Подводный GPS: продолжение
Сегодня я хочу немного рассказать что интересного произошло с момента публикации прошлой статьи, где я рассказывал, как мы втроем за год сделали подводный GPS.
Мы решили в реальном времени оценить расхождение нашего подводного GPS с GPS-ом настоящим. И даже не просто с GPS, а с комбинированными данными GPS/GLONASS. Если интересно что у нас получилось — добро пожаловать под кат!
В общем, мы это как-то уже проверяли, но в хороших «морских» условиях. Теперь же возникла мысль проверить все фактически в луже.
Тут я должен пояснить, что для всякой гидроакустики мелководные водоемы считаются (и не зря) самыми сложными. Некоторые производители вообще не работают на мелкой воде, мол там ужасный приповерхностный слой с растворенным газом и множественные переотражения, и пр.
В общем, недалеко от нас есть чудесная лужа
Вот так она выглядит с берега:

Максимальная глубина в ней примерно 2–2,5 м, то есть, более мелководный водоем, в котором может потребоваться навигация, представить себе сложно.
Специально для предстоящих экспериментов была закуплена китайская приманочная лодочка на радиоуправлении — идеальный вариант для наших целей: достаточно (иногда мне кажется, что даже слишком) тихоходное, вместительное плавсредство, легко допускающее различные модификации.
Вот так лодочка выглядела изначально:

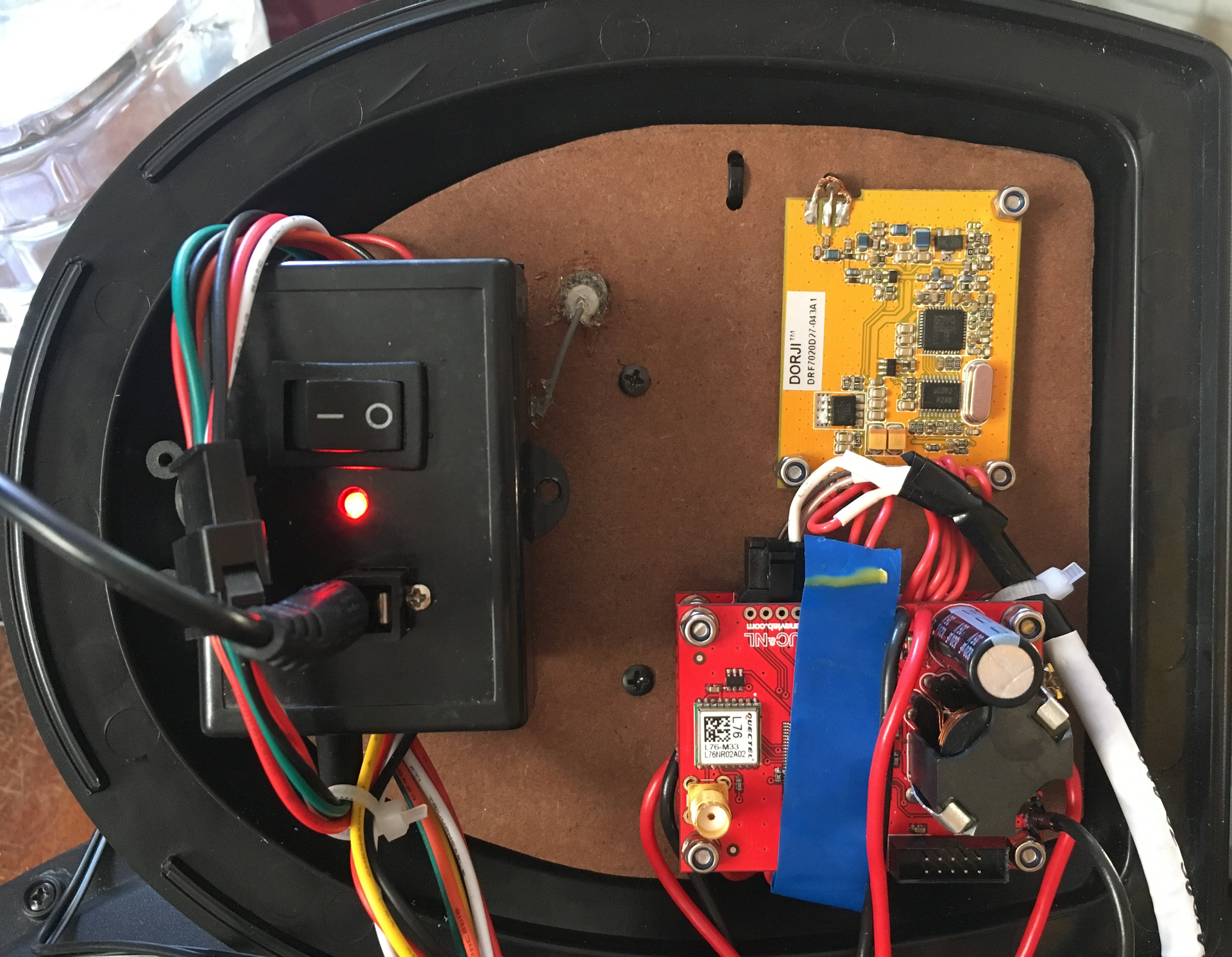
Затем мы осуществили ряд доработок. Родная электроника осталась почти вся и была лишь немного перемещена, за исключением механизма сброса приманки — за ненадобностью он был полностью демонтирован.
