Пепелац из ховерборда. Делаем трайк для инвалида

Судари и сударыни, это моя первая публикация здесь, поэтому позвольте для начала представиться: Зебра, Пыльная Зебра. Скажете — ну вот, еще один псих — не мог получше ник выдумать. Так уж получилось, тот ник, который я использую в других местах, здесь оказался занят, а регистрироваться как-то было надо. Из школьных лет память вдруг вынесла название одного рассказика — ну да ладно, пусть оно и будет.
Вообще я счастливчик. Всегда был здоровым человеком, и даже простуда редко брала. А тут несколько лет назад заболел — кто бы еще понял, что это было. Голова — предмет темный и исследованию не подлежит. И я даже не кинул ласты и даже не переквалифицировался в овощ. Подумаешь — слегка окосел — это не проблема, одел повязку на один глаз, и все нормально, даже романтично — на пирата похож.
То, что внизу ничего не видно — тоже к лучшему, нечего там смотреть, смотри вперед. Ходить не можешь —, а для чего люди колесо придумали? — возьми коляску и езжай. Твою речь перестали поднимать? Возьми ручку и пиши. Писать не можешь, руки трясутся? Какие проблемы —, а компьютер для чего?
Ну и со временем проблемы понемногу отступать стали — теперь даже коляска не нужна, пары палок вполне хватает, чтобы передвигаться. Короче, Везунчик — мое второе имя.
Правда, прождав года два моего выздоровления, с работы меня выставили на пенсию — почему-то местный дизайнерский центр Texas Instruments не захотел иметь на работе инженера по применению, причем далеко не рядового, который не мог нормально общаться с коллегами и
клиентами, а в лабораторию его пускать просто опасно. Странно, да?
Это называется — опасайся своих желаний, иногда они сбываются. Но у судьбы особое чувство юмора — комики отдыхают. Не ты ли хотел иметь больше свободного времени, чтобы заниматься чем-то интересным? Получи, распишись — занимайся, чем хочешь. Если сможешь :)
На вождение машины на какое-то время получил запрет, но через какое-то время его сняли, опять свезло. Без транспорта тяжело. Но на велосипеде ездить, когда даже на ногах удержать равновесие не можешь — это из области ненаучной фантастики. Как-то у своих физиотерапевтов я заикнулся об этом — на меня посмотрели с сожалением — у него еще и крыша поехала.
На местной интернет-барахолке как-то увидел гироскутер — оказывается, их продают по смешным ценам. Народ накупил их поначалу, потом понял, что вещь не особо полезная. А у кого-то просто батарейки сдохли — в ближайшей лавке их не купишь, кроме того — они не дешевые и не все привыкли отвертку в руках держать, чтобы их поменять. Стали избавляться от них по бросовым ценам. А у меня появилась навязчивая идея извлечь пользу их этих сумасшедших колесиков. И сделать себе транспорт для велосипедных дорожек, которых в нашем городке просто немерено.
Надо отметить, что готовые скутеры для инвалидов не так уж и дороги —, но больно тяжелые и большие.

В багажник даже универсала такой не затолкаешь. И хранить — много места занимает. Весит он больше 120 кг.

