Открытый курс машинного обучения. Тема 9. Анализ временных рядов с помощью Python
Доброго дня!
Мы продолжаем наш цикл статей открытого курса по машинному обучению и сегодня поговорим о временных рядах.
Посмотрим на то, как с ними работать в Python, какие возможные методы и модели можно использовать для прогнозирования; что такое двойное и тройное экспоненциальное взвешивание; что делать, если стационарность — это не про вас; как построить SARIMA и не умереть; и как прогнозировать xgboost-ом. И всё это будем применять к примеру из суровой реальности.
План этой статьи:
- Движемся, сглаживаем и оцениваем
- Rolling window estimations
- Экспоненциальное сглаживание, модель Хольта-Винтерса
- Кросс-валидация на временных рядах, подбор параметров
- Эконометрический подход
- Стационарность, единичные корни
- Избавляемся от нестационарности и строим SARIMA
- Линейные и не очень модели на временных рядах
- Извлечение признаков (Feature extraction)
- Линейная регрессия vs XGBoost
- Полезные ресурсы
Введение
На работе я практически ежедневно сталкиваюсь с теми или иными задачами, связанными с временными рядам. Чаще всего возникает вопрос —, а что у нас будет происходить с нашими показателями в ближайший день/неделю/месяц/пр. — сколько игроков установят приложения, сколько будет онлайна, как много действий совершат пользователи, и так далее. К задаче прогнозирования можно подходить по-разному, в зависимости от того, какого качества должен быть проноз, на какой период мы хотим его строить, и, конечно, как долго нужно подбирать и настраивать параметры модели для его получения.
Начнем с простых методов анализа и прогнозирования — скользящих средних, сглаживаний и их вариаций.
Движемся, сглаживаем и оцениваем
Небольшое определение временного ряда:
Временной ряд — это последовательность значений, описывающих протекающий во времени процесс, измеренных в последовательные моменты времени, обычно через равные промежутки
Таким образом, данные оказываются упорядочены относительно неслучайных моментов времени, и, значит, в отличие от случайных выборок, могут содержать в себе дополнительную информацию, которую мы постараемся извлечь.
Импортируем нужные библиотеки. В основном нам понадобится модуль statsmodels, в котором реализованы многочисленные методы статистического моделирования, в том числе для временных рядов. Для поклонников R, пересевших на питон, он может показаться очень родным, так как поддерживает написание формулировок моделей в стиле 'Wage ~ Age + Education'.
import sys
import warnings
warnings.filterwarnings('ignore')
from tqdm import tqdm
import pandas as pd
import numpy as np
from sklearn.metrics import mean_absolute_error, mean_squared_error
import statsmodels.formula.api as smf
import statsmodels.tsa.api as smt
import statsmodels.api as sm
import scipy.stats as scs
from scipy.optimize import minimize
import matplotlib.pyplot as pltВ качестве примера для работы возьмем реальные данные по часовому онлайну игроков в одной из мобильных игрушек:
from plotly.offline import download_plotlyjs, init_notebook_mode, plot, iplot
from plotly import graph_objs as go
init_notebook_mode(connected = True)
def plotly_df(df, title = ''):
data = []
for column in df.columns:
trace = go.Scatter(
x = df.index,
y = df[column],
mode = 'lines',
name = column
)
data.append(trace)
layout = dict(title = title)
fig = dict(data = data, layout = layout)
iplot(fig, show_link=False)
dataset = pd.read_csv('hour_online.csv', index_col=['Time'], parse_dates=['Time'])
plotly_df(dataset, title = "Online users")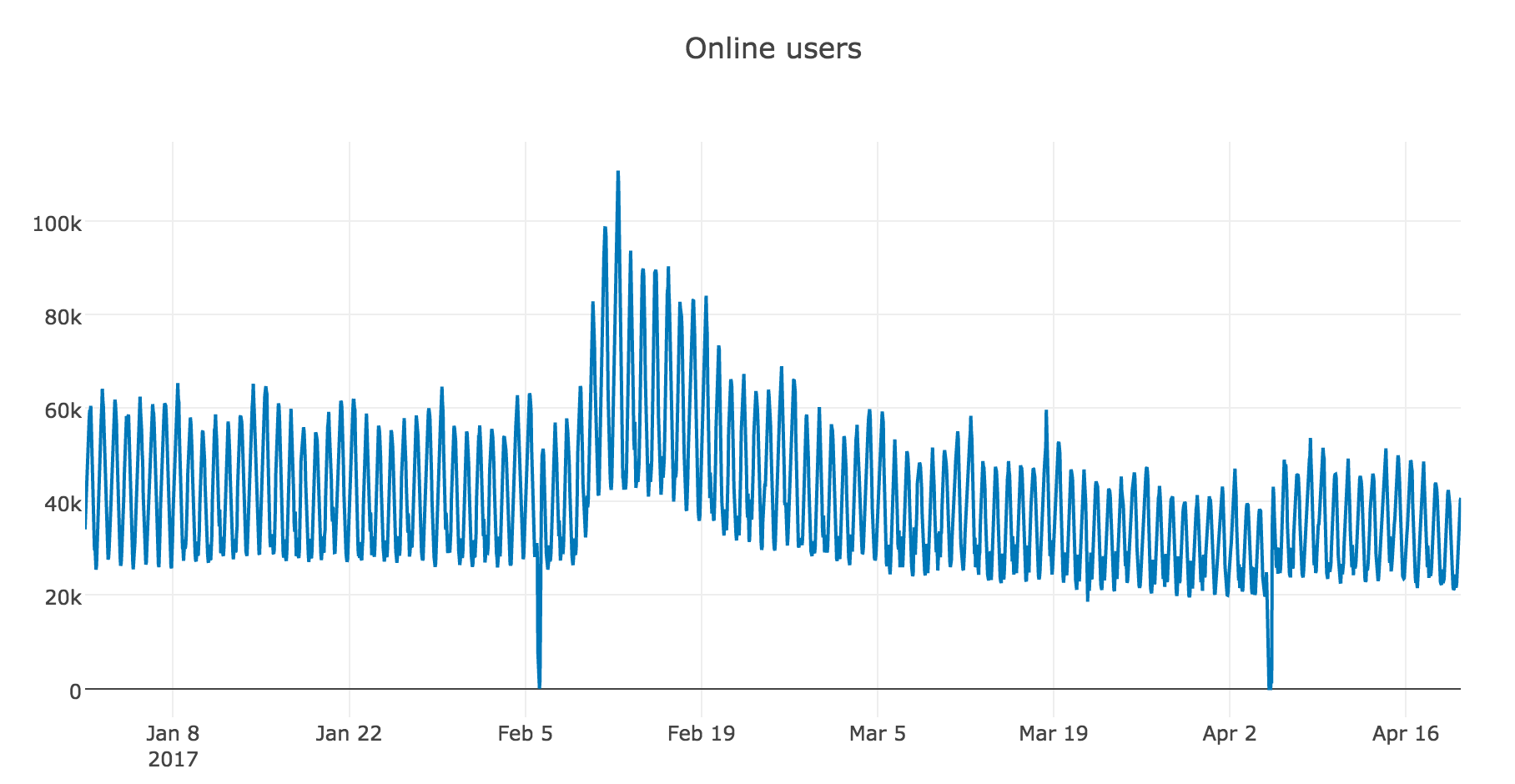
Rolling window estimations
Начнем моделирование с наивного предположения — «завтра будет, как вчера», но вместо модели вида  будем считать, что будущее значение переменной зависит от среднего
будем считать, что будущее значение переменной зависит от среднего  её предыдущих значений, а значит, воспользуемся скользящей средней.
её предыдущих значений, а значит, воспользуемся скользящей средней.

