Непромокаемый компьютер из 1960 года
Знаете ли вы, как летают ракеты? Конечно, ответите вы: «Элементарно, по траектории».
Безусловно, есть люди, которые и сейчас в уме посчитают траекторию с учетом места старта, известных параметров скорости и ускорения, внесут поправки на вращение Земли и ее несферичность. Это если мы говорим о простой методике, известной как Q-guidance. Но такие уникумы редкость, и было бы тяжело рассчитывать на то, что каждая пусковая установка может быть укомплектована таким гением (как Эндрю Джексон «Калькулятор» Либби). А если перед нами встанет задача произвести пуск с движущейся платформы, добавится еще пригорошня вводных для вычислений. Сразу усложню — вся установка будет под водой.
А теперь мы поговорим о конкретике, выраженной в железе: реализация расчетов для ракет «Поларис» в США в середине XX века. Вас ждут технологии, достойные таинственных дворфов.

Компоновка ракеты Polaris A1. Указан отсек для умного оборудования.
Из воспоминаний Рэймонда Хьюи (Hughey Raymond), одного из разработчиков системы наведения ракеты «Поларис»:
«Траектория полета ракеты рассчитывалась вручную. Вначале для тестового полета она просчитывалась вручную, от начала и до конца. Составлялась номинальная траектория и находилась точка отделения [головной части], которая давала вам точное расстояние для поражения цели, для этой точки бралось ускорение, это было то ускорение на котором отрубалась тяга, и необходимо было вставить полученные вычисления данных на стартовой площадке».
Надо было как-то автоматизировать процесс, и в помощь ракетчикам пришла программа расчета траектории, которую вычисляли на новом компьютере, принадлежащему Артиллерийскому управлению ВМС США.
«Для флота США эта была первая компьютеризированная программа. Расчеты производились NORC (Naval Ordnance Research Calculator), которая была построена IBM по заказу флота. Это была огромная машина. Она была самым быстродействующим компьютером на тот момент и была одной из новых больших машин от IBM. Именно этот компьютер давал нам преимущество, позволяя просчитывать траектории по указанным параметрам».

NORC на испытательном полигоне военно-морских сил США, Далгрен, Вирджиния, около 1957 года
Указанный NORC — это первый суперкомпьютер, построенный по заказу Артиллерийского Управления Флота США, с 1954 по 1963 год самый мощный компьютер, эксплуатировался с 1954 по 1968 год. Стоимость — 2,5 миллиона долларов США, сметная прибыль IBM — 1 доллар. Чтобы вы оценили, американская подводная лодка конца Второй Мировой стоила около 4,5 миллионов долларов. Несмотря на его сложность, 92 процента времени из 14 лет компьютер работал постоянно, что является достойным показателем даже для более поздних машин.
«Вторым преимуществом был доктор Чарльз Коэн, профессор из Далгрена. Именно он первым предположил что гравитационная составляющая позволит составлять точную траекторию для дальнобойной ракеты. До этого расчет траектории просто показывал куда примерно упадет ракета. Он составил гравитационную модель, мы ее описали, и в результате эта модель используется по всему миру и сейчас»
.
То есть использовался расчет гравитационного поля Земли для определения траектории, основанный на принятии модели геоида с гравитационными отклонениями, влияющими на траекторию полета ракеты. 1960 год, напомню.
В общем, казалось бы — проблем обозначена, инструментарий есть. За чем же стало дело?
«Проблема была в том, что у нас в ракете не было места для мощного компьютера. И у нас было всего 32 кб памяти на борту»
К примеру, наземная ракета США MINUTEMAN была укомплектована компьютером наведения на транзисторах с процессор 12,8 кГц и памятью объемом в 5454 24-битных слова на магнитном диске. И это при том, что требования к наземной пусковой предъявлялись меньше по массогабаритам.