Дополнительно на лодку установили:
- плату с GPS/GLONASS приемником собственной разработки (на фото не видна — под оргалитовой панелью);
- 433 МГц радиомодуль DORJI + антенну к нему;
- нашу плату с процессором, который парсит выходные данные от GPS-модуля, акустического навигационного приемника и отсылает все это дело по радиоканалу;
- дополнительный свинцовый аккумулятор на 1,5 А*ч от которого питаются все наши потребители;
- зарядный разъем Bulgin Bucaneer для него;
- тумблер с резиновым колпачком (как на наших буях), включающий все наши системы;
- пара простых кабельных вводов через которые внутрь лодки заводится кабель навигационного приемника RedNODE и выводится кабель акустического излучателя (используется в другом эксперименте).
На фото видна еще одна плата — это как раз из другого эксперимента.
Как я рассказывал в предыдущей статье, наш подводный GPS суть есть длиннобазовая навигационная система, и для его работы на водоеме нужно устанавливать четыре плавучих буя-ретранслятора спутникового навигационного сигнала.
Это основной минус длинной базы — на водоеме еще надо что-то там ставить, а значит нужна лодка.
Но в этот раз нам хотелось показать, как можно сделать все исключительно с берега.
Благо нас было четверо (да, нас больше не трое!), и по задумке каждый брал с собой по бую и выходил в свою точку на берегу пруда, где с берега ставил свой буй на веревочке (чтобы не уплыл — лодку то не брали).
Вот в моей точке (Буй №4) это выглядело примерно так:

На том берегу, где располагался я, были два удобных подхода. Моим двум коллегам на противоположном берегу повезло меньше — там просто достаточно пологий берег, заросший камышом, кое-где вытоптанным рыбаками. В итоге, как будет видно из расположения, буй №3 пришлось вынести вообще очень далеко от остальных просто потому что в том месте было достаточно сложно подойти к воде.
Скриншот ниже показывает как были расставлены (разложены) буи во время эксперимента:

Кстати, забегая вперед скажу, что координаты буев получены из навигационного приемника, а не измерены непосредственно на суше.
На фото очень хорошо видно, что левее условной линии межу буями №1 и №2 располагается отмель. Такая, что там пешком ходит цапля (ей там по колено примерно), которую сфотографировать в этот раз не получилось.
С моего поста противоположный берег выглядит, как на следующем фото, а человек, сидящий слева — наш, он держит на веревке буй №1.

На этом же фото видно и саму нашу лодочку в процессе плавания.
Вот так она выглядит в собранном виде рядом с одним из наших буев:

Кабели буев пришлось сделать покороче, притянув их к грузонесущей проушине буя нейлоновой стяжкой, иначе излучатель просто оказывался лежащим на илистом дне. В нормальном положении расстояние от кромки воды до акустического передатчика буя составляет 1.5 метра.
Также можно видеть, что акустический навигационный приемник крепится на достаточно длинном кабеле. Его длина составляет 1.5 метра, запомним это, в дальнейшем это позволит объяснить некоторые особенности полученных результатов.
Влияние свободно болтающегося цилиндра на движение лодки весьма существенно. Фактически, радиус поворота и без того составлявший неприличные метра 3–4 стал ужасающим: на спокойной воде для поворота нужно метров 10–15. Мои попытки держать лодчонку на курсе при легком боковом ветре будут видны на получившихся треках.
Кстати о треках. До проведения эксперимента не было 100% уверенности, что система в принципе адекватно заработает в таких условиях.
Но тем не менее, первую точку на экране я увидел практически через минуту после погружения приемника в воду.