В итоге, купил я эти колесики — хотя дама, продававшая их посмотрела на меня с непониманием — зачем человеку, который на ногах с трудом стоит, эта шайтан-арба?
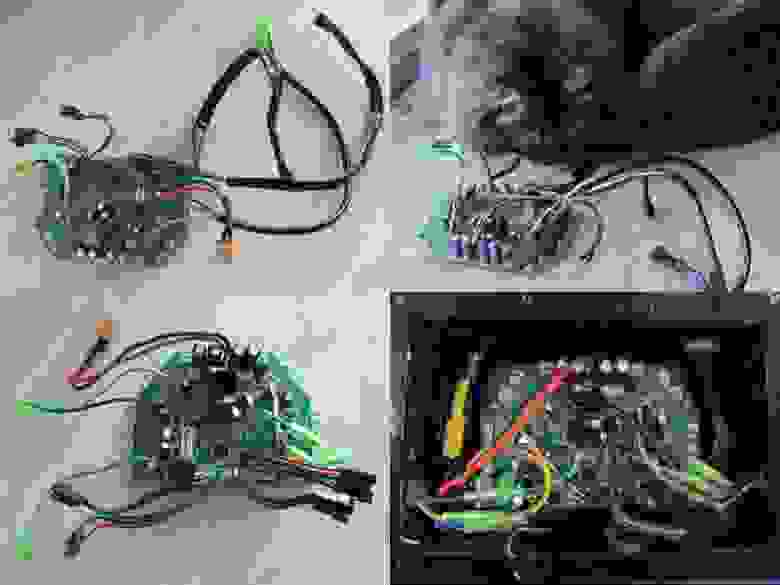
Тащим добычу домой и начинаем разбираться — чего нам перепало?

Самое главное — два мотор-колеса с мощностью 350 ватт каждое.
Аккумулятор — как правило, на нем написано 4.4 амперчаса 36 вольт — т.е. батарея 2p10s из ячеек 18650. По бокам две платы с широко известными в узких кругах 6DOF IMU MPU6050.

Силовая плата управления моторами на базе микропроцессора STM32F103RCT6 или китайского аналога GD32F103RCT6 — что, впрочем, без разницы.
Драйверы для управления полевыми транзисторами, коммутирующими обмотки хаб-моторов, собраны на куче транзисторов, которые с успехом заменяют копеечную микросхему наподобие IR2110. Зачем так сделано — сие науке неизвестно.
Еще одно чудо враждебной техники — понижающий преобразователь. Несколько транзисторов — такое решение я встречал несколько десятков лет назад. Схема — перфекционистов источников питания попросим отвернуться.
При зарядке последовательно с батареей почему-то оказался включен диод, причем с дико большим падением напряжения — 1 Вольт.
Зарядка используется стандартная на 42 Вольта, поэтому самый жирный последний вольт аккумулятору не достается, он заряжается всего до 41 Вольта. Зато срок службы батареи увеличивается — Маск не даст соврать.

Несмотря на все выше сказанное, плата прекрасно работает и с небольшими модификациями она практически одинакова в большинстве гироскутеров.
Есть еще какие-то платки с моргающими светодиодами, поющий bluetooth с динамиком, но они на скорость никак не влияют.
Все это может криво-косо использоваться как есть, но гораздо лучше воспользоваться альтернативным программным обеспечением. По моему мнению, лучший вариант — hoverboard firmware hack FOC.
Можно использовать движение накатом и легко реализуется торможение. К сожалению, без рекуперации —, но для транспорта с такими маленькими колесами это не особо актуально.
Для прошивки понадобится программатор ST-link, цена китайского клона на Али в районе полутора евро.
Во всех описаниях альтернативных прошивок сказано — не запитывайте при прошивке плату от программатора, включите питание от батареи или внешнего блока питания, подключенного вместо батареи. Я не поверил — как дохленькие 3.3 Вольта от программатора могут что-то сжечь?
Оказывается, очень даже могут — процессор сдох, пришлось новый впаивать. Точки подключения программатора: 
Программное обеспечение конфигурируется. В plaformio.ini нужно выбрать ваш вариант управления — в моем случай это UART:
;=================== VARIANT SELECTION ==========================
;
; Choose one or all variants get built
;
;default_envs = VARIANT_ADC ; Variant for control via ADC input
default_envs = VARIANT_USART ; Variant for Serial control via USART3 input
;default_envs = VARIANT_NUNCHUK ; Variant for Nunchuk controlled vehicle build
В файле config.h нужно выбрать алгоритм управления:
// Control selections
#define CTRL_TYP_SEL FOC_CTRL
...
#define CTRL_MOD_REQ TRQ_MODE
Если нужно движение накатом, электронный дифференциал и прочие плюшки — FOC — правильный выбор.
Как правило, измерение напряжения работает неправильно — подстраивается строкой#define BAT_CALIB_ADC 1595
Чтобы долго не заморачиваться — посмотрел, какое напряжение выдает UART с калибровкой по умолчанию, измерил напряжение на батарее и пропорционально ошибке изменил калибровочный коэффициент. Так же подстраивается и коэффициент для измерения температуры платы — в моем случае ошибка была всего 2 градуса — оставил все, как есть.
Для управления в первой версии трайка сделал контрольную панель на том же STM32 — на входе пока ручка управления газом по типу мотоциклетной с переключателем вперед/назад. Эта ручка была причиной задержки — в местных лавках не купишь, а из Китая больше месяца шло. На будущее планировался электрический тормоз на задние колеса —, но рукоятка была еще где-то в пути. Пока пришлось довольствоваться механическим тормозом на переднее колесо.

