идею, а не конкретную конструкцию, так что каждый при желании сможет сделать что-то подобное из имеющихся деталей. В статье много лёгких картинок и три гифки суммарно на 25 Мбайт.
Если кто-то больше любит смотреть видео, то вот видео про этого робота.
Многие любители электроники задумываются о том, что можно сделать из устаревших в наше время приводов компакт дисков. Самое распространённое применение это лазерный гравер из лазерной головки пишущего DVD и координатный столик из двух подвижек от этой головки. Из выдвижного столика для диска обычно делают автоматические дверцы (например, для кошек или хомяков). Я же из выдвижного столика сделал две игрушки: «бесполезную машину» и ползающего робота. Про бесполезную машину я рассказывать не буду, поскольку она очень простая. Кому интересно, можете посмотреть про неё видео.
Впрочем, идея ползающего робота тоже весьма простая. Если кто-то не знаком с конструкцией CD-привода, можете почитать о нём в Википедии.
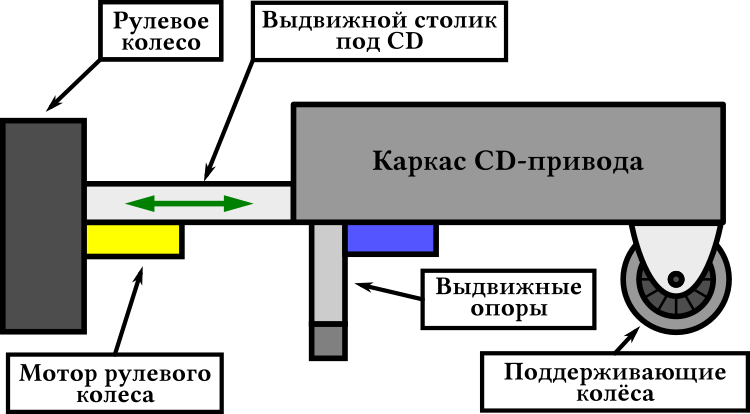
Начну с теоретического описания. На рисунке ниже показан ползающий CD-привод сбоку. У него сзади имеются два свободно вращающихся колеса, названные «поддерживающие колёса». Спереди имеется «рулевое колесо» со своим мотором. Снизу есть две выдвижные опоры для поднятия рулевого колеса.
На следующем рисунке вид спереди, правда, он получился мало понятный.

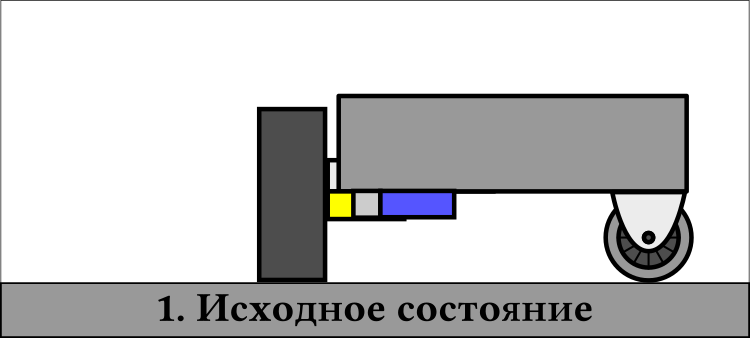
Как эта система ползает тоже покажу на рисунках. Итак, есть исходное состояние, когда выдвижной столик от CD и опоры задвинуты. Из этого положения робот начинает двигаться вперёд, назад и выполняет поворот.
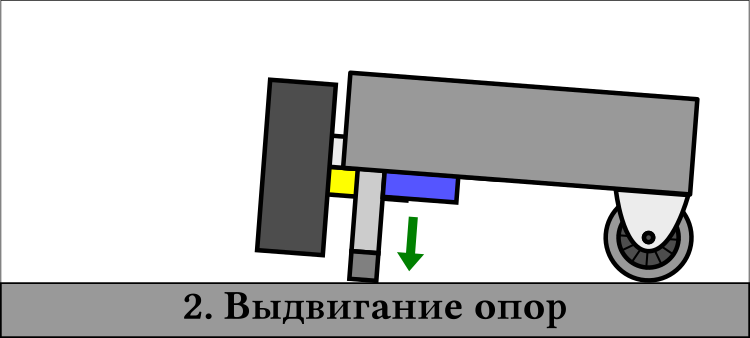
Для движения вперёд сначала выдвигаются опоры, тем самым поднимается рулевое колесо.