МБР Minuteman-1A (FTM-410) на тестовой площадке LC-31B, мыс Канаверал, 1962 год
Но тут еще возникает вопрос получения стартовых параметров. Если расчетные параметры твердотопливных двигателей будут постоянно одинаковые (и нам известны), то вот проблема расчета траектории от стартовой точки сохраняется. Если пуск наземной ракеты производится по известным заранее параметрам (пусковые шахты не очень мобильны, знаете ли, и редко перемещаются), то вот с подводной лодкой все сложнее. Необходимо было рассчитать все возможные траектории пуска для района патрулирования.
Получается так, что корабельная инерционная навигационная система (SINS) была важна для навигации подводных лодок, которые должны были действовать без постоянной привязки к внешним ориентирам, и, как мы видим, для стрельбы ракетами. Временна́я задержка между радионавигацией и данными со спутников, расчет данных для стрельбы — все это должно было быть сделано быстро и точно. Первые инерциальные гироскопические навигаторы начали строить в 1950-м году по заказу флота, где гироскопы и акселерометры сохраняли ориентацию ракеты (причём уже тогда по Солнцу и звездам) с минимальной погрешностью.
К 1959 году был уже утверждена система с 4 гироскопами (3 рабочих, четвертый для компенсации ошибок), MK2 SINS (в модификациях от MOD1 до MOD7). Она была очень продвинута для своего времени: уже использовала для работы диоды типа «кошачий ус», дискретные транзисторные схемы, память на магнитном барабане. Довольно удивительно, что эти устройства дожили до лодок с четвертым поколением ракет — «Трайдент», и одна из них, USS Alaska — до сих пор в строю. Какая архаика до сих пор служит, воскликнете вы, но военные вам ответят — «Работает — не лезь!»
Кстати, если вы сейчас обратили внимание на то, что в 1959-м году уже используются спутники (полноценно функционировать система стала в 1964, не переживайте). Это система Транзит, которая появилась после нашего «Спутника-1».
Итак, когда ракета запускалась к цели, данные наведения (рассчитываемые по точке запуска, пункта назначения и желательной характеристики траектории) должны были быть загружены в ракету. Поскольку ракета запускалась с движущейся платформы, данные наведения должны были корректироваться в реальном времени в зависимости от навигационных данных. Но вот технологии не успевали за таким решением, как мы видим, не было настолько мощных средств вычисления. Были предложены карточки цели (target card), которые включали в себя данные для пуска в зависимости от района старта и списка целей. То, о чем мы говорили выше.
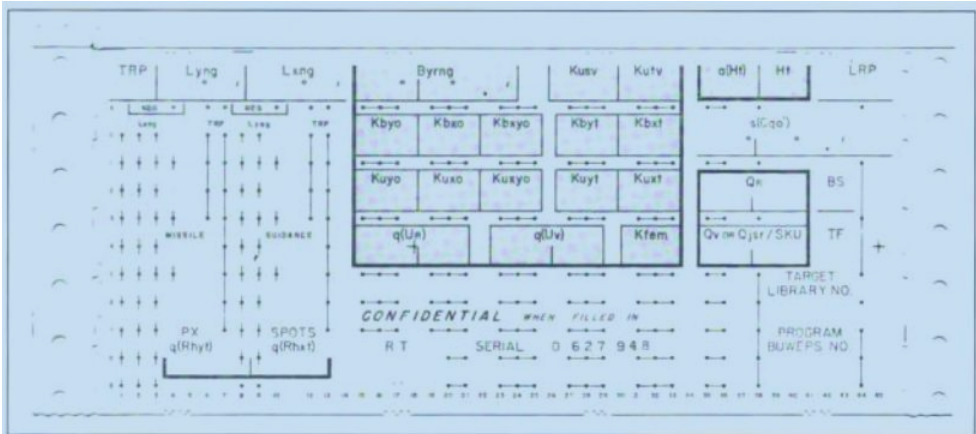
Когда лодка USS George Washington 15 ноября 1960 года вышла на свое первое патрулирование, у неё на борту было 300 000 (триста тысяч) таких карточек.
Предположим, отыскать нужную карточку на борту действительно будет быстрым делом. Но вопрос, откуда получить стартовые данные для карточек? Ведь если мы ошибемся на один градус, погрешность составит столько, что нас уже не спасут даже термоядерные заряды россыпью.
Система должна была работать так: лодка всплывала в позиционное положение (выставляя антенны наружу), приемник General Electric получал данные от спутников (система Транзит), вносил их в компьютер, который также получал данные от инерциальной навигационной системы, широту и долготу. Используя эту информацию и обрабатывая входящую навигационную информацию методом наименьших квадратов, AN/UYK-1 выдавал данные в течение 15 минут.
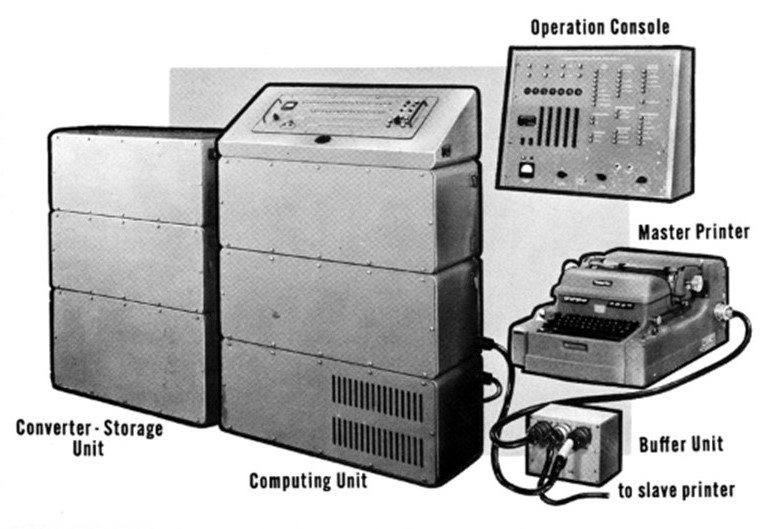
Тут неплохо бы задать себе вопрос — ведь компьютеры пятидесятых годов это что-то огромное? Компьютер собирали из запчастей внутри лодки (она атомная, проблем с электричеством особо не будет)? Это было как-то просто реализовано?
Вот уж нет. Это был компьютер, который можно было пропихнуть в люк подлодки. Поскольку это был военно-морской компьютер, то он был водонепроницаемый.
Память у него была на 8192 слова, 16 битная. Цикл обрабатывался за микросекунду. Весил этот компьютер 250 килограмм. Должен отметить, что в рекламе говорится о его относительной дешевизне. В целом, 73 430 долларов за компьютер после двух миллионов за «супер» от IBM — относительно дешево.
Цены в 1959 году:
House: $10,900
Average income: $5,016
Ford car: $2,132-$3,979
Milk: $1.01
Gas: $.25
Bread $.20
Посчитаем в Кадиллаках, который стоил с 4000 до 7500 тысяч долларов. Это от 10 до 18 Кадиллаков за 1 компьютер. Переводя в нынешние Кадиллак Эскалейды, которые стоят за 1 штуку 77–110 тысяч долларов, а в рублях 18–29 миллионов рублей, получаем (по курсу 10 Кадиллаков) 1 миллион 100 тысяч долларов или 290 миллионов рублей