Пока суть да дело, можно и раму сварить. Сама конструкция проста, как мыло. За сварку попрошу не критиковать — сварщик я не настоящий. Кроме того — пепелац делался для инвалида инвалидом (помоги себе сам) —, а вижу я плохо ниже уровня глаз, бинокулярное зрение не работает. Чтобы что-то варить — электрод надо держать двумя руками и с опорой под локти. Мне еще свезло, порой люди с подобными симптомами ложку ко рту не могут самостоятельно поднести. Короче, работал слепой сварщик с дикого похмелья :)

Нарезаем трубки и части от донора — детского велосипеда, и свариваем все вместе, красим, собираем и наслаждаемся результатом.

Получившийся пепелац на батарее 10А·ч проезжает немногим больше 25 км. Скорость — максимум 25 км в час, но с такими маленькими колесиками без подвески и амортизаторов больше 15–20 км в час ездить не стоит. Ну и гравицапу помощнее поставить надо — 25 километров маловато будет.
Родные аккумуляторы от скутера как-то не очень подходят, чтобы мой вес таскать, далеко не уедешь. Поэтому купил новую батарею на 10.4 ампер-час — по-хорошему, надо было купить аккумуляторы и сварить батарею самому — BMS, полоски для сварки были заказаны, но пока они придут из Китая — уже и снег выпадет. А готовая батарея приехала из чешского склада за неделю.
Для чистоты эксперимента сделал тестер для измерения потребления тока и напряжения батареи на ходу с записью на SD карточку.
Проехал 4.05 км, потрачено 1.17 A·ч заряда. Значит, теоретически на родном гироскутерном 4.4 A·ч аккумуляторе можно проехать около 14 км, на двойном — 28 км, а на 10.4 A·ч — 34 соответственно. По-моему — вполне недурно, если учесть мой вес и дорогу с подъемами.

Уже после окончания сезона решил навести ревизию в образовавшихся батареях. Пришлось делать тестер батарей. Оказалось, что ко мне попали неплохо сохранившиеся батареи, причем из двух из них параметры были очень похожи.

Не пропадать же добру — сделал из них еще одну батарею, всего 8.8А·ч —, но тоже хлеб.

Долгими зимними вечерами делать ничего не получается — гараж занят машиной. Мечтаем, что сделаем, когда потеплеет.
Тем более что, за зиму накопилось много ништяков
Колесо с барабанным тормозом от самоката-роллатора. Самокат отобран у старушки куплен в ужасном состоянии и неоправданно дорого —, но новое колесо стоит еще дороже. В предыдущей версии пепелаца от него пошли в ход сидение и багажная корзинка, колесо в момент покупки уже было установлено от детского велосипеда, переделывать не хотелось.
Название самоката, кстати, характерное — Esla.

