Навигация под водой: пеленгуй — не пеленгуй, обречен ты на успех
Первая коммерчески доступная отечественная подводная акустическая навигационная УКБ-система
Мы не теряем темп. C момента публикации нашей предыдущей статьи Подводный GPS: продолжение прошло почти целое лето и сегодня я расскажу, чем мы занимались все это время.
В первой статье про наш подводный GPS мы делали краткий обзор существующих систем позиционирования и подводных акустических в частности.
Под катом я расскажу о том, как мы сделали ультракороткобазисную систему.
Итак, в 2015-ом году мы зареклись когда-либо заниматься УКБ (USBL — ultrashort base-line) системами. Суть данных систем в наличии источника сигнала (маяк-ответчик, например) и антенны, определяющей направление прихода сигнала. Фазированная антенная решетка или попросту: пеленгационная антенна.
Многие все наши пользователи так или иначе высказывались об относительном неудобстве процедуры расстановки буев, и того, что координаты вырабатываются «внизу» (как в нашем подводном GPS).
Иногда всегда хочется прикрутить к позиционируемому объекту (водолазу или ТНПА/АНПА) маячок и определять местоположение относительно надводного пункта управления (катер, пирс и т. п.) опуская в воду USBL-антенну. С точки зрения простоты развёртывания — это самая удобная и простая система. например, упомянутый в нашей первой статье MicronNAV — это типичная USBL-система, а также вот эта. Печально известный сказочный NaviMate по идее тоже планировался как УКБ-система: один плавучий буй должен пеленговать водолазов, вычислять их абсолютное местоположение и передавать его им обратно.
Пеленгационная антенна штука довольно распространенная. Так, например, у подводных лодок есть конформные антенные решетки, содержащие тысячи отдельных преобразователей. Конечно, нельзя сказать, что до нас УКБ систем в РФ никто не делал. Однако, насколько нам известно, наша является первой отечественной системой, доступной коммерчески (и вообще самой доступной!).
Но ничего в этой вселенной не бывает бесплатно. За удобство приходится платить. Как говорит наш коллега, разработавший алгоритм работы системы пеленгования и являющийся автором прошивки пеленгационной антенны:
«Пользователь УКБ будет радоваться простоте развертывания…. первые 10–15 минут. Как раз столько, сколько бы потребовалось для расстановки буев длиннобазисной системы на акватории».
Дело в том, что ошибка в оценке времени прихода на 1–2 метра в длиннобазисной системе особой погоды не сделает, поскольку ± 1 метр вполне допустимая ошибка в задачах позиционирования водолазов или роботов.
Ошибка же в определении «первого» или «прямого» луча, в случае УКБ системы, приведет к определению направления прихода какого-то отражения (или суммы отражений — «лучей»), а прийти оно может откуда угодно, все зависит от конкретной акватории. Особенно сильно это сказывается на определении вертикального угла. Поймать отражение от поверхности или ото дна и вот уже у вас разброс значений в диапазоне 90 градусов, а это так себе система навигации.
В современных системах (и в нашей тоже) вертикальный угол не учитывается. Вместо этого маяк-ответчик имеет встроенный датчик глубины и может по запросу пеленгационной антенны передавать свою глубину. Дальше, зная разность глубин и наклонную дальность, дистанция по поверхности определяется тривиально из теоремы Пифагора.
Плюс ко всему отдельно стоит задача позиционирования самой антенны. Будучи спущенной на кабеле с судна обеспечения или с пирса, ее болтает и крутит волнами и течением. Соответственно, если угол прихода сигнала определяется в системе координат антенны, а она нестабильна, то эта нестабильность переходит в вычисляемое местоположение позиционируемого объекта.
Часто для избежания подобных проблем антенну крепят на штанге. Мы тоже так делаем, хотя наша антенна и имеет встроенный AHRS.
Мы назвали свою систему Zima. в ближайшее время планируем выпустить улучшенный вариант под названием Zima blizko
Наша система состоит из самой пеленгационной приемопередающей антенны Zima-B (ase). Ее видно на фото ниже.