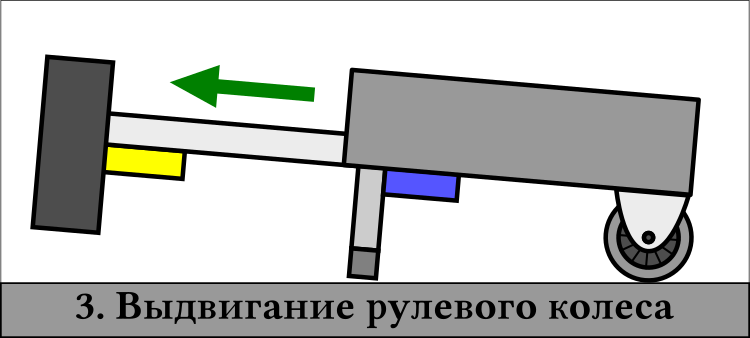
Затем выдвигается столик для CD вместе с рулевым колесом.
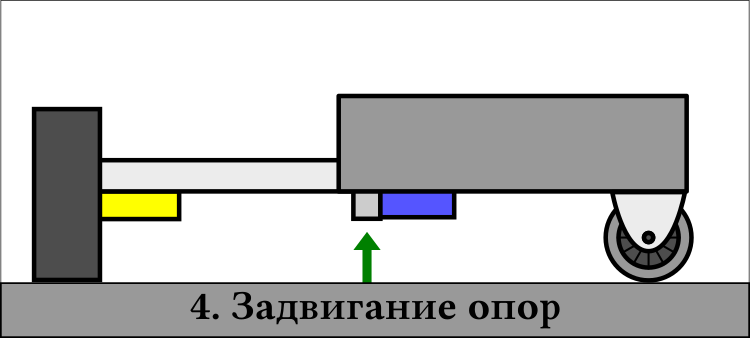
Далее опоры задвигаются и рулевое колесо опускается.
Теперь остаётся вернутся в исходное состояние путём задвигания столика для CD.
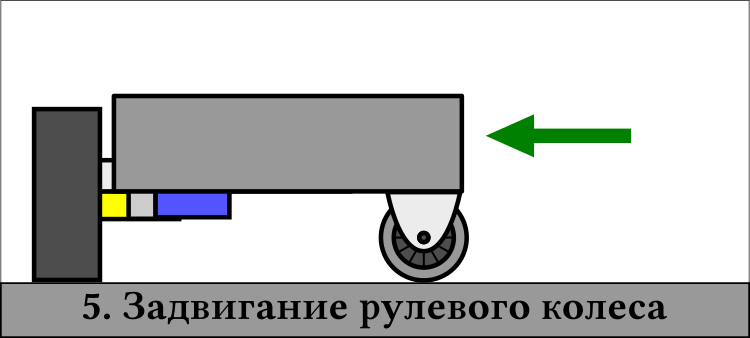
При этом рулевое колесо цепляется за поверхность пола, поэтому весь каркас CD-привода подтягивается к рулевому колесу. Далее цикл повторяется.
Для поворота робота в исходном состоянии включается мотор рулевого колеса, при этом вся система начинает поворачиваться на 360 градусов вокруг оси, находящейся где-то между поддерживающих колёс.
Если вы поняли, как работает эта штуковина, то вам не составит труда представить, как выполняется движение назад.