Старый велосипед, как источник трубок и прочих ништяков — отдали даром. Даже жалко пилить было — вполне можно было в порядок привести. Но искусство требует жертв :)
В качестве сиденья используем стул из Ikea, купленный за безумные деньги бесценок на той же барахолке.
В магазине закуплены разные мебельные профиля 20×20х2 мм, 25×15х1.25 мм, мебельная труба 25×1.25 мм. Всякие разные гайки, шайбы и болты.
Что пришлось заказать из Китая (список не полный, мелочи остались за кадром):
- вкладыш для сайлентблока;
- амортизатор;
- ручка газа с переключателем вперед/назад и ручка тормоза;
- считыватель RFID;
- дисплей от Nokia-5510;
- STM32F103C8T6 Blue pill модуль.
Имейте в виду, что запросто может попасться модуль с какой-нибудь китайской копией STM32F103C8T6, даже если микросхема выглядит, как оригинальная. И даже если до этого вы покупали у этого же продавца такой модуль с оригинальным микроконтроллером. Но это не безнадежный случай, после танцев с бубном обычно удается заставить его работать так, как надо. Но эти танцы могут отнять время.
Макетные платы когда-то давно заказывал — иногда нужны макетки побольше размером, а готовые продают маленькие.
Делаем основу скутера — заднюю часть с мотор-колесами, сайлентблоками и амортизатором.

Немного переделываем рулевую часть велосипеда.

Колесо с барабанным тормозом нуждается в небольшой модификации, чтобы его можно было закрепить в велосипедной вилке.

Первый вариант рамы — после примерки оказался длинноват, пришлось урезать осетра сантиметров на 5.

Заодно добавились подставки для ног.

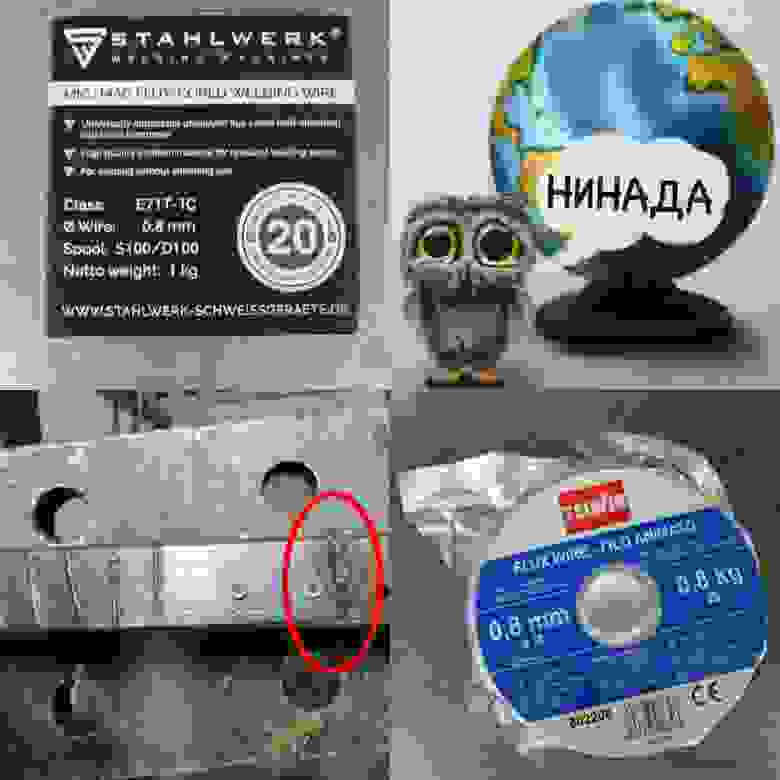
В середине процесса кончилась сварочная проволока, которой был укомплектован недавно купленный полуавтомат. Не беда — в прошлом году в местном магазине не оказалось сварочной проволоки нужного диаметра — пришлось заказать из Германии.
Заправляем новую проволоку —, а варить-то ей, оказывается, невозможно! Металл разлетается черными каплями, ничего не проваривается и в гараже стоит страшный дым. Интересно, как в прошлом году мне что-то удалось приварить этой проволокой? И что-то я сомневаюсь, что это изделие имеет какое-то отношение к немцам, несмотря на красивую упаковку. «При современном развитии печатного дела на Западе в Китае напечатать советский паспорт красивую упаковку — это такой пустяк, что об этом смешно говорить!» ©
К счастью, в нескольких километрах от дома пару месяцев назад построили новый магазин Motonet, и, судя по их сайту, эта проволока у них есть. Седлаем старый пепелац и через час имеем в гараже катушку новой проволоки, с которой можно варить безо всяких приключений.
Для управления пепелацем используется последовательный интерфейс.
На руле смонтирован блок, изображающий панель управления. Все смонтировано на макетной плате, на нее приходят сигналы от ручки газа, переключателя направления движения и ручки тормоза. Для включения устройства используется RFID ключ. На дисплее отображается напряжение батареи и температура платы управления двигателями.
Дисплей — дешевый модуль от Nokia-5510, если не включать подсветку, он неплохо виден при солнечном свете.