Реализуем эту же функцию в питоне и посмотрим на прогноз, построенный по последнему наблюдаемому дню (24 часа)
def moving_average(series, n):
return np.average(series[-n:])
moving_average(dataset.Users, 24)Out: 29858.333333333332К сожалению, такой прогноз долгосрочным сделать не удастся — для получения предсказания на шаг вперед предыдущее значение должно быть фактически наблюдаемой величиной. Зато у скользящей средней есть другое применение — сглаживание исходного ряда для выявления трендов. В пандасе есть готовая реализация — DataFrame.rolling(window).mean(). Чем больше зададим ширину интервала — тем более сглаженным окажется тренд. В случае, если данные сильно зашумлены, что особенно часто встречается, например, в финансовых показателях, такая процедура может помочь с определением общих паттернов.
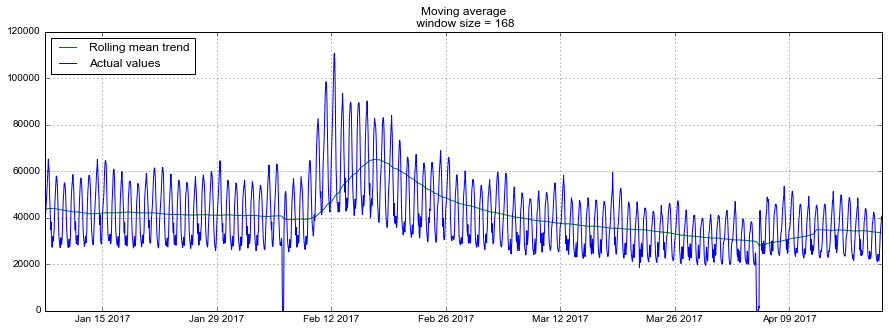
Для нашего ряда тренды и так вполне очевидны, но если сгладить по дням, становится лучше видна динамика онлайна по будням и выходным (выходные — время поиграть), а недельное сглаживание хорошо отражает общие изменения, связанные с резким ростом числа активных игроков в феврале и последующим снижением в марте.
def plotMovingAverage(series, n):
"""
series - dataframe with timeseries
n - rolling window size
"""
rolling_mean = series.rolling(window=n).mean()
# При желании, можно строить и доверительные интервалы для сглаженных значений
#rolling_std = series.rolling(window=n).std()
#upper_bond = rolling_mean+1.96*rolling_std
#lower_bond = rolling_mean-1.96*rolling_std
plt.figure(figsize=(15,5))
plt.title("Moving average\n window size = {}".format(n))
plt.plot(rolling_mean, "g", label="Rolling mean trend")
#plt.plot(upper_bond, "r--", label="Upper Bond / Lower Bond")
#plt.plot(lower_bond, "r--")
plt.plot(dataset[n:], label="Actual values")
plt.legend(loc="upper left")
plt.grid(True)plotMovingAverage(dataset, 24) # сглаживаем по дням
plotMovingAverage(dataset, 24*7) # сглаживаем по неделям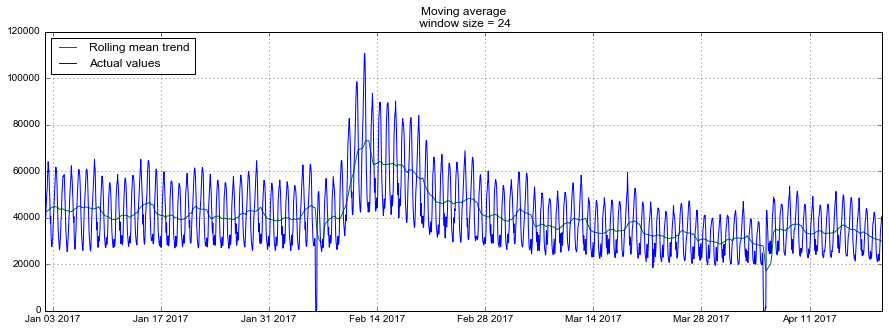
Модификацией простой скользящей средней является взвешенная средняя, внутри которой наблюдениям придаются различные веса, в сумме дающие единицу, при этом обычно последним наблюдениям присваивается больший вес.

def weighted_average(series, weights):
result = 0.0
weights.reverse()
for n in range(len(weights)):
result += series[-n-1] * weights[n]
return result
weighted_average(dataset.Users, [0.6, 0.2, 0.1, 0.07, 0.03])Out: 35967.550000000003Экспоненциальное сглаживание, модель Хольта-Винтерса
Простое экспоненциальное сглаживание
А теперь посмотрим, что произойдёт, если вместо взвешивания последних $n$ значений ряда мы начнем взвешивать все доступные наблюдения, при этом экспоненциально уменьшая веса по мере углубления в исторические данные. В этом нам поможет формула простого экспоненциального сглаживания:

Здесь модельное значение представляет собой средневзвешенную между текущим истинным и предыдущим модельным значениями. Вес  называется сглаживающим фактором. Он определяет, как быстро мы будем «забывать» последнее доступное истинное наблюдение. Чем меньше , тем больше влияния оказывают предыдущие модельные значения, и тем сильнее сглаживается ряд.
называется сглаживающим фактором. Он определяет, как быстро мы будем «забывать» последнее доступное истинное наблюдение. Чем меньше , тем больше влияния оказывают предыдущие модельные значения, и тем сильнее сглаживается ряд.
Экспоненциальность скрывается в рекурсивности функции — каждый раз мы умножаем  на предыдущее модельное значение, которое, в свою очередь, также содержало в себе , и так до самого начала.
на предыдущее модельное значение, которое, в свою очередь, также содержало в себе , и так до самого начала.
def exponential_smoothing(series, alpha):
result = [series[0]] # first value is same as series
for n in range(1, len(series)):
result.append(alpha * series[n] + (1 - alpha) * result[n-1])
return resultwith plt.style.context('seaborn-white'):
plt.figure(figsize=(20, 8))
for alpha in [0.3, 0.05]:
plt.plot(exponential_smoothing(dataset.Users, alpha), label="Alpha {}".format(alpha))
plt.plot(dataset.Users.values, "c", label = "Actual")
plt.legend(loc="best")
plt.axis('tight')
plt.title("Exponential Smoothing")
plt.grid(True)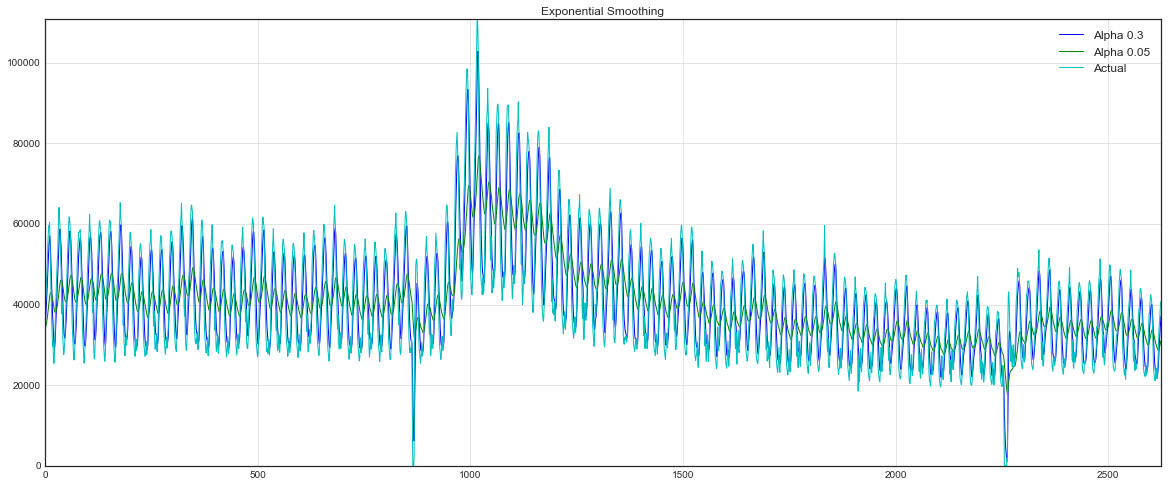
Двойное экспоненциальное сглаживание
До сих пор мы могли получить от наших методов в лучшем случае прогноз лишь на одну точку вперёд (и ещё красиво сгладить ряд), это здорово, но недостаточно, поэтому переходим к расширению экспоненциального сглаживания, которое позволит строить прогноз сразу на две точки вперед (и тоже красиво сглаживать ряд).