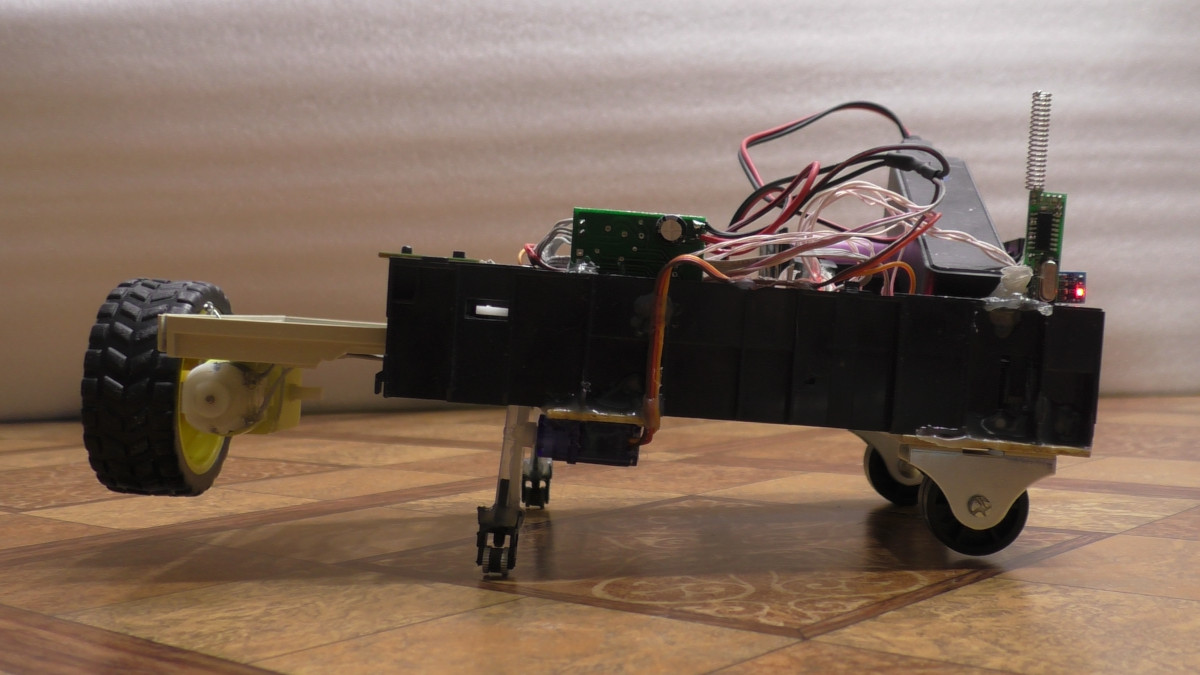
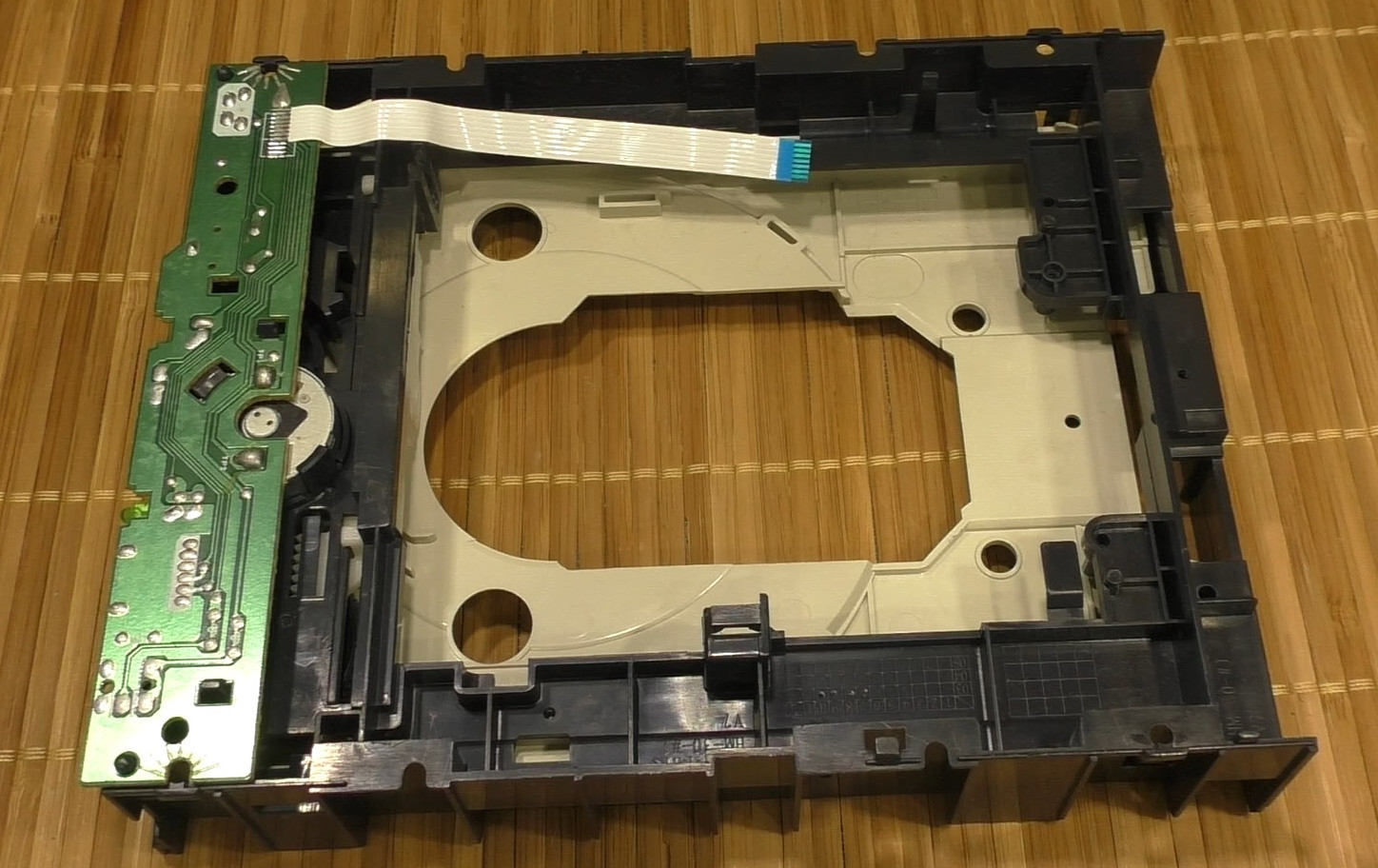
Теперь немного о моей реализации. Детально я не буду рассказывать, так как сделано всё кое-как, только ради проверки работоспособности