Пишем XGBoost с нуля — часть 2: градиентый бустинг
Всем привет!
В прошлой статье мы разбирались, как устроены решающие деревья, и с нуля реализовали
алгоритм построения, попутно оптимизируя и улучшая его. В этой статье мы реализуем алгоритм градиентого бустинга и в конце создадим свой собственный XGBoost. Повествование будет идти по той же схеме: пишем алгоритм, описываем его, в заверешение подводим итоги, сравнивая результаты работы с аналогами из Sklearn’а.
В этой статье упор тоже будет сделан на реализацию в коде, поэтому всю теорию лучше почитать в другом вместе (например, в курсе ODS), и уже со знанием теории можно переходить к этой статье, так как тема достаточно сложная.
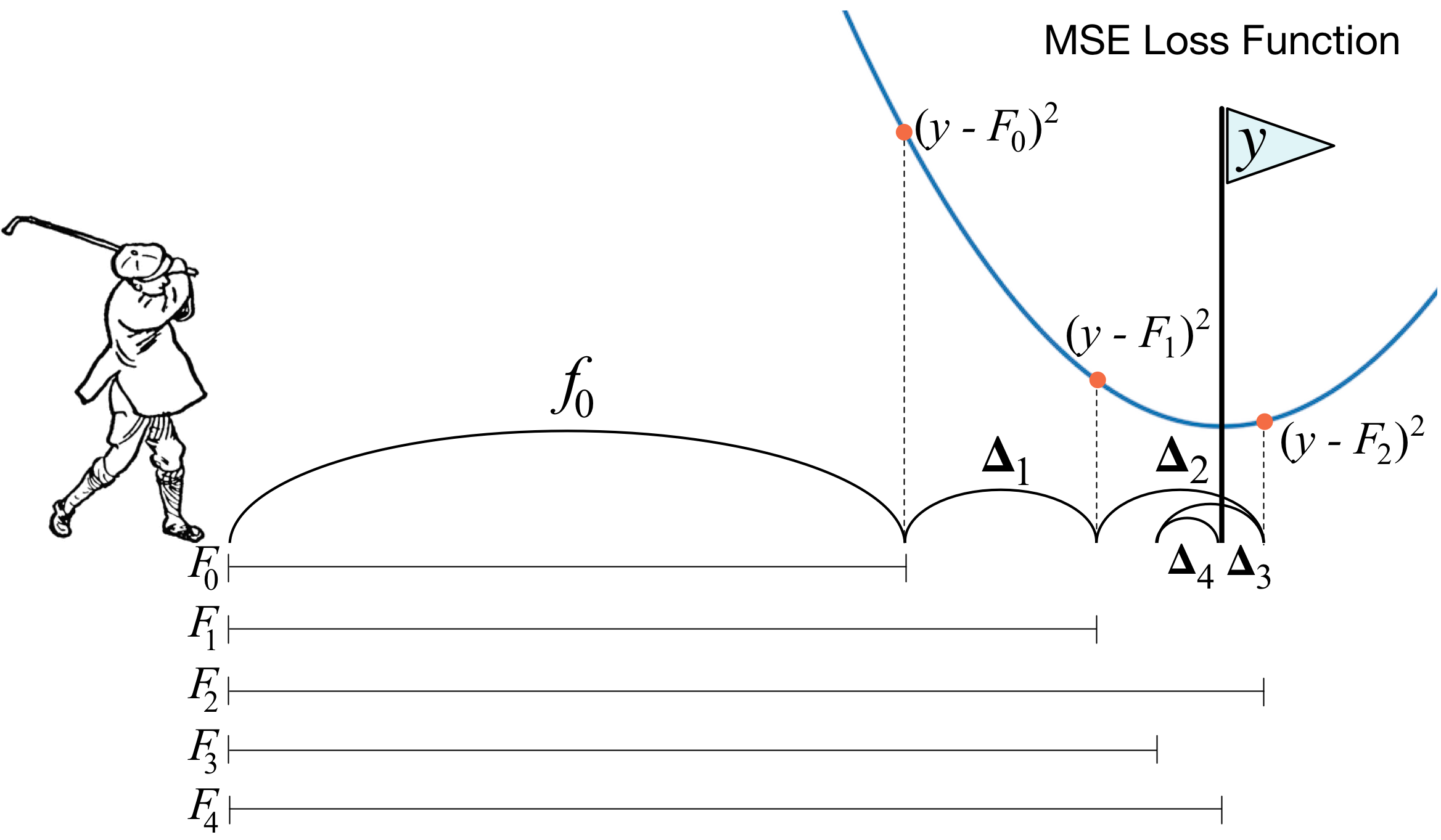
Что такое градиентный бустинг? Картинка с гольфистом как нельзя лучше описывает основную идею. Для того, что загнать мяч в лунку, гольфист делает каждый следующий удар с учётом опыта предыдущих ударов — для него это необходимое условие, чтобы загнать мяч в лунку. Еслиочень грубо (я не мастер игры в гольф :)), то при каждом новом ударе первое, на что смотрит гольфист, это на расстояние между мячом и лункой после предыдущего удара. И основная задача — следующим ударом уменьшить это расстояние.