Как и 500 лет назад моряки везут в лодке сундук, стоящий целое состояние. В двух других сундуках на носу и корме — софт
Причем не надо думать что карточки цели были нужны для красоты или чтоб на борту было что почитать. Они были нужны для ввода данных в систему управления огнем (ракетами) Mk.80, которая и говорила ракете какой траекторией лететь от квадрата старта (квадрат патрулирования) до цели. А вот все эти траектории были уже просчитаны как раз «на берегу», потому что компьютер только так NORC мог хоть как-то упростить жизнь подводникам, и другого варианта не было. До эры по настоящему портативной вычислительной техники было еще далековато.
Таким образом, стандартным навигационным оборудованием для лодок Полариса были: система инерциальной навигации, электромагнитное отслеживание скорости воды (привязанное для внесения поправок в инерциальную систему); приемник системы Лоран-С; приемник системы «Транзит»; перископ тип 11 (астронавигационный, для определения местоположения по звездам), и сонар (для изучения рельефа дна и соотнесения данных с картами). Все это обрабатывалось двумя NAVDAC компьютерами (Navigation Data Assimilation Computer), основным и резервным.
Вся эта красота имела внутренние ошибки, конечно. Да и к тому же вы помните, что гравитация не является константой, и меняется в зависимости от окружения, пусть и по отрицательному значению высоты. Понятно, что какие-то ошибки можно было просчитать, откорректировать вручную, но иногда персонал просто нежно дышал в сторону техники, надеясь, что ошибки взаимоскомпенсируются.
Как вы понимаете, это был хайтек для тех лет, и он чаще всего срабатывал. Вы спросите, а какие были конечные результаты и на что рассчитывали? В первой итерации планировали что круговое вероятное отклонение составит 4 километра на максимальной дальности, в полигонных пусках получали около полутора километров. Но, как мы знаем, практика — критерий истины и в 1962 году произошло единственное практическое испытание ракеты «Поларис» с ядерной боеголовкой. 6 мая 1962 года с борта лодки «Этан Аллен» (SSBN 608) в рамках операции «Птица фрегат» (Frigate Bird) был произведен запуск ракеты А1 по острову Рождества с термоядерной боеголовкой W-47Y1 мощностью 600 килотонн. Боеголовка взорвалась в 2 километрах от точки прицеливания на высоте 3400 метров (отклонение по высоте подрыва не укладывается в параметры нижеследующего графика поражения, что дает нам возможность предположить что она не была в списке заданных параметров).

Это показывает нам что теория теорией, а практика отставала от поставленной цели, хотя и опережала худшие расчеты. А так, конечно, траекторию считать просто.
«Я был на разных лодках США, по поводу ракет, но никогда не был в реакторном отсеке. А когда работал с британцами, то на их лодке они устроили мне экскурсию и показали все. Они показали мне реактор, как он работает, и как вообще все устроено, и я подумал, как интересно что я это увидел у другой страны, а в своей посмотреть не мог»
«Это был компьютер на реле (relay calculator) [видимо речь идет о Aiken Mark II, которые использовались в лаборатории Далгрена, а потом были переданы в Гарвард] и однажды вечером [в Гарварде] он остановился, и Билл Берк пришел и обнаружил, что мотылек (moth) попал в реле, и это вызвало остановку компьютера. Он удалил насекомое, перезапустил машину и записал, что он нашел жука в машине, избавился от него и компьютер снова заработал (logged that he«d found the bug in the machine, and debugged it, and it was running again)»