идеи. В качестве базы использовал простой CD-привод, вынул из него всю оптику с подвижкой, остался только пластиковый каркас с выдвижным столиком, мотором и кнопками-концевиками для столика.
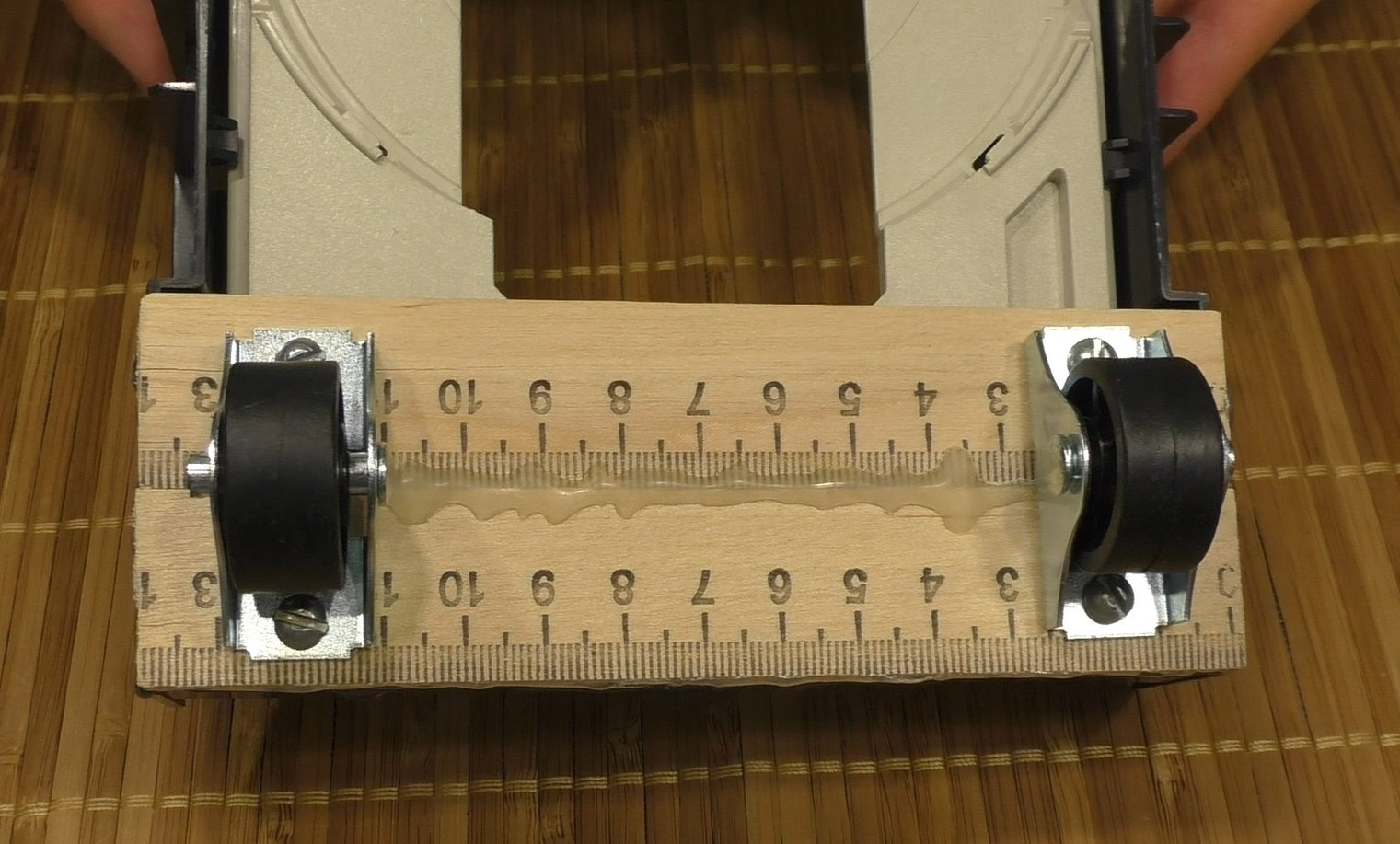