В этом нам поможет разбиение ряда на две составляющие — уровень (level, intercept)  и тренд
и тренд  (trend, slope). Уровень, или ожидаемое значение ряда, мы предсказывали при помощи предыдущих методов, а теперь такое же экспоненциальное сглаживание применим к тренду, наивно или не очень полагая, что будущее направление изменения ряда зависит от взвешенных предыдущих изменений.
(trend, slope). Уровень, или ожидаемое значение ряда, мы предсказывали при помощи предыдущих методов, а теперь такое же экспоненциальное сглаживание применим к тренду, наивно или не очень полагая, что будущее направление изменения ряда зависит от взвешенных предыдущих изменений.

В результате получаем набор функций. Первая описывает уровень — он, как и прежде, зависит от текущего значения ряда, а второе слагаемое теперь разбивается на предыдущее значение уровня и тренда. Вторая отвечает за тренд — он зависит от изменения уровня на текущем шаге, и от предыдущего значения тренда. Здесь в роли веса в экспоненциальном сглаживании выступает коэффициент  . Наконец, итоговое предсказание представляет собой сумму модельных значений уровня и тренда.
. Наконец, итоговое предсказание представляет собой сумму модельных значений уровня и тренда.
def double_exponential_smoothing(series, alpha, beta):
result = [series[0]]
for n in range(1, len(series)+1):
if n == 1:
level, trend = series[0], series[1] - series[0]
if n >= len(series): # прогнозируем
value = result[-1]
else:
value = series[n]
last_level, level = level, alpha*value + (1-alpha)*(level+trend)
trend = beta*(level-last_level) + (1-beta)*trend
result.append(level+trend)
return resultwith plt.style.context('seaborn-white'):
plt.figure(figsize=(20, 8))
for alpha in [0.9, 0.02]:
for beta in [0.9, 0.02]:
plt.plot(double_exponential_smoothing(dataset.Users, alpha, beta), label="Alpha {}, beta {}".format(alpha, beta))
plt.plot(dataset.Users.values, label = "Actual")
plt.legend(loc="best")
plt.axis('tight')
plt.title("Double Exponential Smoothing")
plt.grid(True)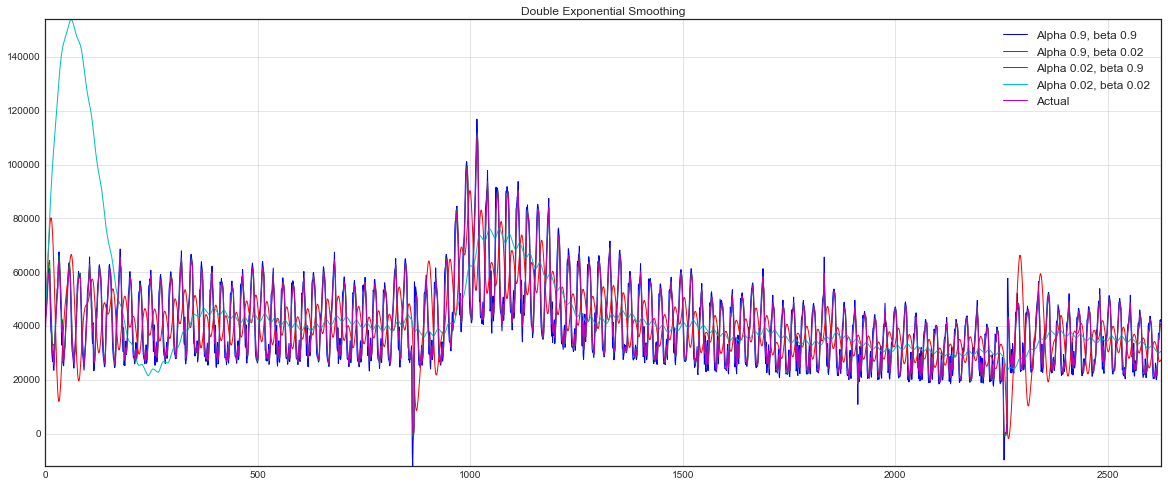
Теперь настраивать пришлось уже два параметра — и . Первый отвечает за сглаживание ряда вокруг тренда, второй — за сглаживание самого тренда. Чем выше значения, тем больший вес будет отдаваться последним наблюдениям и тем менее сглаженным окажется модельный ряд. Комбинации параметров могут выдавать достаточно причудливые результаты, особенно если задавать их руками. А о не ручном подборе параметров расскажу чуть ниже, сразу после тройного экспоненциального сглаживания.
Тройное экспоненциальное сглаживание a.k.a. Holt-Winters
Итак, успешно добрались до следующего варианта экспоненциального сглаживания, на сей раз тройного.
Идея этого метода заключается в добавлении еще одной, третьей, компоненты — сезонности. Соответственно, метод применим только в случае, если ряд этой сезонностью не обделён, что в нашем случае верно. Сезонная компонента в модели будет объяснять повторяющиеся колебания вокруг уровня и тренда, а характеризоваться она будет длиной сезона — периодом, после которого начинаются повторения колебаний. Для каждого наблюдения в сезоне формируется своя компонента, например, если длина сезона составляет 7 (например, недельная сезонность), то получим 7 сезонных компонент, по штуке на каждый из дней недели.
Получаем новую систему:

Уровень теперь зависит от текущего значения ряда за вычетом соответствующей сезонной компоненты, тренд остаётся без изменений, а сезонная компонента зависит от текущего значения ряда за вычетом уровня и от предыдущего значения компоненты. При этом компоненты сглаживаются через все доступные сезоны, например, если это компонента, отвечающая за понедельник, то и усредняться она будет только с другими понедельниками. Подробнее про работу усреднений и оценку начальных значений тренда и сезонных компонент можно почитать здесь. Теперь, имея сезонную компоненту, мы можем предсказывать уже не на один, и даже не на два, а на произвольные $m$ шагов вперёд, что не может не радовать.
Ниже приведен код для построения модели тройного экспоненциального сглаживания, также известного по фамилиям её создателей — Чарльза Хольта и его студента Питера Винтерса.
