Похоже, я не предприниматель
Я запустил и возглавил крутой робототехнический стартап, который мне удалось довести до первых продаж. Насколько мне известно, мы продвинулись дальше, чем любой другой аналогичный российский проект, но, около двух месяцев назад, я покинул его, передав управление команде, и сейчас никак с ним не связан.
В этой статье я хотел бы
— поделиться сделанными выводами
— порекомендовать проект, если вы хотите присоединиться к нему в качестве разработчика/инвестора
— выложить техническую документацию, если вы захотите сделать форк

Для начала — немного о том, чем мы занимались.
Целью проекта было создать дешевого универсального робота, имеющего возможности сопоставимые с человеческой рукой. Аналогичные скорость, грузоподъемность, точность — и по цене в десять раз ниже, чем у современных промышленных роботов.
Сейчас существуют два основных направления, в которых развиваются роботы-манипуляторы.
Первое — роботы, которые имеют малые размеры, 3–4 степени свободы, низкую точность, большие люфты и множество других ограничений, которые делают невозможным их использование для замены человеческого труда. Их назначение — игрушка для гиков или исследовательские проекты. Их производители вынуждены балансировать между технической сложностью конструкции, достаточной для удовлетворения любопытства покупателей, и ее ценой.
Второе направление — промышленная робототехника, которая широко используется, например, в автомобильном производстве для сборки, сварки и покраски деталей. Это роботы, которые имеют совершенно потрясающие характеристики (например, повторяемость — 0,05 мм), абсолютно недоступные человеку. Такие роботы могут использоваться для выполнения операций со скоростью и точностью, которые принципиально не могут быть достигнуты при использовании ручного труда. Также, за счет долгого времени жизни и при условии малого числа перерывов в работе, они могут оказываться дешевле, чем человек, выполняющий аналогичные функции.
Между этими двумя группами есть разрыв по цене на два порядка (10k-1m RUR) и, менее впечатляющей, но все равно существенный, разрыв по характеристикам. Именно в нишу находящуюся между этими двумя группами мы и целились.
Существуют огромные рынки, на которых используется ручной труд, и единственная причина этого — в том, что люди дешевле, чем аналогичная по функциям группа промышленных роботов. Примером может служить приготовление еды в фастфудах. Эта деятельность, которую легко прописать в виде алгоритма, в ней не нужна высокая точность или скорость. Если на рынке окажется робот со стоимостью равной нескольким месячным окладам неквалифицированного рабочего, и способностью выполнять хотя бы половину его работы, он окажется востребованным.
Отталкиваясь от этих предпосылок, мы определили целевые технические характеристики и дальше выбирали решения, которые позволяют их достичь при минимальной цене. Нам требовался робот с шестью степенями свободы (минимальное количество для того, чтобы иметь возможность передать любое движение), грузоподъемностью в 3 — 5 килограмм, повторяемостью движений (под нагрузкой и без) в районе 1–2 миллиметров, физическими размерами и скоростью сопоставимой с рукой человека. Целевая стоимость — около 150k RUR.
Если кратко — мы достигли этих целей. С некоторыми оговорками и в ограниченном количестве ситуаций, но у нас были результаты, позволяющие говорить, что мы на правильном пути.
Робот был протестирован в реальных условиях — летом в течение, примерно, трех месяцев он работал на выставке «Бал роботов», собирая на стенде макет бургера.
Затем, на основе полученных данных, мы исправили ошибки, провели модернизацию и недавно робот вернулся на выставку, где сейчас занимается тем же.
Также мы доказали, что на робота есть спрос — лендинговая страница с минимальной рекламой позволяла получать множество звонков и несколько запросов о покупке в неделю, чего вполне достаточно для старта продаж.
-----------------------------------
И, тем не менее, я принял решение выйти из проекта.
Это было сложное решение, с учетом вложенных усилий и наглядности полученного результата, но я понял, что путь, который пришлось пройти, практически никогда не приносил мне удовольствия. Каждый следующий шаг давался столь же тяжело, как и предыдущий, и чем больше был пройденный путь, тем длинней казался будущий.
Для выхода было несколько причин, которые можно изобразить одной картинкой
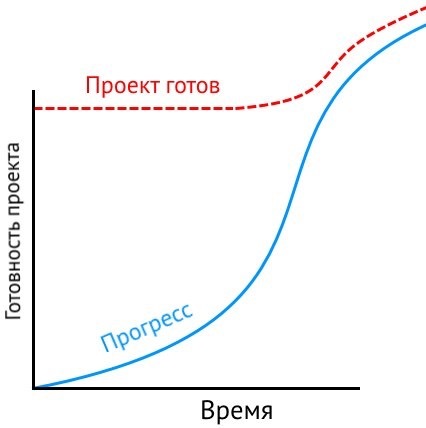
Но если детализировать, то:
— Сроки затягиваются. Широко известно как надо оценивать сроки выполнения технически сложного проекта, который ты делаешь впервые: возьми самую негативную оценку по времени, куда включены все возможные проблемы. А потом умножь ее на три. К сожалению, это правда.
— Видение меняется. Представление о том, что нужно заказчикам, значительно отличаются в начале разработки и в конце. Дело не только в том, что сформулировать некоторые требования потенциальный заказчик может только увидев работающий прототип, а удовлетворение этих требований, зачастую, требует значительных изменений. Некоторые технические аспекты (например, надежность) начинают выходить на первый план только после того, как прототип готов и начинаются его тесты в реальных условиях.
— Та стадия, которая раньше казалась стадией запуска продаж, теперь выглядит как промежуточный шаг. В каком-то смысле это продолжение предыдущего пункта. Недостаточно получить прототип, который работает «как надо». Проблемы той же надежности требуют существенных доработок конструкции, которые не влияют, на функциональные характеристики, но отнимают много времени, денег и ведут к повышению цены продукции. Причем почти никогда нет уверенности, что некоторая проблема решена один раз и навсегда — зачастую это можно понять только по статистике отказов, которую лучше набирать на дружественной близкорасположенной площадке, что очень сильно сужает спектр возможных заказчиков и, как следствие, отодвигает сроки выхода на самоокупаемость.
— Существенное ускорение работ может быть достигнуто только увеличением финансирования. При этом даты выхода на самоокупаемость сдвигаются все дальше в будущее.
Все перечисленные проблемы могут быть вызваны разными причинами, например:
1. Ошибки при руководстве проектом (Частично. Но те которые я вижу сейчас, не были для проекта смертельны)
2. Неудачно подобранная команда (Определенно нет)
3. Недостаточная гибкость (Частично. Мы слишком поздно начали развивать дополнительное направление (производство редукторов), которое позволяет сейчас проекту выживать где-то на границе самоокупаемости)
4. Несоответствие масштабов проекта выделенным на него ресурсам (Полагаю, что основное)
Выводы, которые я сделал за время проекта:
— Позаботьтесь о действительно стабильном финансировании или постарайтесь как можно быстрее перестать от него зависеть. Если вы делаете проект в первый раз, какой бы ни был бюджет — вы в него не уложитесь. В нашем случае, источником денег были зарплаты, получаемые сооснователями на основном месте работы. Это позволило развивать проект без оглядки на внешние факторы
— Дедлайны важны. Однозначно определите цель и штрафные санкции в случае ее недостижения, это стимулирет к более эффективной работе. Жесткость санкций не должна убивать после первого же срабатывания, но последовательность сорванных дедлайнов является серьезным признаком, что что-то не так с постановкой целей или контролем за их выполнением
— Команда важнее цели. Даже при ошибочных начальных предпосылках, гибкость, даваемая сильной командой, позволяет видеть альтернативы и менять направление движения без серьезных негативных последствий
-----------------------------------
Несмотря на мой выход из проекта, я испытываю чувство ответственности за проделанную работу, и хочу, чтобы сделанное нашими инженерами помогло как можно большему количеству людей. По согласованию с людьми о ставшимися в проекте, я выкладываю техническую документацию, которая может помочь вам составить собственное мнение о нем.