В качестве поддерживающих колёс прикрепил мебельные ролики.
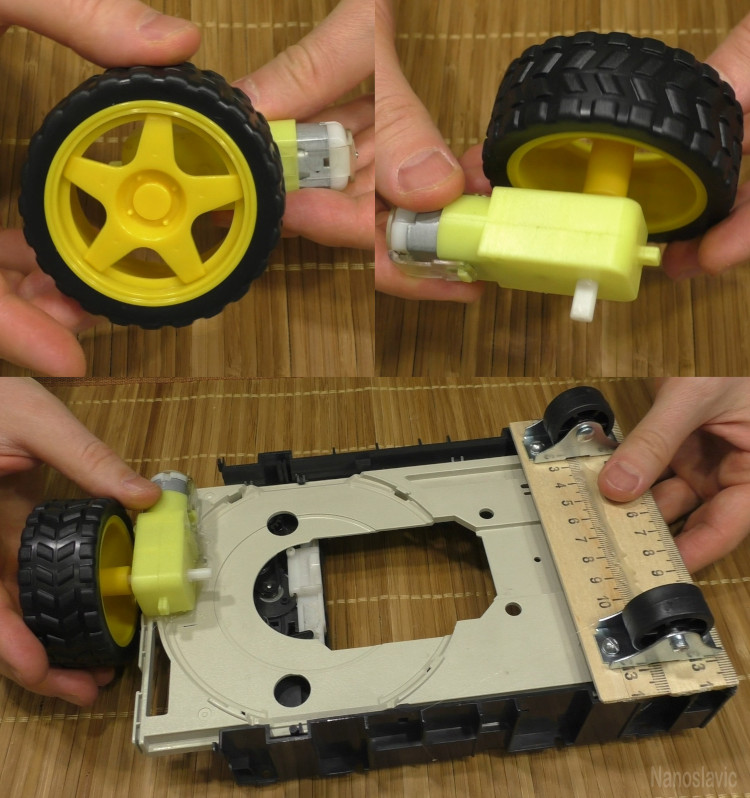
Рулевое колесо покупал отдельно где-то в интернете. У него есть мотор и пластиковый редуктор.