Рисунок 1 — Zima-B — пеленгационная антенна, закрепленная на штанге
И маяков-ответчиков Zima-R (esponder), которые могут быть как автономными, комплектующимися батарейным блоком (как на фото), так и сопрягаемыми с носителем.
В этом случае пользователю становятся доступны все наши нововведения и приятности:
— возможность передачи до 32 команд телеуправления
— взаимное измерение дистанции до пеленгационной антенны
— передача азимута на базовую станцию (если на носителе есть прибор, определяющий направление на север — компас в простонародье)
Маяк-ответчик в том же форм-факторе, что и наш приемник подводного GPS — RedNODE. Как уже упоминалось, он имеет встроенный датчик давления/температуры на диапазон 0–30 Бар и позволяет получить точность до 0.05 м по глубине и до 0.1 градуса по температуре. Антенна, кстати, тоже снабжена таким же датчиком, потому что измерять глубину по кабелю это как-то не инновационно.

Рисунок 2 — Zima-R — маяк ответчик (с батарейным блоком)
Генеральное тестирование системы мы проводили 3 августа этого года на реке Пичуга в Волгоградской области, рядом с местом, где она впадает в волгоградское водохранилище. Это наш любимый «полигон», все ямки и элементы профиля знаем в лицо.
В конце июля и начале августа обычно стоит очень жаркая погода. На водоемах появляется прогретый верхний слой (возникает термоклин), вода начинает цвести, вообщем, условия становятся непростыми. Как раз в таких и нужно проводить тестирование оборудования. Ведь никого не интересуют характеристики, полученные вами в идеально заглушенном измерительном бассейне, все работают в реальных водоемах.
Фото рабочего момента для атмосферности:

Рисунок 3 — Engineering Director, Chief USBL system designer, R&D Director (слева направо) =)
Одна антенна может работать с 23 ответчиками (хотя мне сложно представить такую задачу, но все же). Маяки разделяются кодово, а работа с каждым из них происходит последовательно.