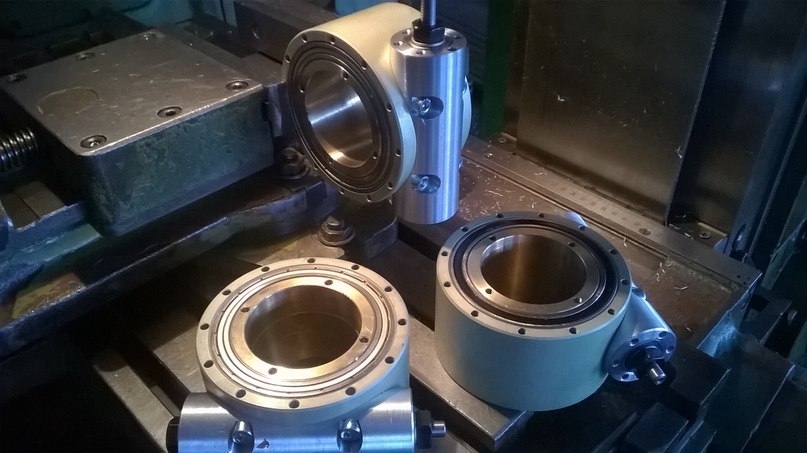
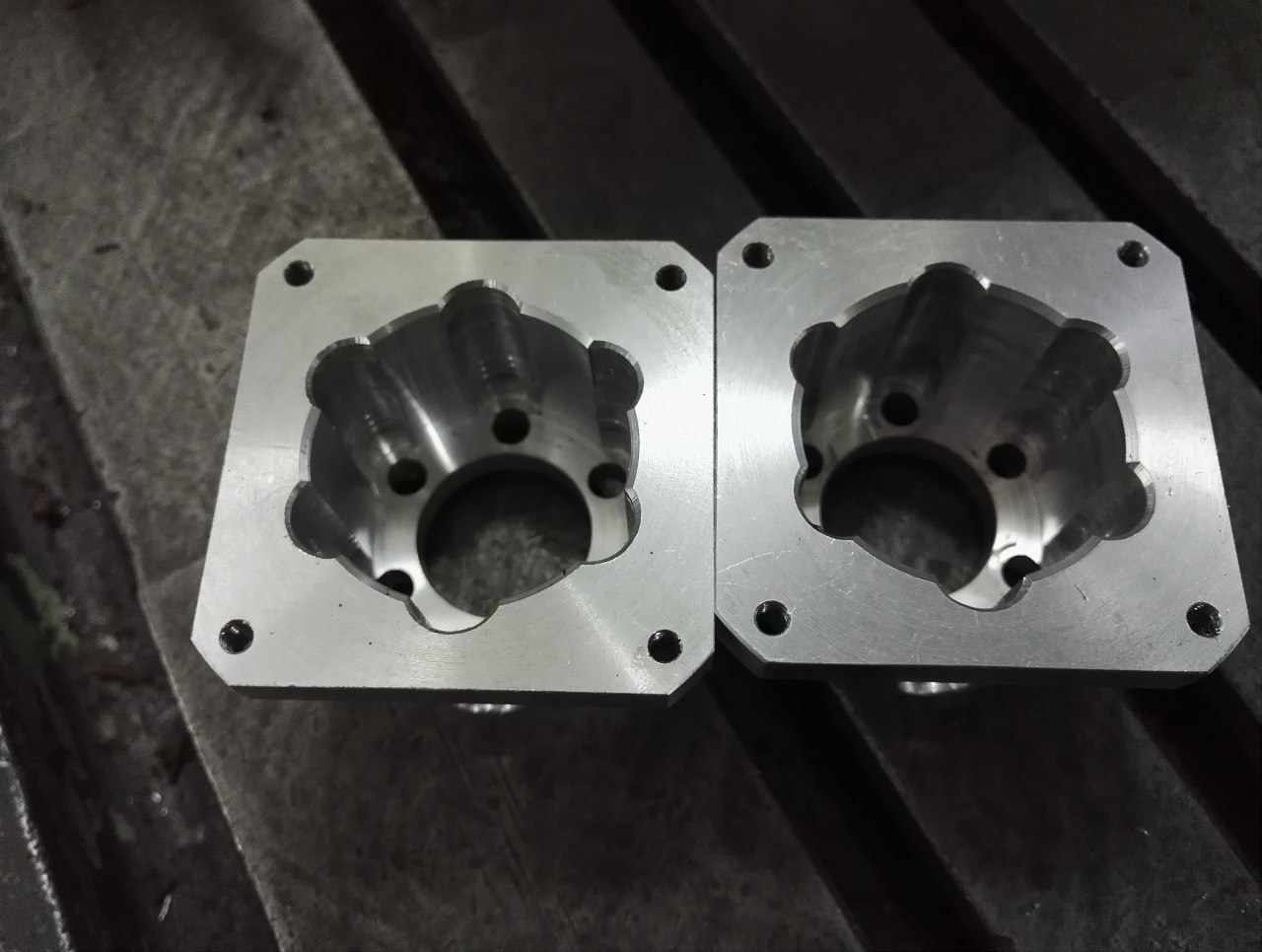
Все механические детали робота были спроектированы и изготовлены нами самостоятельно. Это позволяло экспериментировать с конструкцией, но значительно увеличило сроки разработки.


Было, как минимум, три особенности не характерных для других робототехнических проектов:
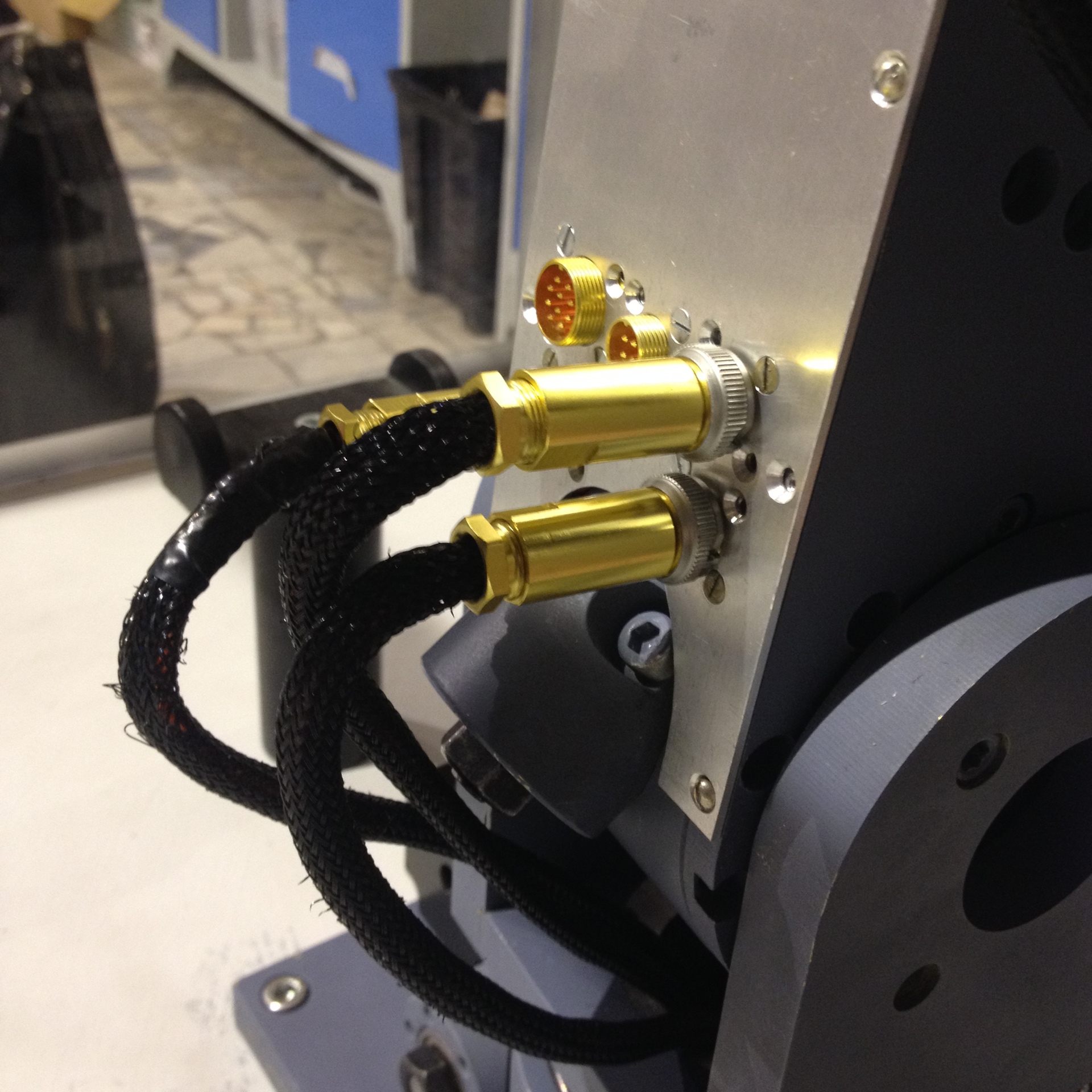
1. Шаговые двигатели вместо сервоприводов
2. Червячные редукторы вместо планетарно-цевочных или волновых
3. Практически полное отсутствие обратной связи
Использованные вместе, эти доработки позволили значительно снизить себестоимость конструкции.
Червячные редукторы, традиционно, считаются недостаточно точными для робототехники, но в случае изготовления на хорошем оборудовании и использования некоторых трюков (вроде выборки люфта сближением осей), они позволяют получить вполне достаточные для наших целей характеристики. Вместе с тем, червячные редукторы очень дешевы. В случае массового