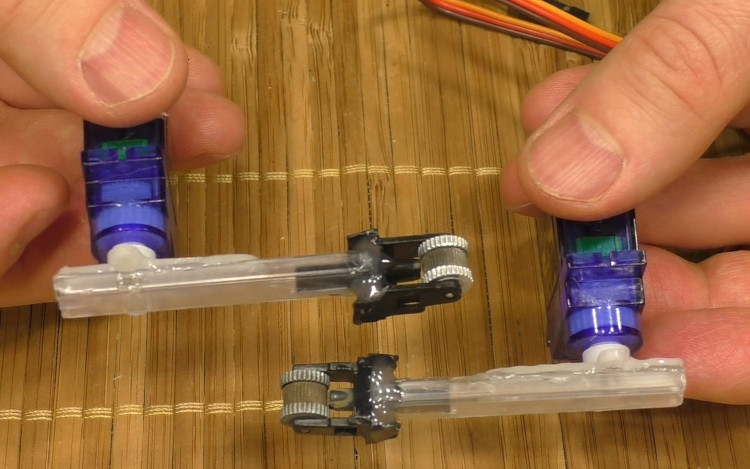
Выдвижные опоры сделал из пластиковых трубок, в которых продаются оптом микросхемы в корпусе SO8. К ним приделал кресало от зажигалок, предварительно вынув из них кремень и пружинку, чтобы кресало свободно вращалось. Для выдвигания опор использовал две дешёвые сервомашинки. Всё собрано, в основном, на термоклее.
Электроника делалась из того, что было, поэтому она очень не оптимальна. Для управления моторами столика CD и рулевого колеса использовалась мостовая схема на транзисторах. Это позволило менять направление вращения. В качестве логики — какая-то плата ардуино. Для управления движением взял радиобрелок и ответную схему приёмника на частоту 434 МГц.

Для питания моторов соединил последовательно три литий-ионных аккумулятора без всякой защиты, поэтому включал с осторожностью, проверяя иногда их заряд. Для питания цифровой части и радиоприёмника использовал маленький дешёвый повербанк, выдающий 5 В.
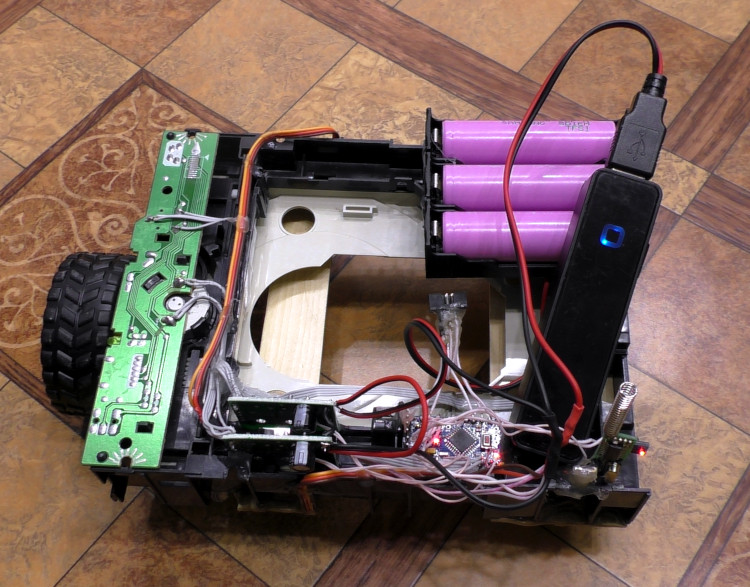
Батареи в задней части очень кстати, так как рулевое колесо сильно перевешивает при выдвигании вперёд.
Управляющая программа при включении проверяет концевики выдвижного столика CD и приводит систему в исходное состояние. Для управления используется 4 кнопки. При нажатии на кнопку «Вперёд» начинается движение вперёд. Остановка и возврат в исходное состояние системы происходит при нажатии на любую кнопку пульта. При нажатии кнопки «Назад», выполняется движение назад, также с остановкой при нажатии на любую кнопку. Кнопки «Влево» и «Вправо» работают только в исходном состоянии и только пока они нажаты.
В итоге оказалось, что нормально работает только движение вперёд. При движении назад сильно смещается центр тяжести при выдвигании рулевого колеса, поэтому опоры не могут нормально поднять его. Нужны более мощные сервомашинки. Поскольку система всегда возвращается в исходное состояние, то движение возможно только «шагами», определяемыми длиной столика для CD, но это чисто программное ограничение.
И напоследок, немного гифок.


Я думаю, что всю систему можно упростить, сделав пульт управления на шлейфе, а управление моторами выполнять кнопками и переключателями. Для управления сервомашинками можно сделать простой генератор на таймерах 555. Питание можно сделать из обычных батареек и разместить их в пульте, снизив вес робота. Такой пульт позволит управлять роботом полностью в ручную.
Всем спасибо за внимание и удачных вам поделок.