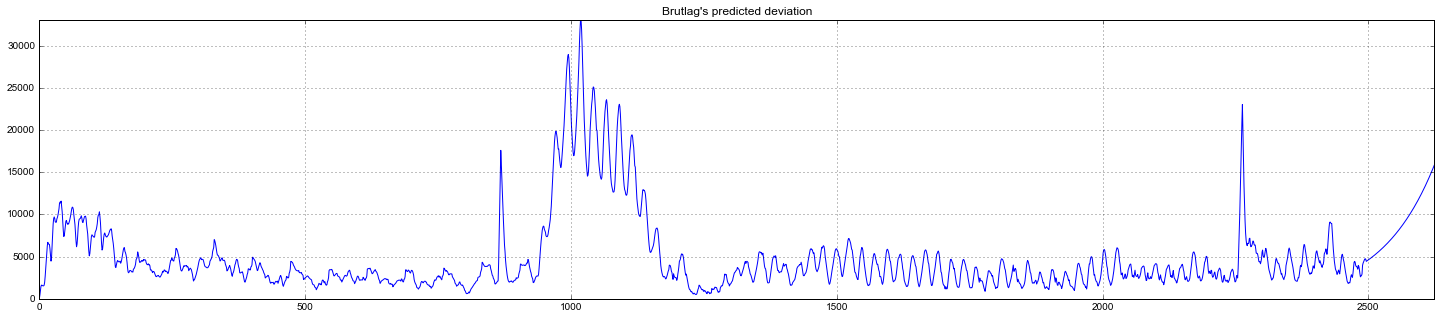
Дополнительно в модель включен метод Брутлага для построения доверительных интервалов:
$$display$$ \hat y_{max_x}=\ell_{x−1}+b_{x−1}+s_{x−T}+m⋅d_{t−T}\\ \hat y_{min_x}=\ell_{x−1}+b_{x−1}+s_{x−T}-m⋅d_{t−T}\\ d_t=\gamma∣y_t−\hat y_t∣+(1−\gamma)d_{t−T}, $$display$$
где  — длина сезона,
— длина сезона,  — предсказанное отклонение, а остальные параметры берутся из тройного сглаживани. Подробнее о методе и о его применении к поиску аномалий во временных рядах можно прочесть здесь
— предсказанное отклонение, а остальные параметры берутся из тройного сглаживани. Подробнее о методе и о его применении к поиску аномалий во временных рядах можно прочесть здесь
class HoltWinters:
"""
Модель Хольта-Винтерса с методом Брутлага для детектирования аномалий
https://fedcsis.org/proceedings/2012/pliks/118.pdf
# series - исходный временной ряд
# slen - длина сезона
# alpha, beta, gamma - коэффициенты модели Хольта-Винтерса
# n_preds - горизонт предсказаний
# scaling_factor - задаёт ширину доверительного интервала по Брутлагу (обычно принимает значения от 2 до 3)
"""
def __init__(self, series, slen, alpha, beta, gamma, n_preds, scaling_factor=1.96):
self.series = series
self.slen = slen
self.alpha = alpha
self.beta = beta
self.gamma = gamma
self.n_preds = n_preds
self.scaling_factor = scaling_factor
def initial_trend(self):
sum = 0.0
for i in range(self.slen):
sum += float(self.series[i+self.slen] - self.series[i]) / self.slen
return sum / self.slen
def initial_seasonal_components(self):
seasonals = {}
season_averages = []
n_seasons = int(len(self.series)/self.slen)
# вычисляем сезонные средние
for j in range(n_seasons):
season_averages.append(sum(self.series[self.slen*j:self.slen*j+self.slen])/float(self.slen))
# вычисляем начальные значения
for i in range(self.slen):
sum_of_vals_over_avg = 0.0
for j in range(n_seasons):
sum_of_vals_over_avg += self.series[self.slen*j+i]-season_averages[j]
seasonals[i] = sum_of_vals_over_avg/n_seasons
return seasonals
def triple_exponential_smoothing(self):
self.result = []
self.Smooth = []
self.Season = []
self.Trend = []
self.PredictedDeviation = []
self.UpperBond = []
self.LowerBond = []
seasonals = self.initial_seasonal_components()
for i in range(len(self.series)+self.n_preds):
if i == 0: # инициализируем значения компонент
smooth = self.series[0]
trend = self.initial_trend()
self.result.append(self.series[0])
self.Smooth.append(smooth)
self.Trend.append(trend)
self.Season.append(seasonals[i%self.slen])
self.PredictedDeviation.append(0)
self.UpperBond.append(self.result[0] +
self.scaling_factor *
self.PredictedDeviation[0])
self.LowerBond.append(self.result[0] -
self.scaling_factor *
self.PredictedDeviation[0])
continue
if i >= len(self.series): # прогнозируем
m = i - len(self.series) + 1
self.result.append((smooth + m*trend) + seasonals[i%self.slen])
# во время прогноза с каждым шагом увеличиваем неопределенность
self.PredictedDeviation.append(self.PredictedDeviation[-1]*1.01)
else:
val = self.series[i]
last_smooth, smooth = smooth, self.alpha*(val-seasonals[i%self.slen]) + (1-self.alpha)*(smooth+trend)
trend = self.beta * (smooth-last_smooth) + (1-self.beta)*trend
seasonals[i%self.slen] = self.gamma*(val-smooth) + (1-self.gamma)*seasonals[i%self.slen]
self.result.append(smooth+trend+seasonals[i%self.slen])
# Отклонение рассчитывается в соответствии с алгоритмом Брутлага
self.PredictedDeviation.append(self.gamma * np.abs(self.series[i] - self.result[i])
+ (1-self.gamma)*self.PredictedDeviation[-1])
self.UpperBond.append(self.result[-1] +
self.scaling_factor *
self.PredictedDeviation[-1])
self.LowerBond.append(self.result[-1] -
self.scaling_factor *
self.PredictedDeviation[-1])
self.Smooth.append(smooth)
self.Trend.append(trend)
self.Season.append(seasonals[i % self.slen])Кросс-валидация на временных рядах, подбор параметров
Перед тем, как построить модель, поговорим, наконец, о не ручной оценке параметров для моделей.
Ничего необычного здесь нет, по-прежнему сначала необходимо выбрать подходящуюю для данной задачи функцию потерь: RMSE, MAE, MAPE и др., которая будет следить за качеством подгонки модели под исходные данные. Затем будем оценивать на кросс-валидации значение функции потерь при данных параметрах модели, искать градиент, менять в соответствии с ним параметры и бодро опускаться в сторону глобального минимума ошибки.
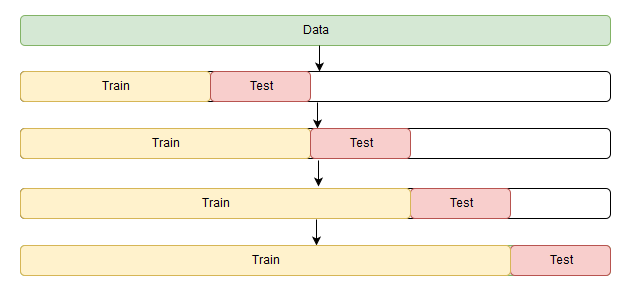
Небольшая загвоздка возникает только в кросс-валидации. Проблема состоит в том, что временной ряд имеет, как ни парадоксально, временную структуру, и случайно перемешивать в фолдах значения всего ряда без сохранения этой структуры нельзя, иначе в процессе потеряются все взаимосвязи наблюдений друг с другом. Поэтому придется использовать чуть более хитрый способ для оптимизации параметров, официального названия которому я так и не нашел, но на сайте CrossValidated, где можно найти ответы на всё, кроме главного вопроса Жизни, Вселенной и Всего Остального, предлагают название «cross-validation on a rolling basis», что не дословно можно перевести как кросс-валидация на скользящем окне.
Суть достаточно проста — начинаем обучать модель на небольшом отрезке временного ряда, от начала до некоторого  , делаем прогноз на
, делаем прогноз на  шагов вперед и считаем ошибку. Далее расширяем обучающую выборку до значения и прогнозируем с до
шагов вперед и считаем ошибку. Далее расширяем обучающую выборку до значения и прогнозируем с до  , так продолжаем двигать тестовый отрезок ряда до тех пор, пока не упрёмся в последнее доступное наблюдение. В итоге получим столько фолдов, сколько уместится в промежуток между изначальным обучающим отрезком и всей длиной ряда.
, так продолжаем двигать тестовый отрезок ряда до тех пор, пока не упрёмся в последнее доступное наблюдение. В итоге получим столько фолдов, сколько уместится в промежуток между изначальным обучающим отрезком и всей длиной ряда.
from sklearn.model_selection import TimeSeriesSplit
def timeseriesCVscore(x):
# вектор ошибок
errors = []
values = data.values
alpha, beta, gamma = x
# задаём число фолдов для кросс-валидации
tscv = TimeSeriesSplit(n_splits=3)
# идем по фолдам, на каждом обучаем модель, строим прогноз на отложенной выборке и считаем ошибку
for train, test in tscv.split(values):
model = HoltWinters(series=values[train], slen = 24*7, alpha=alpha, beta=beta, gamma=gamma, n_preds=len(test))
model.triple_exponential_smoothing()
predictions = model.result[-len(test):]
actual = values[test]
error = mean_squared_error(predictions, actual)
errors.append(error)
# Возвращаем средний квадрат ошибки по вектору ошибок
return np.mean(np.array(errors))Значение длины сезона 24×7 возникло не случайно — в исходном ряде отчетливо видна дневная сезонность, (отсюда 24), и недельная — по будням ниже, на выходных — выше, (отсюда 7), суммарно сезонных компонент получится 24×7.