Скорость, время и пройденный путь отображается смонтированным рядом велокомпьютером. На маленьком дисплее отобразить все параметры если и получится, то разглядеть их вряд ли выйдет. А переключать режимы отображения на ходу — так себе затея.
Корпус напечатан на 3D принтере — куда же нынче без него :) — как в старом анекдоте — «Пионер, у тебя нож есть? Какой же ты пионер без ножа? Вот тебе 100 грамм и пончик.»
При необходимости можно добавить новый RFID ключ, главное — запомнить и правильно выполнить последовательность действий. Но я ее уже забыл. Кажется так — включить задний ход, потом нажать тормоз и включить питание. Попинать по правому колесу, два раза хрюкнуть :), переключить на передний ход, поднести новый ключ, еще раз хрюкнуть и тормознуть — новый ключ будет добавлен в память. Может, что перепутал — надо исходники глянуть. Может быть крякать надо, а не хрюкать.
Тестируем электронику — пока все не на местах, лишь бы убедиться, что что-то работает.
Подготавливаем коробочку для монтажа электроники, заталкиваем плату со всеми проводами, как есть. Если их укоротить, вид был бы намного культурнее, но как есть — удобнее, если по какой-то причине плату понадобится поменять. Все это безобразие закрываем крышечкой, пока по временной схеме. На постоянку потом примажем силиконовую прокладку.

Для батарейки берется строго первая попавшаяся коробочка, нашедшаяся в гараже и примерно подходящая по размеру. Жертвой оказалась коробка от дремелеподобной машинки — внутренняя часть с отсеками этой машинкой и вырезана. Аккумулятору места хватит с большим запасом, еще придется уплотнитель затолкать, чтобы он не болтался.

Прикручиваем коробку к задней раме.
Переходим к рулю. Монтируем рукоятку механического тормоза, совмещенного с электронным. Тут очень кстати пришелся хлам, оставшийся от разборки нескольких велосипедов и самоката. Все удалось подобрать из имеющихся запасов, ни делать, ни покупать ничего не пришлось. С другой стороны — рукоятка газа. Посредине — блок управления и велокомпьютер.

Самое сложное в руле — выбрать звонок. Пришлось обратиться за помощью к супруге. Если бы не она — я бы купил дудку. Но дудка была забракована, маленький звонок последовал за дудкой, но зато выбор звонка с картинкой занял определенное время — картинки были разные. В итоге приобретен Линукс с зонтиком.