Бустинг строится очень похожим способом. Во-первых, нам нужно ввести определение «лунки», то есть цели, к которой мы будем стремиться. Во-вторых, нам нужно научится понимать, в какую сторону нужно бить клюшкой, чтобы попасть ближе к цели. В-третьих, с учётом всех этих правил нужно придумать правильную последовательность ударов, чтобы каждый последующий сокращал расстояние между мячом и лункой.
Теперь дадим чуть более строгое определение. Введём модель взвешенного голосования:

Здесь  — это пространство, из которого берём объекты,
— это пространство, из которого берём объекты,  — это коэффицент перед моделью и непосредственно сама модель, то есть дерево решений. Допустим, что уже на каком-то шаге с помощью описанных правил удалось добавить в композицию
— это коэффицент перед моделью и непосредственно сама модель, то есть дерево решений. Допустим, что уже на каком-то шаге с помощью описанных правил удалось добавить в композицию  слабый алгоритм. Чтобы научиться понимать, какой-именно должен быть алгоритм на шаге
слабый алгоритм. Чтобы научиться понимать, какой-именно должен быть алгоритм на шаге  , введем функцию ошибки:
, введем функцию ошибки:

Получается, что наилучшим алгоритмом будет тот, который сможет максимально уменьшать ошибку, полученную на предыдущих итерациях. И так как бустинг градиентный, то у этой функции ошибки обязательно должен существовать вектор антиградиента, вдоль которого можно двигаться в поисках минимума. Всё!
Непосредственно перед реализацией вставлю ещё пару слов о том, как именно у нас всё будет устроено. Как и в прошлой статье, в качестве лосса возьмем MSE. Посчитаем её градиент:

Таким образом, вектор антиградиента будет равен  . На шаге
. На шаге  мы считаем ошибки алгоритма, полученного на прошлых итерациях. Далее обучаем наш новый алгоритм на этих ошибках, а затем со знаком минус и каким-то коэффициентом добавляем к нашему ансамблю.
мы считаем ошибки алгоритма, полученного на прошлых итерациях. Далее обучаем наш новый алгоритм на этих ошибках, а затем со знаком минус и каким-то коэффициентом добавляем к нашему ансамблю.
Теперь приступим к реализации.