В модели Хольта-Винтерса, как и в остальных моделях экспоненциального сглаживания, есть ограничение на величину сглаживающих параметров — каждый из них может принимать значения от 0 до 1, поэтому для минимизации функции потерь нужно выбирать алгоритм, поддерживающий ограничения на параметры, в данном случае — Truncated Newton conjugate gradient.
%%time
data = dataset.Users[:-500] # отложим часть данных для тестирования
# инициализируем значения параметров
x = [0, 0, 0]
# Минимизируем функцию потерь с ограничениями на параметры
opt = minimize(timeseriesCVscore, x0=x, method="TNC", bounds = ((0, 1), (0, 1), (0, 1)))
# Из оптимизатора берем оптимальное значение параметров
alpha_final, beta_final, gamma_final = opt.x
print(alpha_final, beta_final, gamma_final)Out: (0.0066342670643441681, 0.0, 0.046765204289672901)Передадим полученные оптимальные значения коэффициентов , и  и построим прогноз на 5 дней вперёд (128 часов)
и построим прогноз на 5 дней вперёд (128 часов)
# Передаем оптимальные значения модели,
data = dataset.Users
model = HoltWinters(data[:-128], slen = 24*7, alpha = alpha_final, beta = beta_final, gamma = gamma_final, n_preds = 128, scaling_factor = 2.56)
model.triple_exponential_smoothing()def plotHoltWinters():
Anomalies = np.array([np.NaN]*len(data))
Anomalies[data.values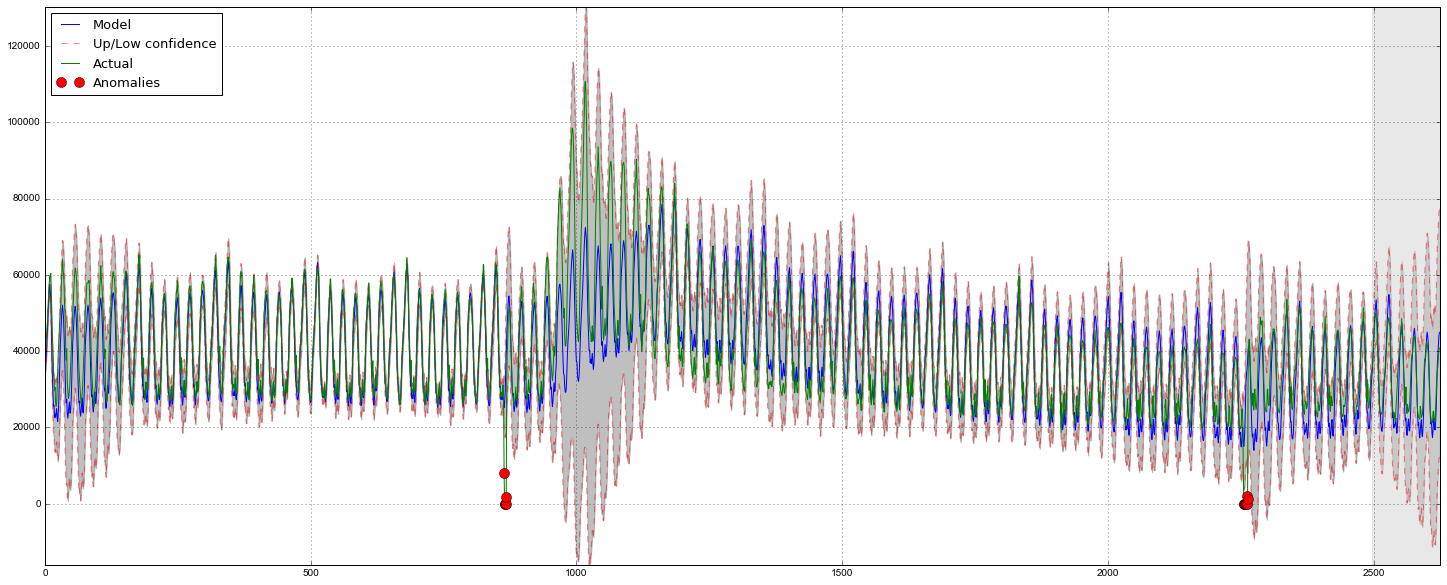
Судя по графику, модель неплохо описала исходный временной ряд, уловив недельную и дневную сезонность, и даже смогла поймать аномальные снижения, вышедшие за пределы доверительных интервалов. Если посмотреть на смоделированное отклонение, хорошо видно, что модель достаточно резко регирует на значительные изменения в структуре ряда, но при этом быстро возвращает дисперсию к обычным значениям, «забывая» прошлое. Такая особенность позволяет неплохо и без значительных затрат на подготовку-обучение модели настроить систему по детектированию аномалий даже в достаточно шумных рядах.
Эконометрический подход
Стационарность, единичные корни
Перед тем, как перейти к моделированию, стоит сказать о таком важном свойстве временного ряда, как стационарность.
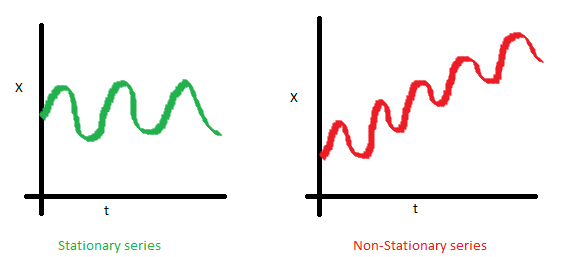
Под стационарностью понимают свойство процесса не менять своих статистических характеристик с течением времени, а именно постоянство матожидания, постоянство дисперсии (она же гомоскедастичность) и независимость ковариационной функции от времени (должна зависеть только от расстояния между наблюдениями). Наглядно можно посмотреть на эти свойства на картинках, взятых из поста Sean Abu:
- Временной ряд справа не является стационарным, так как его матожидание со временем растёт
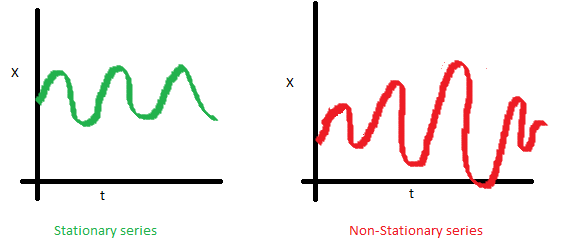
- Здесь не повезло с дисперсией — разброс значений ряда существенно варьируется в зависимости от периода
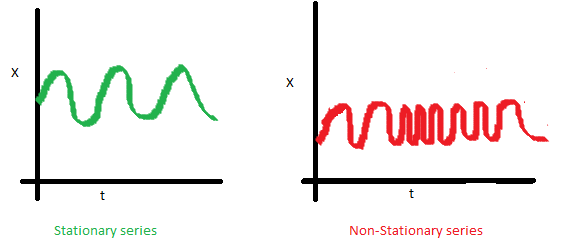
- Наконец, на последнем графике видно, что значения ряда внезапно становятся ближе друг ко другу, образуя некоторый кластер, а в результате получаем непостоянство ковариаций
Почему стационарность так важна? По стационарному ряду просто строить прогноз, так как мы полагаем, что его будущие статистические характеристики не будут отличаться от наблюдаемых текущих. Большинство моделей временных рядов так или иначе моделируют и предсказывают эти характеристики (например, матожидание или дисперсию), поэтому в случае нестационарности исходного ряда предсказания окажутся неверными. К сожалению, большинство временных рядов, с которыми приходится сталкиваться за пределыми учебных материалов, стационарными не являются, но с этим можно (и нужно) бороться.
Чтобы бороться с нестационарностью, нужно узнать её в лицо, потому посмотрим, как её детектировать. Для этого обратимся к белому шуму и случайному блужданию, чтобы выяснить как попасть из одного в другое бесплатно и без смс.