Когда проводка, наконец, смонтирована, выясняется, что никто никуда не едет. Ничего не включается. Себе не особо доверяю, плохо видя, что делаешь — запросто можно ошибиться в подключении. Перебрал все свои соединения — все нормально. И через полдня мучений обнаруживается, что переломлен провод внутри разъема, унаследованного от гироскутера. Абидно аднако, да?
В загашнике находятся такие же разъемы, немного укорачиваем провод и все восстанавливается.
Заводим пепелац — и обнаруживаем, что с места его особо не стронешь. Пока игрался на столе с платой — включил опцию стояночного тормоза, а выключить забыл. В итоге, если скутер пытаешься сдвинуть, он сопротивляется изо всех сил. Опять громоздим транспорт на столик, будем программное перепрошивать. Ниже уровня глаз мозги информацию воспринимают плохо, все смазано и кружится. Пытаемся обмануть ситуацию — китайцы продают очки с призмами. Не знаю, для чего они еще могут подойти —, но мне иногда помогают. Хотя изображение несколько удаляют —, но в комбинации с очками для чтение что-то сделать можно. Ну и кое-какая практика нужна — иначе в основном свой живот видишь. После модификации пробуем выкатить из гаража полуфабрикат — удивительно, но он едет.

Как говорит мудрая пословица — не трогай технику, она не подведет.
Но дурная голова рукам покоя не дает. Все-таки вытащил я плату управления двигателями. Ну очень длинные провода. Кошка смотрит явно с неодобрением. Чего она не одобряет — не говорит. То ли ей тоже длинные провода не нравятся, то ли идея их укоротить. Тем не менее я их укорачиваю. В закрытой и заклеенной на герметик коробке видно не будет, но зато совесть мучить не будет, что на силовых проводах теряется 0.01% мощности.
Привариваем кронштейн для корзинки, к нему же будет крепиться держатель для клюшек для гольфа палок.

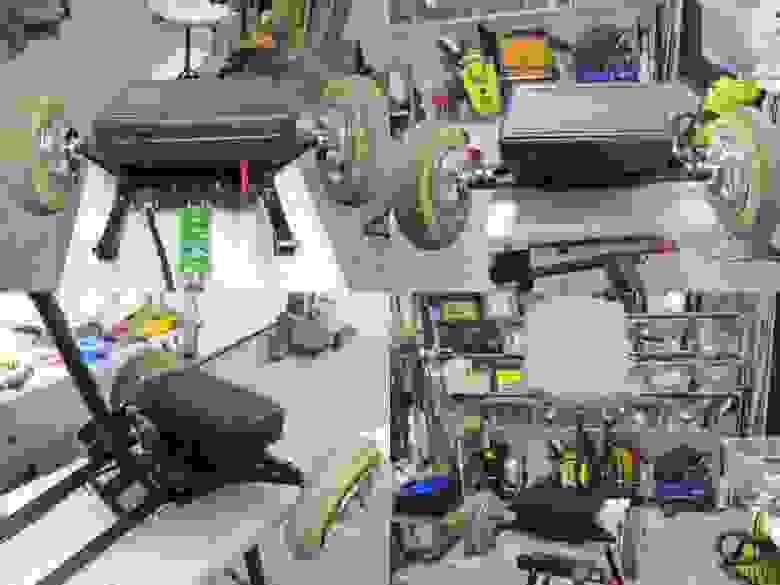
Пепелац в процессе постройки по сравнению в первой версией.

В общем, практически все готово — едем тестировать. Заодно в магазине помидорок купим и на фоне университета сфотографируемся.

Статья получилась несколько сумбурная, подробности по разным темам можно почитать здесь:
Было у меня еще несколько статей по этой теме, но они мало кого заинтересовали, а может просто были размещены в неправильном месте — в итоге я их стер.
Для потенциальных критиков
Сопромат?
Нет, не слышал. Но советы будут приняты с благодарностью.
Да ты варить вообще не умеешь!
Да, не умею. И плохо вижу, что делаю. И руки трясутся так, что даже обычной ручкой написать что-то читаемое плохо получается.
P.S.
Я не самый большой псих в округе — много лет назад мужичок из деревни неподалеку, сделал из подручных материалов самолет, потом долго с полицией бодался — для начала у него пропеллер открутили и отобрали, сказали больше так не делать. Потом штрафовали, и он даже условный срок умудрился заработать.