1. Реализация обычного класса градиентного бустинга
import pandas as pd
import matplotlib.pyplot as plt
import numpy as np
from tqdm import tqdm_notebook
from sklearn import datasets
from sklearn.metrics import mean_squared_error as mse
from sklearn.tree import DecisionTreeRegressor
import itertools
%matplotlib inline
%load_ext Cython
%%cython -a
import itertools
import numpy as np
cimport numpy as np
from itertools import *
cdef class RegressionTreeFastMse:
cdef public int max_depth
cdef public int feature_idx
cdef public int min_size
cdef public int averages
cdef public np.float64_t feature_threshold
cdef public np.float64_t value
cpdef RegressionTreeFastMse left
cpdef RegressionTreeFastMse right
def __init__(self, max_depth=3, min_size=4, averages=1):
self.max_depth = max_depth
self.min_size = min_size
self.value = 0
self.feature_idx = -1
self.feature_threshold = 0
self.left = None
self.right = None
def fit(self, np.ndarray[np.float64_t, ndim=2] X, np.ndarray[np.float64_t, ndim=1] y):
cpdef np.float64_t mean1 = 0.0
cpdef np.float64_t mean2 = 0.0
cpdef long N = X.shape[0]
cpdef long N1 = X.shape[0]
cpdef long N2 = 0
cpdef np.float64_t delta1 = 0.0
cpdef np.float64_t delta2 = 0.0
cpdef np.float64_t sm1 = 0.0
cpdef np.float64_t sm2 = 0.0
cpdef list index_tuples
cpdef list stuff
cpdef long idx = 0
cpdef np.float64_t prev_error1 = 0.0
cpdef np.float64_t prev_error2 = 0.0
cpdef long thres = 0
cpdef np.float64_t error = 0.0
cpdef np.ndarray[long, ndim=1] idxs
cpdef np.float64_t x = 0.0
# начальное значение - среднее значение y
self.value = y.mean()
# начальная ошибка - mse между значением в листе
base_error = ((y - self.value) ** 2).sum()
error = base_error
flag = 0
# пришли на максимальную глубину
if self.max_depth <= 1:
return
dim_shape = X.shape[1]
left_value, right_value = 0, 0
for feat in range(dim_shape):
prev_error1, prev_error2 = base_error, 0
idxs = np.argsort(X[:, feat])
# переменные для быстрого переброса суммы
mean1, mean2 = y.mean(), 0
sm1, sm2 = y.sum(), 0
N = X.shape[0]
N1, N2 = N, 0
thres = 1
while thres < N - 1:
N1 -= 1
N2 += 1
idx = idxs[thres]
x = X[idx, feat]
# вычисляем дельты - по ним, в основном, будет делаться переброс
delta1 = (sm1 - y[idx]) * 1.0 / N1 - mean1
delta2 = (sm2 + y[idx]) * 1.0 / N2 - mean2
# увеличиваем суммы
sm1 -= y[idx]
sm2 += y[idx]
# пересчитываем ошибки за O(1)
prev_error1 += (delta1**2) * N1
prev_error1 -= (y[idx] - mean1)**2
prev_error1 -= 2 * delta1 * (sm1 - mean1 * N1)
mean1 = sm1/N1
prev_error2 += (delta2**2) * N2
prev_error2 += (y[idx] - mean2)**2
prev_error2 -= 2 * delta2 * (sm2 - mean2 * N2)
mean2 = sm2/N2
# пропускаем близкие друг к другу значения
if thres < N - 1 and np.abs(x - X[idxs[thres + 1], feat]) < 1e-5:
thres += 1
continue
if (prev_error1 + prev_error2 < error):
if (min(N1,N2) > self.min_size):
# переопределяем самый лучший признак и границу по нему
self.feature_idx, self.feature_threshold = feat, x
# переопределяем значения в листах
left_value, right_value = mean1, mean2
# флаг - значит сделали хороший сплит
flag = 1
error = prev_error1 + prev_error2
thres += 1
# ничего не разделили, выходим
if self.feature_idx == -1:
return
# вызываем потомков дерева
self.left = RegressionTreeFastMse(self.max_depth - 1)
self.left.value = left_value
self.right = RegressionTreeFastMse(self.max_depth - 1)
self.right.value = right_value
# новые индексы для обучения потомков
idxs_l = (X[:, self.feature_idx] > self.feature_threshold)
idxs_r = (X[:, self.feature_idx] <= self.feature_threshold)
# обучение потомков
self.left.fit(X[idxs_l, :], y[idxs_l])
self.right.fit(X[idxs_r, :], y[idxs_r])
def __predict(self, np.ndarray[np.float64_t, ndim=1] x):
if self.feature_idx == -1:
return self.value
if x[self.feature_idx] > self.feature_threshold:
return self.left.__predict(x)
else:
return self.right.__predict(x)