изготовления они почти на порядок дешевле редукторов используемых традиционно в робототехнике. Кроме того, они обладают одним крайне полезным свойством — даже значительная нагрузка на выходную ось не приводят к прокручиванию входной оси. Это позволяет снять проблему ударных нагрузок — они не передаются на ось двигателя, а при выключении питания робот гарантированно остается неподвижным.
Шаговые двигатели позволяют отказаться от дорогостоящих энкодеров. В каждый момент времени робот «не знает» где он расположен. У него есть только концевые датчики — что позволяет автоматически выходить в крайние положения по каждой из осей. Однако зная начальное положение и число сделанных шагов можно точно рассчитать текущее положение. Минусом данного подхода является проблема неотслеживаемого пропуска шагов, характерная для шаговых двигателей. Однако если соблюдать нагрузки, плавно разгонять/тормозить двигатель, проблем можно практически избежать. Те пропуски шагов, которые все-таки возникают, обычно не существенны в рамках одного цикла. Возврат в исходное положение (до срабатывания концевых датчиков) в конце каждого цикла работы позволяет избежать накопления ошибок.
По ссылке вы сможет найти 3D модель робота, чертежи, а также фото/видео, раскрывающие историю разработки. Я буду рад, если вы решите присоединиться к проекту (контакты команды — во вложенных файлах) или если захотите развить свою ветку той же конструкции.
Участие в хардверном проекте это захватывающий опыт, который, несмотря на свое решение, я рекомендую повторить всем. Попробуйте взять что-то, во что вы верите и попробовать превратить это в бизнес. Это было безумно интересно для меня и, надеюсь, будет столь же интересно вам.
Комментарии (2)
 klylex
klylex
14 апреля 2017 в 23:20
0↑
↓
Это точно в «Разработку»? Может «Управление»? giffok
giffok
14 апреля 2017 в 23:22 (комментарий был изменён)
+1↑
↓
Возможно. Я колебался между ними и хотел отнести именно ко второй, но робототехника была только в «Разработке».