Увидел я это на экране нашего технологического приложения, примерно вот так:
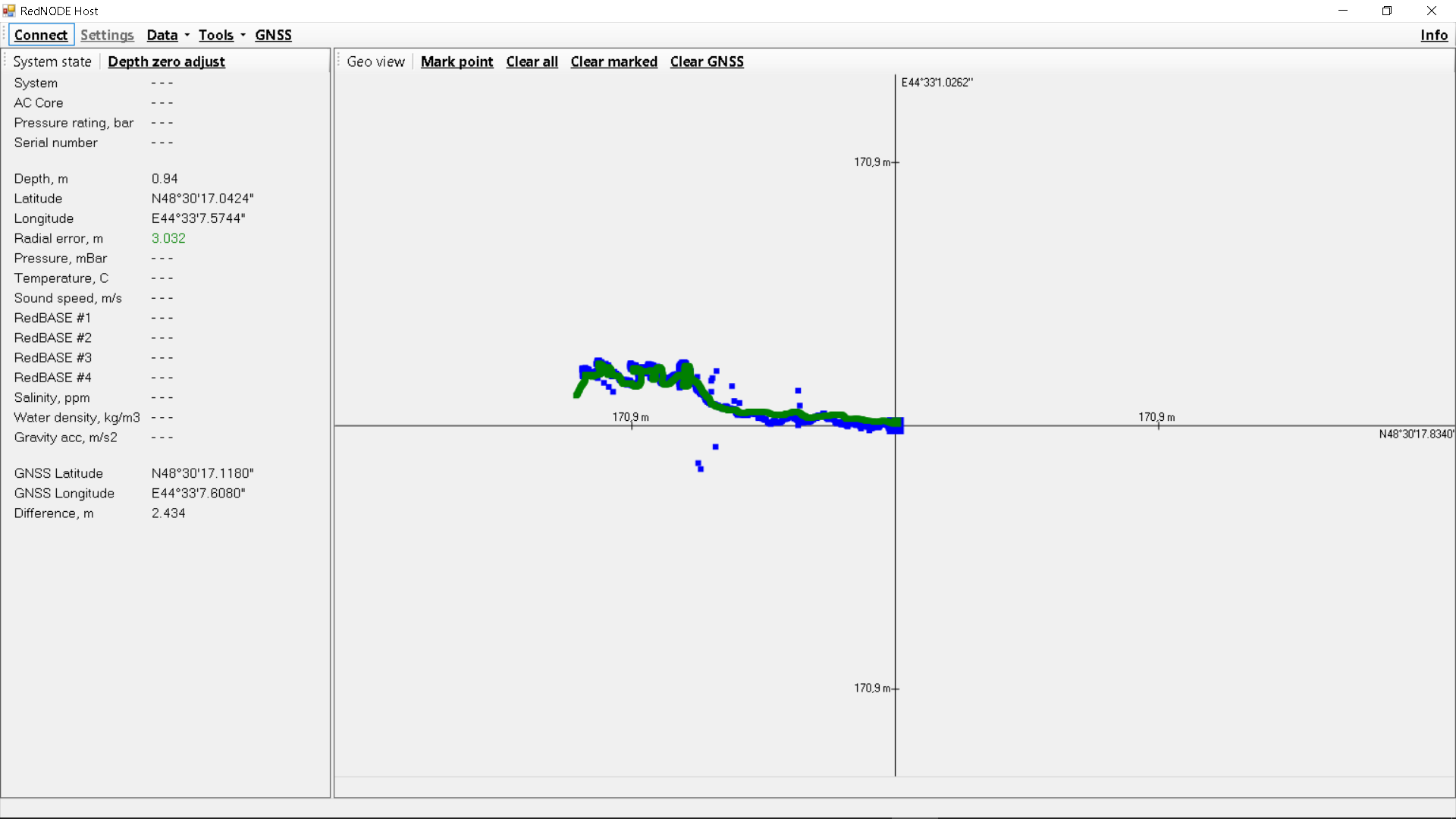
Трек с GPS/GLONASS-приемника отображается зеленым, а трек с акустического приемника — синим. В самой нижней строке на левой панели отображается значение разности в метрах между текущим показанием согласно GPS/GLONASS и акустической навигационной системы. Сразу скажу, что наспех собранный «комбайнер» данных выбирал только часть из той информации, что передает навигационный приемник и многие поля оставались пустыми.