def predict(self, np.ndarray[np.float64_t, ndim=2] X):
y = np.zeros(X.shape[0])
for i in range(X.shape[0]):
y[i] = self.__predict(X[i])
return y
class GradientBoosting():
def __init__(self, n_estimators=100, learning_rate=0.1, max_depth=3,
random_state=17, n_samples = 15, min_size = 5, base_tree='Bagging'):
self.n_estimators = n_estimators
self.max_depth = max_depth
self.learning_rate = learning_rate
self.initialization = lambda y: np.mean(y) * np.ones([y.shape[0]])
self.min_size = min_size
self.loss_by_iter = []
self.trees_ = []
self.loss_by_iter_test = []
self.n_samples = n_samples
self.base_tree = base_tree
def fit(self, X, y):
self.X = X
self.y = y
b = self.initialization(y)
prediction = b.copy()
for t in tqdm_notebook(range(self.n_estimators)):
if t == 0:
resid = y
else:
# сразу пишем антиградиент
resid = (y - prediction)
# выбираем базовый алгоритм
if self.base_tree == 'Bagging':
tree = Bagging(max_depth=self.max_depth,
min_size = self.min_size)
if self.base_tree == 'Tree':
tree = RegressionTreeFastMse(max_depth=self.max_depth,
min_size = self.min_size)
# обучаемся на векторе антиградиента
tree.fit(X, resid)
# делаем предикт и добавляем алгоритм к ансамблю
b = tree.predict(X).reshape([X.shape[0]])
self.trees_.append(tree)
prediction += self.learning_rate * b
# добавляем только если не первая итерация
if t > 0:
self.loss_by_iter.append(mse(y,prediction))
return self
def predict(self, X):
# сначала прогноз – это просто вектор из средних значений ответов на обучении
pred = np.ones([X.shape[0]]) * np.mean(self.y)
# добавляем прогнозы деревьев
for t in range(self.n_estimators):
pred += self.learning_rate * self.trees_[t].predict(X).reshape([X.shape[0]])
return pred
Построим теперь кривую лосса на обучающей выборке, чтобы убедиться, что при каждой итерации у нас действительно происходит его уменьшение.
GDB = GradientBoosting(n_estimators=50)
GDB.fit(X,y)
x = GDB.predict(X)
plt.grid()
plt.title('Loss by iterations')
plt.plot(GDB.loss_by_iter)

2. Бэггинг над решающими деревьями
Отлично, перед тем как сравнивать результаты, давайте поговорим ещё и о процедуре бэггинга над деревьями.
Тут вс просто: мы хотим защититься от переобучения, и поэтому с помощью выборок с возращением будем усреднять наши предсказания, чтобы случайно не напороться на выбросы (почему это так работает — лучше почитайте по ссылке).
class Bagging():
'''
Класс Bagging - предназначен для генерирования бустрапированного
выбора моделей.
'''
def __init__(self, max_depth = 3, min_size=10, n_samples = 10):
#super(CART, self).__init__()
self.max_depth = max_depth
self.min_size = min_size
self.n_samples = n_samples
self.subsample_size = None
self.list_of_Carts = [RegressionTreeFastMse(max_depth=self.max_depth,
min_size=self.min_size) for _ in range(self.n_samples)]
def get_bootstrap_samples(self, data_train, y_train):
# генерируем индексы выборок с возращением
indices = np.random.randint(0, len(data_train), (self.n_samples, self.subsample_size))
samples_train = data_train[indices]
samples_y = y_train[indices]
return samples_train, samples_y
def fit(self, data_train, y_train):
# обучаем каждую модель
self.subsample_size = int(data_train.shape[0])
samples_train, samples_y = self.get_bootstrap_samples(data_train, y_train)
for i in range(self.n_samples):
self.list_of_Carts[i].fit(samples_train[i], samples_y[i].reshape(-1))
return self
def predict(self, test_data):
# для каждого объекта берём его средний предикт
num_samples = test_data.shape[0]
pred = []
for i in range(self.n_samples):
pred.append(self.list_of_Carts[i].predict(test_data))
pred = np.array(pred).T
return np.array([np.mean(pred[i]) for i in range(num_samples)])
Отлично, теперь в качестве базового алгоритма можем использовать не одно дерево, а бэггинг из деревьев — так мы, опять же, защитимся от переобучения.
3. Результаты
Сравним результаты наших алгоритмов.