График белого шума:
white_noise = np.random.normal(size=1000)
with plt.style.context('bmh'):
plt.figure(figsize=(15, 5))
plt.plot(white_noise)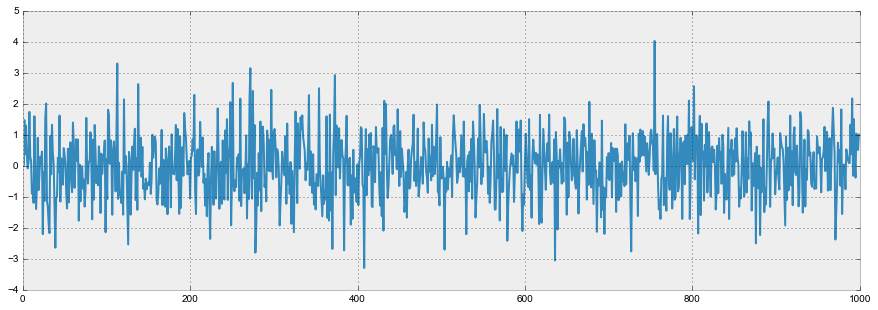
Итак, процесс, порожденный стандартным нормальным распределением, стационарен, колеблется вокруг нуля с отклонением в 1. Теперь на основании него сгенерируем новый процесс, в котором каждое последующее значение будет зависеть от предыдущего: 
def plotProcess(n_samples=1000, rho=0):
x = w = np.random.normal(size=n_samples)
for t in range(n_samples):
x[t] = rho * x[t-1] + w[t]
with plt.style.context('bmh'):
plt.figure(figsize=(10, 3))
plt.plot(x)
plt.title("Rho {}\n Dickey-Fuller p-value: {}".format(rho, round(sm.tsa.stattools.adfuller(x)[1], 3)))
for rho in [0, 0.6, 0.9, 1]:
plotProcess(rho=rho)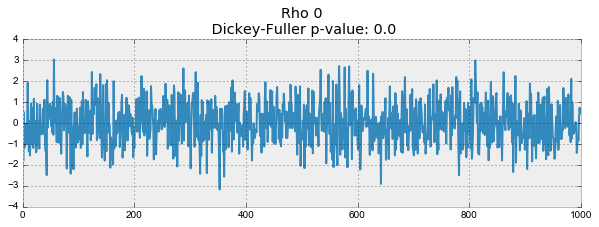
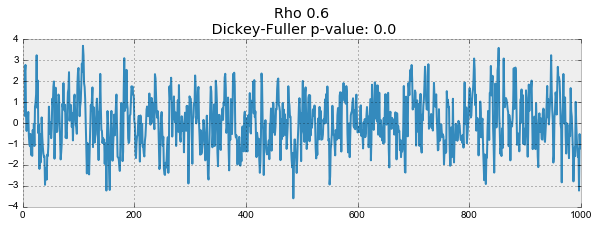
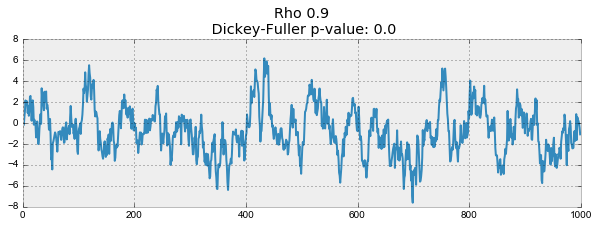
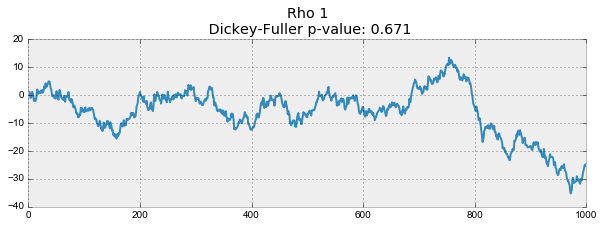
На первом графике получился точно такой же стационарный белый шум, который строился раньше. На втором значение  увеличилось до 0.6, в результате чего на графике стали появляться более широкие циклы, но в целом стационарным он быть пока не перестал. Третий график всё сильнее отклоняется от нулевого среднего значения, но всё ещё колеблется вокруг него. Наконец, значение равное единице дало процесс случайного блуждания — ряд не стационарен.
увеличилось до 0.6, в результате чего на графике стали появляться более широкие циклы, но в целом стационарным он быть пока не перестал. Третий график всё сильнее отклоняется от нулевого среднего значения, но всё ещё колеблется вокруг него. Наконец, значение равное единице дало процесс случайного блуждания — ряд не стационарен.
Происходит это из-за того, что при достижении критической единицы, ряд перестаёт возвращаться к своему среднему значению. Если вычесть из левой и правой части  , то получим
, то получим  , где выражение слева — первые разности. Если
, где выражение слева — первые разности. Если  , то первые разности дадут стационарный белый шум
, то первые разности дадут стационарный белый шум  . Этот факт лёг в основу теста Дики-Фуллера на стационарность ряда (наличие единичного корня). Если из нестационарного ряда первыми разностями удаётся получить стационарный, то он называется интегрированным первого порядка. Нулевая гипотеза теста — ряд не стационарен, отвергалась на первых трех графиках, и принялась на последнем. Стоит сказать, что не всегда для получения стационарного ряда хватает первых разностей, так как процесс может быть интегрированным с более высоким порядком (иметь несколько единичных корней), для проверки таких случаев используют расширенный тест Дики-Фуллера, проверяющий сразу несколько лагов.
. Этот факт лёг в основу теста Дики-Фуллера на стационарность ряда (наличие единичного корня). Если из нестационарного ряда первыми разностями удаётся получить стационарный, то он называется интегрированным первого порядка. Нулевая гипотеза теста — ряд не стационарен, отвергалась на первых трех графиках, и принялась на последнем. Стоит сказать, что не всегда для получения стационарного ряда хватает первых разностей, так как процесс может быть интегрированным с более высоким порядком (иметь несколько единичных корней), для проверки таких случаев используют расширенный тест Дики-Фуллера, проверяющий сразу несколько лагов.
Бороться с нестационарностью можно множеством способов — разностями различного порядка, выделением тренда и сезонности, сглаживаниями и преобразованиями, например, Бокса-Кокса или логарифмированием.
Избавляемся от нестационарности и строим SARIMA
Попробуем теперь построить ARIMA модель для онлайна игроков, пройдя все круги ада стадии приведения ряда к стационарному виду. Про саму модель уже не раз писали на хабре — Построение модели SARIMA с помощью Python+R, Анализ временных рядов с помощью python, поэтому подробно останавливаться на ней не буду.
def tsplot(y, lags=None, figsize=(12, 7), style='bmh'):
if not isinstance(y, pd.Series):
y = pd.Series(y)
with plt.style.context(style):
fig = plt.figure(figsize=figsize)
layout = (2, 2)
ts_ax = plt.subplot2grid(layout, (0, 0), colspan=2)
acf_ax = plt.subplot2grid(layout, (1, 0))
pacf_ax = plt.subplot2grid(layout, (1, 1))
y.plot(ax=ts_ax)
ts_ax.set_title('Time Series Analysis Plots')
smt.graphics.plot_acf(y, lags=lags, ax=acf_ax, alpha=0.5)
smt.graphics.plot_pacf(y, lags=lags, ax=pacf_ax, alpha=0.5)
print("Критерий Дики-Фуллера: p=%f" % sm.tsa.stattools.adfuller(y)[1])
plt.tight_layout()
return
tsplot(dataset.Users, lags=30)Out: Критерий Дики-Фуллера: p=0.190189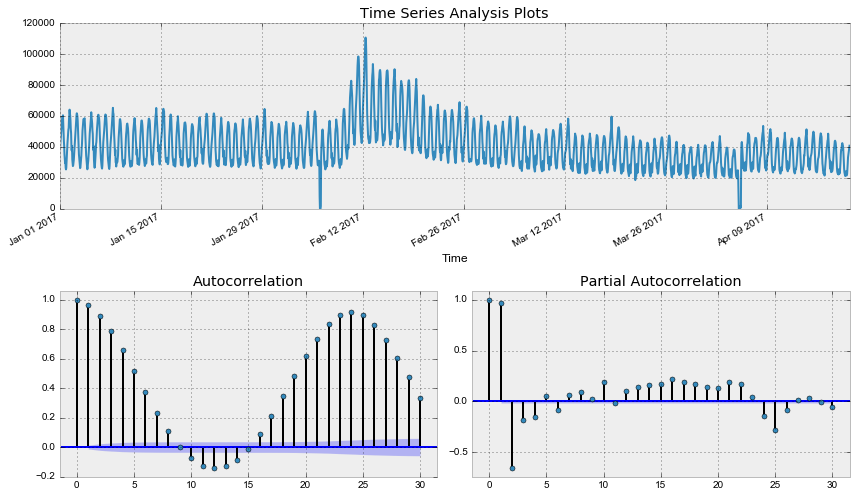
Как и следовало ожидать, исходный ряд стационарным не является, критерий Дики-Фуллера не отверг нулевую гипотезу о наличии единичного корня. Попробуем стабилизировать дисперсию преоразованием Бокса-Кокса.
def invboxcox(y,lmbda):
# обрабтное преобразование Бокса-Кокса
if lmbda == 0:
return(np.exp(y))
else:
return(np.exp(np.log(lmbda*y+1)/lmbda))
data = dataset.copy()
data['Users_box'], lmbda = scs.boxcox(data.Users+1) # прибавляем единицу, так как в исходном ряде есть нули
tsplot(data.Users_box, lags=30)
print("Оптимальный параметр преобразования Бокса-Кокса: %f" % lmbda)Out: Критерий Дики-Фуллера: p=0.079760
Оптимальный параметр преобразования Бокса-Кокса: 0.587270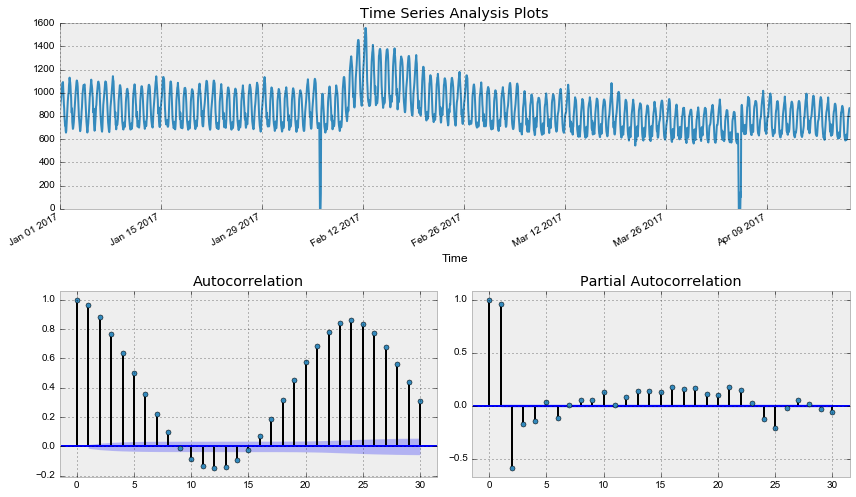
Уже лучше, однако критерий Дики-Фуллера по-прежнему не отвергает гипотезу о нестационарности ряда. А автокорреляционная функция явно намекает на сезонность в получившемся ряде. Возьмём сезонные разности:
data['Users_box_season'] = data.Users_box - data.Users_box.shift(24*7)
tsplot(data.Users_box_season[24*7:], lags=30)Out: Критерий Дики-Фуллера: p=0.002571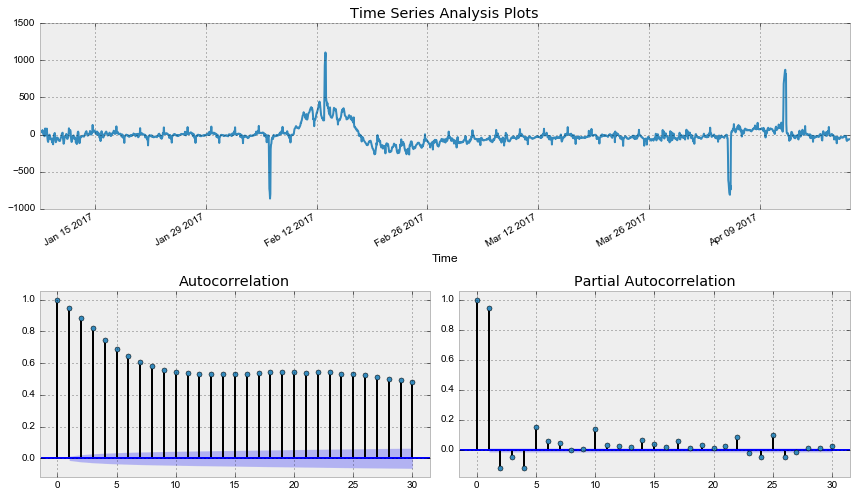
Критерий Дики-Фуллера теперь отвергает нулевую гипотезу о нестационарности, но автокорреляционная функция всё ещё выглядит нехорошо из-за большого числа значимых лагов. Так как на графике частной автокорреляционной функции значим лишь один лаг, стоит взять еще первые разности, чтобы привести наконец ряд к стационарному виду.
data['Users_box_season_diff'] = data.Users_box_season - data.Users_box_season.shift(1)
tsplot(data.Users_box_season_diff[24*7+1:], lags=30)Out: Критерий Дики-Фуллера: p=0.000000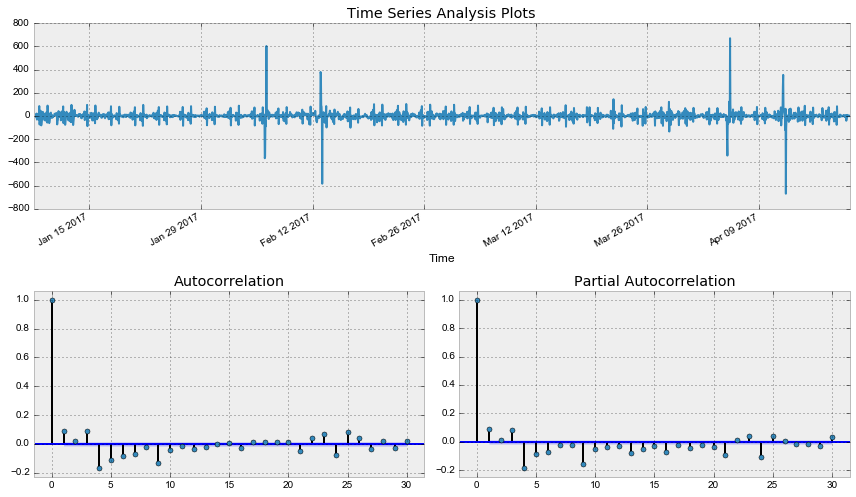
Наконец, получили стационарный ряд, по автокорреляционной и частной автокорреляционной функции прикинем параметры для SARIMA модели, на забыв, что предварительно уже сделали первые и сезонные разности.
Начальные приближения Q = 1, P = 4, q = 3, p = 4
ps = range(0, 5)
d=1
qs = range(0, 4)
Ps = range(0, 5)
D=1
Qs = range(0, 1)
from itertools import product
parameters = product(ps, qs, Ps, Qs)
parameters_list = list(parameters)
len(parameters_list)Out: 100%%time
results = []
best_aic = float("inf")
for param in tqdm(parameters_list):
#try except нужен, потому что на некоторых наборах параметров модель не обучается
try:
model=sm.tsa.statespace.SARIMAX(data.Users_box, order=(param[0], d, param[1]),
seasonal_order=(param[3], D, param[3], 24*7)).fit(disp=-1)
#выводим параметры, на которых модель не обучается и переходим к следующему набору
except ValueError:
print('wrong parameters:', param)
continue
aic = model.aic
#сохраняем лучшую модель, aic, параметры
if aic < best_aic:
best_model = model
best_aic = aic
best_param = param
results.append([param, model.aic])
warnings.filterwarnings('default')
result_table = pd.DataFrame(results)
result_table.columns = ['parameters', 'aic']
print(result_table.sort_values(by = 'aic', ascending=True).head())Лучшие параметры загоняем в модель:
%%time
best_model = sm.tsa.statespace.SARIMAX(data.Users_box, order=(4, d, 3),
seasonal_order=(4, D, 1, 24)).fit(disp=-1)
print(best_model.summary()) Statespace Model Results
==========================================================================================
Dep. Variable: Users_box No. Observations: 2625
Model: SARIMAX(4, 1, 3)x(4, 1, 1, 24) Log Likelihood -12547.157
Date: Sun, 23 Apr 2017 AIC 25120.315
Time: 02:06:39 BIC 25196.662
Sample: 0 HQIC 25147.964
- 2625
Covariance Type: opg
==============================================================================
coef std err z P>|z| [0.025 0.975]
------------------------------------------------------------------------------
ar.L1 0.6794 0.108 6.310 0.000 0.468 0.890
ar.L2 -0.0810 0.181 -0.448 0.654 -0.435 0.273
ar.L3 0.3255 0.137 2.371 0.018 0.056 0.595
ar.L4 -0.2154 0.028 -7.693 0.000 -0.270 -0.161
ma.L1 -0.5086 0.106 -4.784 0.000 -0.717 -0.300
ma.L2 -0.0673 0.170 -0.395 0.693 -0.401 0.267
ma.L3 -0.3490 0.117 -2.976 0.003 -0.579 -0.119
ar.S.L24 0.1023 0.012 8.377 0.000 0.078 0.126
ar.S.L48 -0.0686 0.021 -3.219 0.001 -0.110 -0.027
ar.S.L72 0.1971 0.009 21.573 0.000 0.179 0.215
ar.S.L96 -0.1217 0.013 -9.279 0.000 -0.147 -0.096
ma.S.L24 -0.9983 0.045 -22.085 0.000 -1.087 -0.910
sigma2 873.4159 36.206 24.124 0.000 802.454 944.378
===================================================================================
Ljung-Box (Q): 130.47 Jarque-Bera (JB): 1194707.99
Prob(Q): 0.00 Prob(JB): 0.00
Heteroskedasticity (H): 1.40 Skew: 2.65
Prob(H) (two-sided): 0.00 Kurtosis: 107.88
===================================================================================
Warnings:
[1] Covariance matrix calculated using the outer product of gradients (complex-step).Проверим остатки модели:
tsplot(best_model.resid[24:], lags=30)Out: Критерий Дики-Фуллера: p=0.000000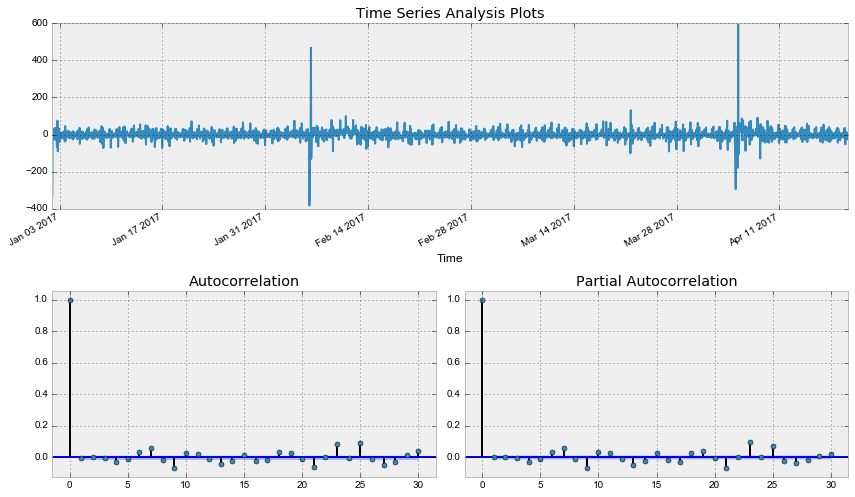
Что ж, остатки стационарны, явных автокорреляций нет, построим прогноз по получившейся модели
data["arima_model"] = invboxcox(best_model.fittedvalues, lmbda)
forecast = invboxcox(best_model.predict(start = data.shape[0], end = data.shape[0]+100), lmbda)
forecast = data.arima_model.append(forecast).values[-500:]
actual = data.Users.values[-400:]
plt.figure(figsize=(15, 7))
plt.plot(forecast, color='r', label="model")
plt.title("SARIMA model\n Mean absolute error {} users".format(round(mean_absolute_error(data.dropna().Users, data.dropna().arima_model))))
plt.plot(actual, label="actual")
plt.legend()
plt.axvspan(len(actual), len(forecast), alpha=0.5, color='lightgrey')
plt.grid(True)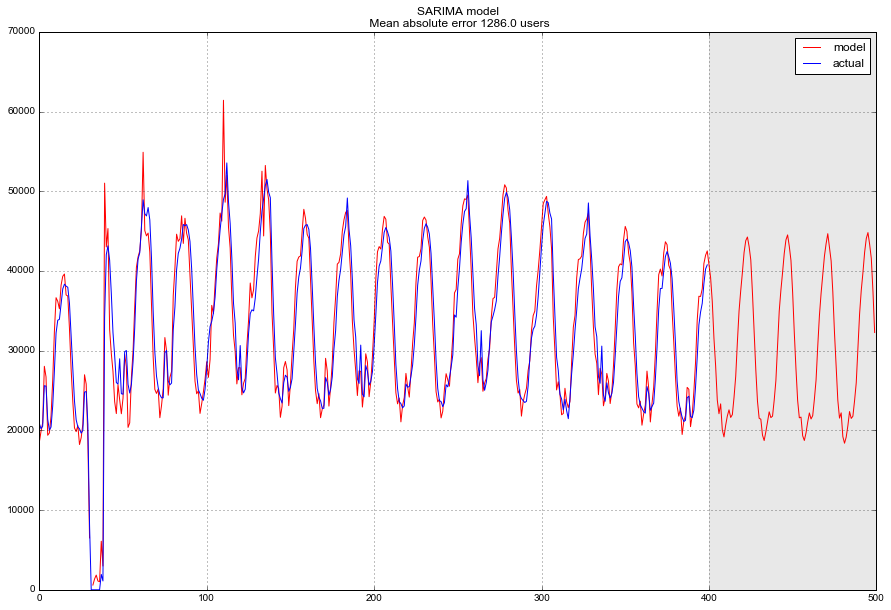
В финале получаем достаточно адекватный прогноз, в среднем модель ошибалась на 1.3 K пользователей, что очень и очень неплохо, однако суммарные затраты на подготовку данных, приведение к стационарности, определение и перебор параметров могут такой точности и не стоить.
Линейные и не очень модели на временных рядах
Снова небольшое лирическое отступление. Часто на работе приходится строить модели, руководствуясь одним основополагающим принципом — быстро, качественно, недорого. Поэтому часть моделей могут банально не подойти для «продакшн-решений», так как либо требуют слишком больших затрат по подготовке данных (например, SARIMA), либо сложно настраиваются (хороший пример — SARIMA), либо требуют частого переобучения на новых данных (опять SARIMA), поэтому зачастую гораздо проще бывает выделить несколько признаков из имеющегося временного ряда и построить по ним обычную линейную регрессию или навесить решаюший лес. Дешево и сердито.
Возможно, этот подход не является значительно подкрепленным теорией, нарушает различные предпосылки, например, условия Гаусса-Маркова, особенно пункт про некоррелированность ошибок, однако на практике нередко выручает и достаточно