Ну и наконец получившиеся треки во всей красе:
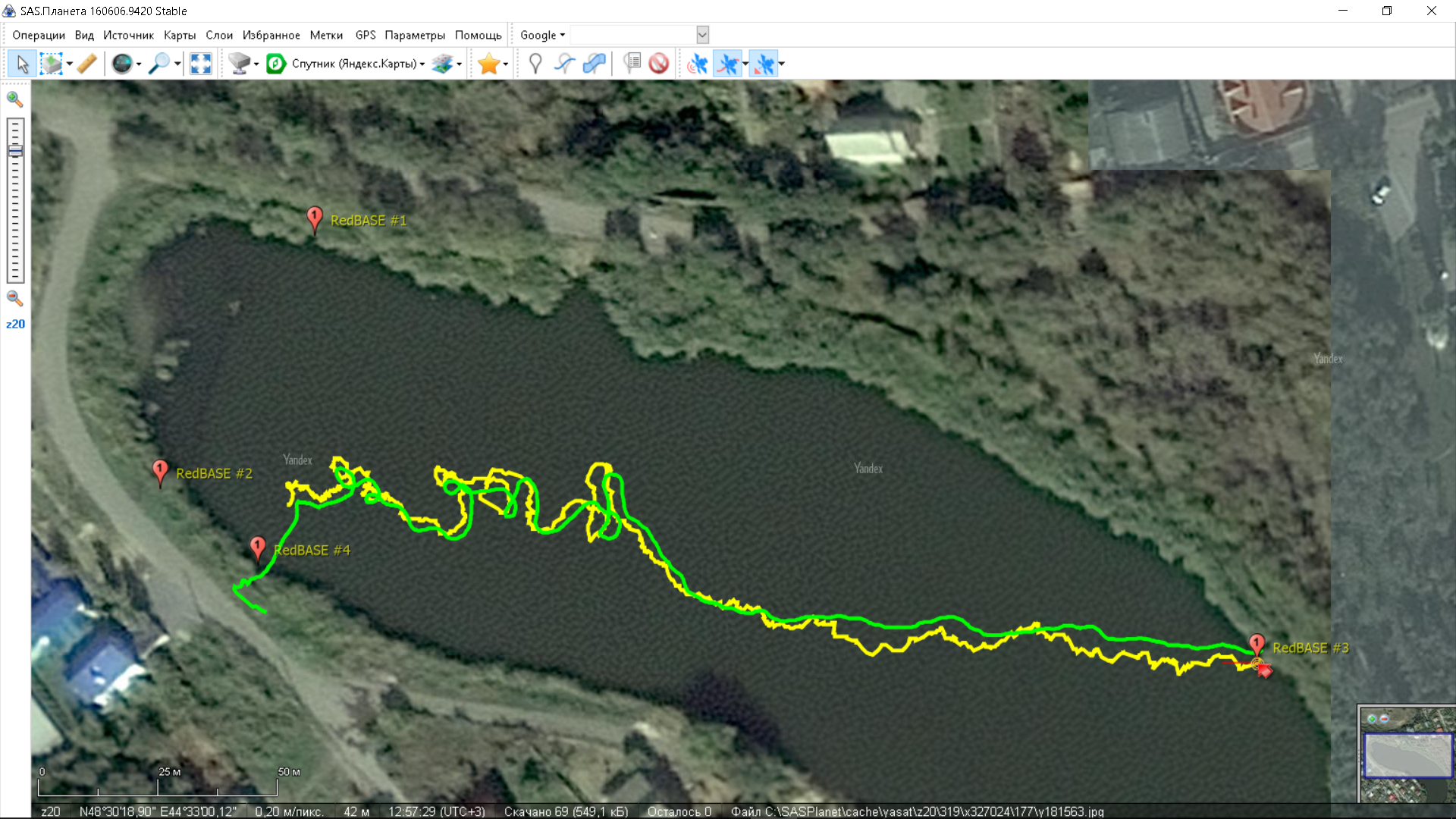
Максимальная разница между траекториями составляет в разных местах порядка 3 метров, что объясняется, во-первых, тем, что все-таки акустическая система в значительно большей степени подвержена влиянию движения позиционируемого объекта на точность вычисляемой позиции, просто потому, что между приемом сигналов от буев она успевает достаточно переместится, а, во-вторых, тем, что акустический навигационный приемник болтался на 1.5-метровом кабеле за лодкой со всеми вытекающими последствиями.
Очень характерно выглядят повторы траектории с некоторым запаздыванием, получаемые при помощи акустической навигационной системы, в тех ее участках, где лодка интенсивно маневрировала.
Вообще, мы не планировали такой дальний поход банально боясь потерять лодку в камышах, но в какой-то момент я понял, что вряд-ли смогу безопасно развернуть корабль и принял решение направить ее по ветру, который как раз почти выносил ее на наш буй №3, где ее благополучно и выловил мой коллега.
Что мы имеем по результатам проведенного эксперимента?
- система работает в чудовищном с точки зрения гидрологии водоеме
- точность сопоставима с точностью наземных GPS
- не требует никакой калибровки
- интегрируется не сложнее обычного GPS-приемника
- развертывание не занимает много времени (в нашем случае три буя были в воде минут через 5, а четвертый еще через 10, и то, все это время было потрачено на то, чтобы обойти пруд)
Показывать треки достаточно детально при помощи картинки неудобно, поэтому треки я выкладывают отдельно, чтобы все кому интересно могли проанализировать их:
треки RedWAVE 12–05–2017
Спасибо за внимание.
«А на сегодня все!» ©