from sklearn.model_selection import KFold
import matplotlib.pyplot as plt
from sklearn.ensemble import GradientBoostingRegressor as GDBSklearn
import copy
def get_metrics(X,y,n_folds=2, model=None):
kf = KFold(n_splits=n_folds, shuffle=True)
kf.get_n_splits(X)
er_list = []
for train_index, test_index in tqdm_notebook(kf.split(X)):
X_train, X_test = X[train_index], X[test_index]
y_train, y_test = y[train_index], y[test_index]
model.fit(X_train,y_train)
predict = model.predict(X_test)
er_list.append(mse(y_test, predict))
return er_list
data = datasets.fetch_california_housing()
X = np.array(data.data)
y = np.array(data.target)
er_boosting = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=40, base_tree='Tree' ))
er_boobagg = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=40, base_tree='Bagging' ))
er_sklearn_boosting = get_metrics(X,y,30,GDBSklearn(max_depth=3,n_estimators=40, learning_rate=0.1))
%matplotlib inline
data = [er_sklearn_boosting, er_boosting, er_boobagg]
fig7, ax7 = plt.subplots()
ax7.set_title('')
ax7.boxplot(data, labels=['Sklearn Boosting', 'Boosting', 'BooBag'])
plt.grid()
plt.show()
Получили:
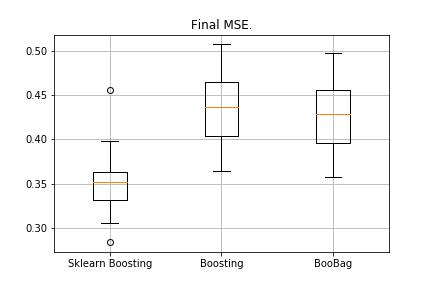
Мы пока не можем победить аналог из Sklearn, потому что опять не учитываем очень много параметров, которые используются в этом методе. Однако мы видим, что бэггинг чуть-чуть помогает.
Не будем отчаиваться, и перейдём к написанию XGBoost’а.
4. XGBoost
Прежде чем читать дальше, очень советую сначала ознакомиться со следующим видео, в нём очень хорошо объясняется теория.
Вспомним, какую ошибку мы минимизируем в обычном бустинге:

XGBoost явно добавляет регуляризацию в этот функционал ошибки:

Как считать этот функционал? Сначала приближаем его с помощью ряда Тейлора второго порядка, где новый алгоритм рассматривается как приращение, вдоль которого мы будем двигаться, и дальше уже расписываем в зависимости от того, какой у нас лосс:

Необходимо определить, какое дерево мы будем считать плохим, а какое хорошим.
Вспомним, на каком принципе построена с регрессия с  -регуляризацией — чем больше по норме значения коэффициентов перед регрессией, тем хуже, поэтому нужно, чтобы они были как можно меньше.
-регуляризацией — чем больше по норме значения коэффициентов перед регрессией, тем хуже, поэтому нужно, чтобы они были как можно меньше.
В XGBoost идея очень похожа: дерево штрафуется, если сумма нормы значений в листьях в нём очень большая. Поэтому сложность дерева здесь вводится следующим образом:

 — значения в листьях,
— значения в листьях,  — количество листьев.
— количество листьев.
В видео есть переходные формулы, мы их здесь выводить не будем. Всё сводится к тому, что новое разбиение мы будем выбирать, максимизируя gain:

Здесь  — это числовые параметры регуляризации, а
— это числовые параметры регуляризации, а  — соответствующие суммы из первых и вторых производных при данном разбиении.
— соответствующие суммы из первых и вторых производных при данном разбиении.
Всё, теория очень кратко изложена, ссылки даны, теперь поговорим, какими будут производные, если мы работает с MSE. Всё просто:

Когда будем считать суммы , к первой просто прибавляем  , а ко второй — просто количество.
, а ко второй — просто количество.
%%cython -a
import numpy as np
cimport numpy as np
cdef class RegressionTreeGain:
cdef public int max_depth
cdef public np.float64_t gain
cdef public np.float64_t lmd
cdef public np.float64_t gmm
cdef public int feature_idx
cdef public int min_size
cdef public np.float64_t feature_threshold
cdef public np.float64_t value
cpdef public RegressionTreeGain left
cpdef public RegressionTreeGain right
def __init__(self, int max_depth=3, np.float64_t lmd=1.0, np.float64_t gmm=0.1, min_size=5):
self.max_depth = max_depth
self.gmm = gmm
self.lmd = lmd
self.left = None
self.right = None
self.feature_idx = -1
self.feature_threshold = 0
self.value = -1e9
self.min_size = min_size
return
def fit(self, np.ndarray[np.float64_t, ndim=2] X, np.ndarray[np.float64_t, ndim=1] y):
cpdef long N = X.shape[0]
cpdef long N1 = X.shape[0]
cpdef long N2 = 0
cpdef long idx = 0
cpdef long thres = 0
cpdef np.float64_t gl, gr, gn
cpdef np.ndarray[long, ndim=1] idxs
cpdef np.float64_t x = 0.0
cpdef np.float64_t best_gain = -self.gmm
if self.value == -1e9:
self.value = y.mean()
base_error = ((y - self.value) ** 2).sum()
error = base_error
flag = 0
if self.max_depth <= 1:
return
dim_shape = X.shape[1]
left_value = 0
right_value = 0
# начинаем процесс обучения
# чуть-чуть матана - у нас mse, L = (y - pred)**2
# dL/dpred = pred - y, эту разницу мы в бустинге будем передавать со знаком -
# dL^2/d^2pred = 1 - получается, это просто количество объектов в листе
for feat in range(dim_shape):
idxs = np.argsort(X[:, feat])
gl,gr = y.sum(),0.0
N1, N2, thres = N, 0, 0
while thres < N - 1:
N1 -= 1
N2 += 1
idx = idxs[thres]
x = X[idx, feat]
gl -= y[idx]
gr += y[idx]
# считаем гейн
gn = (gl**2) / (N1 + self.lmd) + (gr**2) / (N2 + self.lmd)
gn -= ((gl + gr)**2) / (N1 + N2 + self.lmd) + self.gmm
if thres < N - 1 and x == X[idxs[thres + 1], feat]:
thres += 1
continue
# проверяем условия на гейн
if (gn > best_gain) and (min(N1,N2) > self.min_size):
flag = 1
best_gain = gn
left_value = -gl / (N1 + self.lmd)
right_value = -gr / (N2 + self.lmd)
self.feature_idx = feat
self.feature_threshold = x
thres += 1
self.gain = best_gain
if self.feature_idx == -1:
return
self.left = RegressionTreeGain(max_depth=self.max_depth - 1, gmm=self.gmm, lmd=self.lmd)
self.left.value = left_value
self.right = RegressionTreeGain(max_depth=self.max_depth - 1, gmm=self.gmm, lmd=self.lmd)
self.right.value = right_value
idxs_l = (X[:, self.feature_idx] > self.feature_threshold)
idxs_r = (X[:, self.feature_idx] <= self.feature_threshold)
self.left.fit(X[idxs_l, :], y[idxs_l])
self.right.fit(X[idxs_r, :], y[idxs_r])
# подрубаем отрицательный гейн
if (self.left.left == None or self.right.left == None):
if self.gain < 0.0:
self.left = None
self.right = None
self.feature_idx = -1
def __predict(self, np.ndarray[np.float64_t, ndim=1] x):
if self.feature_idx == -1:
return self.value
if x[self.feature_idx] > self.feature_threshold:
return self.left.__predict(x)
else:
return self.right.__predict(x)
def predict(self, np.ndarray[np.float64_t, ndim=2] X):
y = np.zeros(X.shape[0])
for i in range(X.shape[0]):
y[i] = self.__predict(X[i])
return y
Небольшое уточнение: чтобы формулы в деревьях с gain’ом были красивее, в бустинге обучаем таргет со знаком минус.
Слегка модифицируем наш бустинг, сделаем некоторые параметры адаптивными. Например, если замечаем, что лосс начал выходить на плато, то уменьшаем learning rate и увеличиваем max_depth у следующих эстиматоров. Также добавим новый бэггинг — теперь сделаем бустинг над бэггингами из деревьев с gain’ом:
class Bagging():
def __init__(self, max_depth = 3, min_size=5, n_samples = 10):
self.max_depth = max_depth
self.min_size = min_size
self.n_samples = n_samples
self.subsample_size = None
self.list_of_Carts = [RegressionTreeGain(max_depth=self.max_depth,
min_size=self.min_size) for _ in range(self.n_samples)]
def get_bootstrap_samples(self, data_train, y_train):
indices = np.random.randint(0, len(data_train), (self.n_samples, self.subsample_size))
samples_train = data_train[indices]
samples_y = y_train[indices]
return samples_train, samples_y
def fit(self, data_train, y_train):
self.subsample_size = int(data_train.shape[0])
samples_train, samples_y = self.get_bootstrap_samples(data_train, y_train)
for i in range(self.n_samples):
self.list_of_Carts[i].fit(samples_train[i], samples_y[i].reshape(-1))
return self
def predict(self, test_data):
num_samples = test_data.shape[0]
pred = []
for i in range(self.n_samples):
pred.append(self.list_of_Carts[i].predict(test_data))
pred = np.array(pred).T
return np.array([np.mean(pred[i]) for i in range(num_samples)])
class GradientBoosting():
def __init__(self, n_estimators=100, learning_rate=0.2, max_depth=3,
random_state=17, n_samples = 15, min_size = 5, base_tree='Bagging'):
self.n_estimators = n_estimators
self.max_depth = max_depth
self.learning_rate = learning_rate
self.initialization = lambda y: np.mean(y) * np.ones([y.shape[0]])
self.min_size = min_size
self.loss_by_iter = []
self.trees_ = []
self.loss_by_iter_test = []
self.n_samples = n_samples
self.base_tree = base_tree
# хотим как-то регулировать работу алгоритма на поздних итерациях
# если ошибка застряла, то уменьшаем lr и увеличиваем max_depth
self.add_to_max_depth = 1
self.init_mse_board = 1.5
def fit(self, X, y):
print (self.base_tree)
self.X = X
self.y = y
b = self.initialization(y)
prediction = b.copy()
for t in tqdm_notebook(range(self.n_estimators)):
if t == 0:
resid = y
else:
resid = (y - prediction)
if (mse(temp_resid,resid) < self.init_mse_board):
self.init_mse_board /= 1.5
self.add_to_max_depth += 1
self.learning_rate /= 1.1
# print ('Alert!', t, self.add_to_max_depth)
if self.base_tree == 'Bagging':
tree = Bagging(max_depth=self.max_depth+self.add_to_max_depth,
min_size = self.min_size)
resid = -resid
if self.base_tree == 'Tree':
tree = RegressionTreeFastMse(max_depth=self.max_depth+self.add_to_max_depth, min_size = self.min_size)
if self.base_tree == 'XGBoost':
tree = RegressionTreeGain(max_depth=self.max_depth+self.add_to_max_depth, min_size = self.min_size)
resid = -resid
tree.fit(X, resid)
b = tree.predict(X).reshape([X.shape[0]])
# print (b.shape)
self.trees_.append(tree)
prediction += self.learning_rate * b
temp_resid = resid
return self
def predict(self, X):
# сначала прогноз – это просто вектор из средних значений ответов на обучении
pred = np.ones([X.shape[0]]) * np.mean(self.y)
# добавляем прогнозы деревьев
for t in range(self.n_estimators):
pred += self.learning_rate * self.trees_[t].predict(X).reshape([X.shape[0]])
return pred
5. Результаты
По традиции, сравним результаты:
data = datasets.fetch_california_housing()
X = np.array(data.data)
y = np.array(data.target)
import matplotlib.pyplot as plt
from sklearn.ensemble import GradientBoostingRegressor as GDBSklearn
er_boosting_bagging = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=150,base_tree='Bagging'))
er_boosting_xgb = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=150,base_tree='XGBoost'))
er_sklearn_boosting = get_metrics(X,y,30,GDBSklearn(max_depth=3,n_estimators=150,learning_rate=0.2))
%matplotlib inline
data = [er_sklearn_boosting, er_boosting_xgb, er_boosting_bagging]
fig7, ax7 = plt.subplots()
ax7.set_title('')
ax7.boxplot(data, labels=['GdbSklearn', 'Xgboost', 'XGBooBag'])
plt.grid()
plt.show()
Картинка будет следующая:
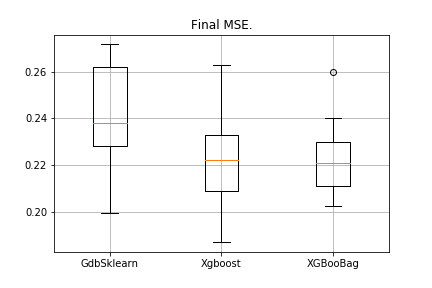
Самая низкая ошибка у XGBoost, но у XGBooBag ошибка более скученная, что определённо лучше: алгоритм более устойчив.
На этом всё. Очень надеюсь, что материал, изложенный в двух статьях, был полезен, и вы смогли узнать для себя что-то новое. Особую благодарность выражаю Дмитрию за всестороннюю обратную связь и исходники, Антону — за советы, Владимиру — за сложные задания по учебе.
Всем успехов!