На следующей картинке показан скриншот хоста (пультового ПО):
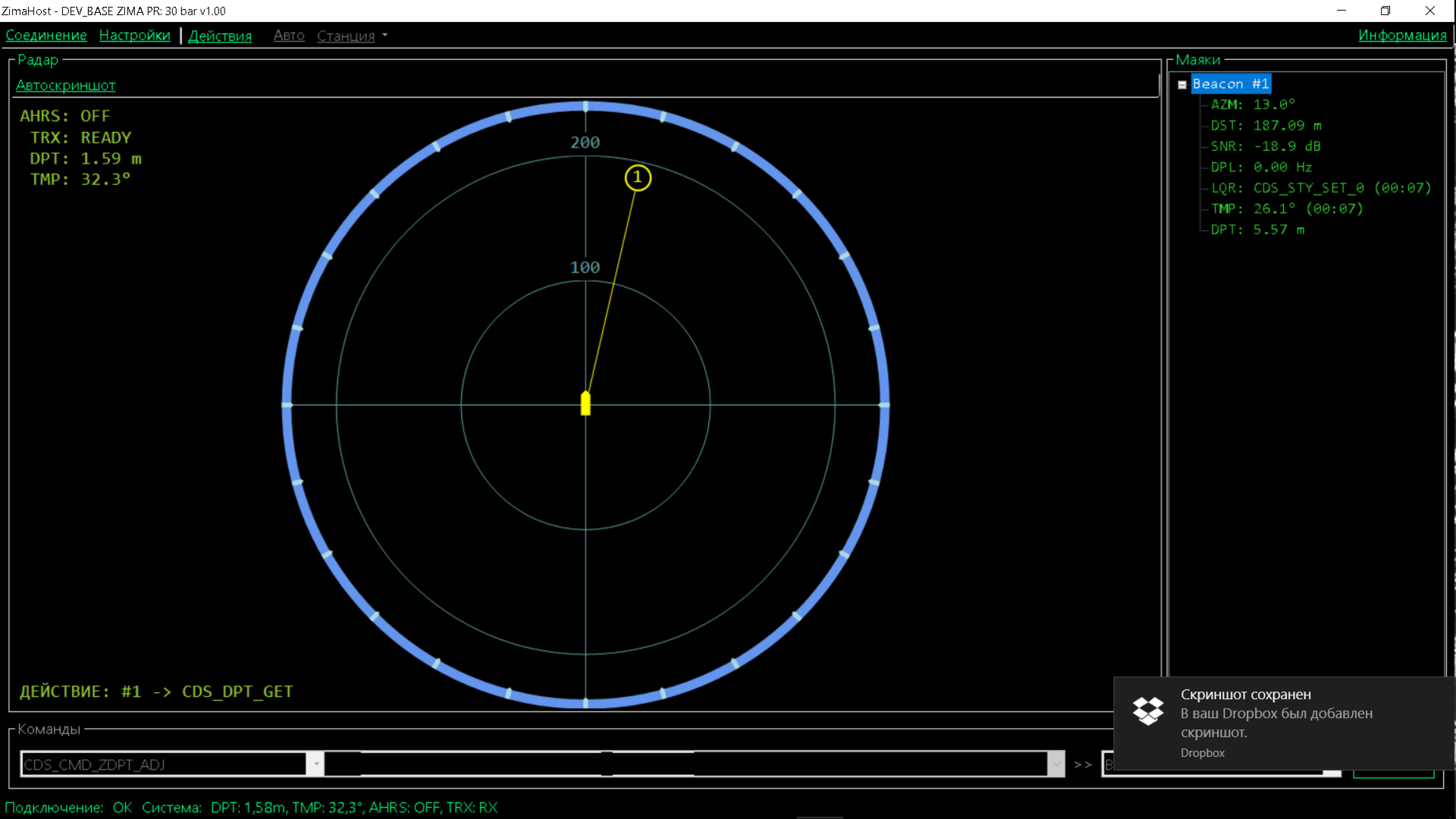
рисунок 4 — скриншот хоста USBL системы Zima
Антенна подключается к ПК через переходник UART-USB. По традиции мы применяем NMEA0183-подобный (открытый) протокол и все исходники хостов открыты на гитхаб.
Обратите внимание: на скриншоте видно, что маяк находится на глубине 5.5 метров, температура воды по его датчику — 26.1°С (!), а на самой антенне, которая висит в полутора метрах от поверхности — 32.3°С (КАРЛ!), при глубине места в этом районе порядка 15–20 метров.
Из внешних настроек системе нужна только соленость (из которой по показаниям глубины и температуры определяется скорость звука) и максимальная дистанция (по ней вычисляется максимальное время ожидания ответа маяка). По нашему методу (на который ожидается патент) маяк тоже может определять дистанцию до антенны и поддерживает функции удаленного задания солености воды с базовой станции.
Ну и наконец самое ценное, что мы получили в этом эксперименте (кроме загара) — 7-ми минутное видео (захват экрана) работы хоста:
ZimaHost — video
Поясню, что маяк был зафиксирован неподвижно — растянут между якорем и буйком, а антенна, закрепленная на штанге, свешивалась с борта (резиновой) лодки. Относительность движения, так сказать, на лицо: маяк совершает стремительный круг почета радиусом 100 с лишним метров, что на самом деле вызвано вращением лодки и, следственно, антенны.
Нам всегда есть, что рассказать. Если что-то показалось непонятным или плохо раскрытым — милости просим в комментарии. Я и мои коллеги разложим все по полочкам.
P.S. На этих испытаниях мы проверяли не только систему Zima, но и несколько других интересных гаджетов, о которых я постараюсь написать, как можно раньше.
Вас ждут:
- голос президента через 700 метров цианобактерий
- чемоданчик для призыва водолазов
- картинка-загадка (прямо сейчас!)
Попробуйте угадать по фото что это за прибор и зачем он нужен:

