NAPI в сетевых драйверах Linux
Привет, Хабр!
Поговорим о драйверах сетевых устройств Linux, механизме NAPI и его изменениях в ядре 5.12.
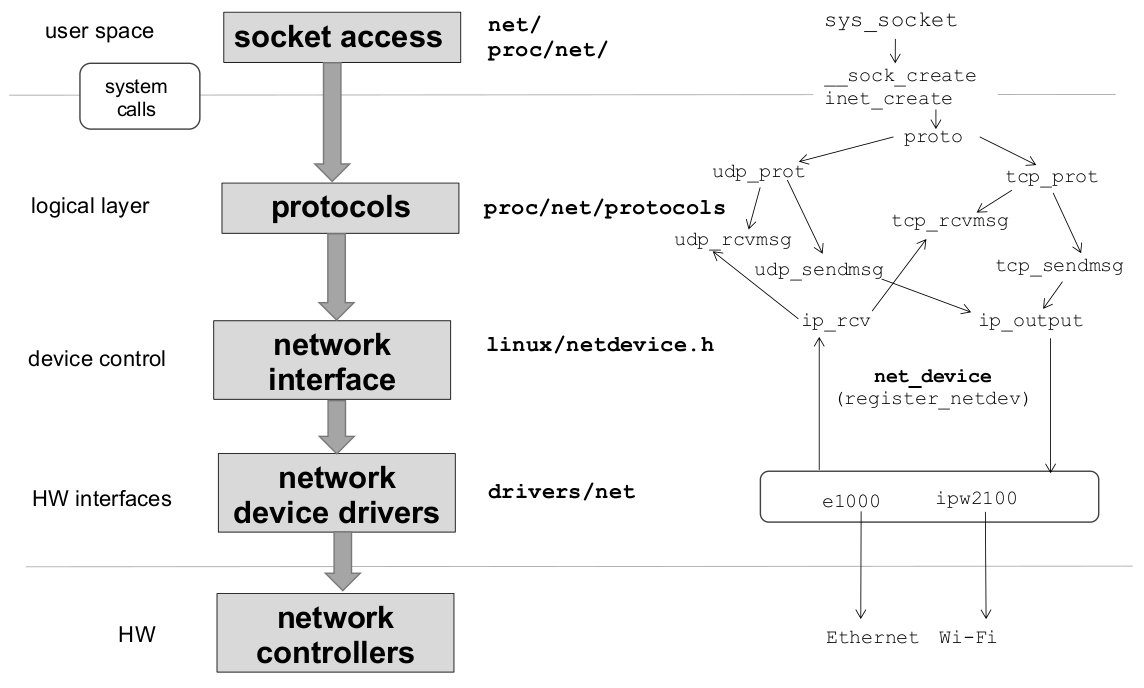
Сетевая подсистема Linux (рисунок) построена по примеру стека BSD, в ней прием и передача данных на транспортном и сетевом уровнях происходит с помощью интерфейса сокетов. В отличие от unix-сокетов для межпроцессного взаимодействия, TCP/IP сокеты используют для работы сетевой протокол и при создании (sys_socket) принимают параметры домен, тип, локальные и удаленные IP-адрес и порт. Буфер сокета (sk_buff) — фактически, пакет. Связный список экземпляров таких структур составляет очередь сетевого интерфейса (tx_queue, rx_queue).
Упрощенно — некоторые важные поля sk_buff:
struct sk_buff {
union {
struct {
/* Двусвязный список */
struct sk_buff *next;
struct sk_buff *prev;
struct net_device *dev;
};
struct list_head list;
};
struct sock *sk;
unsigned int len,
data_len;
__u16 mac_len,
hdr_len;
/* Часть NAPI-интерфейса */
#if defined(CONFIG_NET_RX_BUSY_POLL) || defined(CONFIG_XPS)
union {
unsigned int napi_id;
unsigned int sender_cpu;
};
#endif
__u8 inner_ipproto;
__u16 inner_transport_header;
__u16 inner_network_header;
__u16 inner_mac_header;
__be16 protocol;
__u16 transport_header;
__u16 network_header;
__u16 mac_header;
sk_buff_data_t tail;
sk_buff_data_t end;
unsigned char *head,
*data;
unsigned int truesize;
};Драйвера отвечают за реализацию канального уровня (разрешение MAC-адресов) и предоставление интерфейса между системными вызовами ядра и сетевой картой. Обработка входящих и исходящих пакетов происходят с помощью функций xmit и rx, от одновременного доступа они защищены спин блокировками, как и обновление статистики stats и изменение параметров передачи. Сам интерфейс определяется структурой net_device, для создания и регистрации вызываются функции alloc_netdev и register_netdev.
Важные поля net_device:
struct net_device {
char name[IFNAMSIZ]; // Строка в стиле printf
unsigned long mem_end;
unsigned long mem_start;
unsigned long base_addr;
unsigned long state;
struct list_head dev_list;
struct list_head napi_list;
unsigned int flags;
unsigned int priv_flags;
const struct net_device_ops *netdev_ops;
unsigned short hard_header_len;
unsigned int mtu;
struct net_device_stats stats;
atomic_long_t rx_dropped;
atomic_long_t tx_dropped;
atomic_long_t rx_nohandler;
const struct ethtool_ops *ethtool_ops;
const struct header_ops *header_ops;
unsigned char if_port;
unsigned char dma;
/* Interface address info. */
unsigned char perm_addr[MAX_ADDR_LEN];
unsigned short dev_id;
unsigned short dev_port;
spinlock_t addr_list_lock;
int irq;
unsigned char *dev_addr;
struct netdev_rx_queue *_rx;
unsigned int num_rx_queues;
struct netdev_queue *_tx ____cacheline_aligned_in_smp;
unsigned int num_tx_queues;
struct timer_list watchdog_timer;
int watchdog_timeo;
};Сетевой драйвер похож на блочный: передает и получает данные по запросу, но блочные драйверы отвечают только на запросы ядра, а сетевые получают пакеты асинхронно извне. Долгое время в Linux, когда сетевое устройство «просило» поместить входящие пакеты в ядро, действовал механизм обработки аппаратных прерываний.
Схематичные действия в обработчике прерываний для очистки очереди входящих пакетов: (драйвер intel Ethernet e1000):
static bool e1000_clean_rx_irq(struct e1000_adapter *adapter, // Сетевое устройство
struct e1000_rx_ring *rx_ring, // Очередь входящих пакетов
int *work_done, int work_to_do)
{
while (rx_desc->status & E1000_RXD_STAT_DD) {
struct sk_buff *skb;
u8 *data;
u8 status;
if (netdev->features & NETIF_F_RXALL) {
total_rx_bytes += (length - 4);
total_rx_packets++;
e1000_receive_skb(adapter, status, rx_desc->special, skb);
}
}
if (cleaned_count) // Создание нового буфера
adapter->alloc_rx_buf(adapter, rx_ring, cleaned_count);
// Обновление статистики
adapter->total_rx_packets += total_rx_packets;
adapter->total_rx_bytes += total_rx_bytes;
netdev->stats.rx_bytes += total_rx_bytes;
netdev->stats.rx_packets += total_rx_packets;
return cleaned;
}До ядер версии 2.3 после самого обработчика прерывания (top half) для выполнения основных задач использовались нижние половины (bottom half) и очереди задач (task queue). Начиная с версии 2.3 на замену интерфейсу BH пришли отложенные прерывания (softirq), тасклеты (tasklet) и очереди отложенных действий (work queue). Преимущество softirq в том, что они могут одновременно выполняться на разных процессорах. Они напрямую используются в сетевой подсистеме.
Немного о NAPI
Пока сетевой трафик был умеренным, механизм прерываний при получении пакета эффективно справлялся со своей задачей. С ростом трафика и появлением высоконагруженных систем постоянная обработка прерываний стала приводить к нехватке процессорного времени для пользовательских программ и потере пакетов. Решение проблемы было предложено в 2001 году и появилось в виде интерфейса New API в ядрах серии 2.4. (В оригинальной статье — результаты тестирования для SMP-системы, генератор трафика наподобие pktgen).
Основная цель NAPI — сократить количество прерываний, генерируемых при получении пакетов. В NAPI механизм прерываний сочетается с механизмом опроса. Чаще всего в разработке избегают использования поллинга, так как могут тратится лишние ресурсы, когда оборудование молчит. У выоконагруженных интерфейсов такой проблемы не возникает.
В NAPI-совместимых драйверах прерывания отключаются, когда на интерфейс приходит пакет. Обработчик в этом случае только вызывает rx_schedule, гарантирующий, что обработка пакетов произойдет в дальнейшем. Когда приходящие пакеты заполняют буфер (предельное количество — budget), для обработки вызывается метод dev→poll. Метод poll будет вызываться одновременно не более, чем на одном процессоре, что упрощает синхронизацию. Если нагрузка падает, снова разрешаются прерывания. Это позволяет динамически регулировать производительность в зависимости от нагрузки интерфейса. Метод poll может использоваться также и для передачи пакетов.
Пример poll из драйвера e1000:
static void e1000_netpoll(struct net_device *netdev)
{
struct e1000_adapter *adapter = netdev_priv(netdev);
if (disable_hardirq(adapter->pdev->irq))
e1000_intr(adapter->pdev->irq, netdev);
enable_irq(adapter->pdev->irq);
}При реализации NAPI-совместимого драйвера должны быть выполнены некоторые требования:
Возможность хранения входящих пакетов в кольце DMA или буфере в самой карте
Возможность отключить прерывания
В методе poll должна быть реализована возможность забрать несколько пакетов за раз
Так как метод poll работает в контексте softirq и управляется демоном ksoftirqd, в системах с высокой загрузкой нужно менять приоритет поллинга для обеспечения баланса ресурсов между обработчиком прерываний и пользовательскими программами.
Недостатки NAPI:
В некоторых случаях в системе могуть быть задержки, если весь обработчик прерываний помещен в dev→poll
Маскировка прерываний может быть медленной
Возможно состояние IRQ-гонки, если пакет приходит во время проверки бита наличия новых пакетов и включения прерываний.
Что нового у NAPI в 5.12?
В серии патчей в ядре 5.12 метод poll из softirq контекста перенесен в поток ядра.
Wei Wang в комментарии к патчу рассказывает, что причина такого решения — отсутствие возможности отследить программные прерывания в системе. Планировщик не может измерить время, затрачиваемое на обработку softirq. Поток ядра же видим для планировщика задач CPU, это позволит избежать перегрузки процессора, на котором он работает, и сделать планирование userspace-процессов более детерминированным. Его проще контролировать системному администратору. Kthread можно связать с определенной группой CPU, чтобы явно отделить пользовательские потоки от процессоров, опрашивающих сетевые интерфейсы.
Изменения затронули в основном net/core/dev.c. Обновлен метод __napi_poll, вызываемый из контекста napi_poll. Появился новый sysfs атрибут в net_device для включения/выключения поточного режима опроса для всех экземпляров napi данного сетевого устройства без необходимости вызова up/down.
В napi_struct добавлено поле threaded для реализации опроса внутри потока, причем для включения поддержки потоков после создания kthread нужно вызвать napi_set_threaded (флаг NAPI_STATE_THREADED).
Обновленная структура napi_struct:
struct napi_struct {
struct list_head dev_list;
struct hlist_node napi_hash_node;
unsigned int napi_id;
struct task_struct *thread;
};Создание потока ядра:
static int napi_kthread_create(struct napi_struct *n)
{ int err = 0;
/* Create and wake up the kthread once to put it in
* TASK_INTERRUPTIBLE mode to avoid the blocked task
* warning and work with loadavg.
*/
n->thread = kthread_run(napi_threaded_poll, n, "napi/%s-%d",
n->dev->name, n->napi_id);
if (IS_ERR(n->thread)) {
err = PTR_ERR(n->thread);
pr_err("kthread_run failed with err %d\n", err);
n->thread = NULL;
}
return err;
}В связи с добавлением поточности появился новый метод napi_thread_wait.
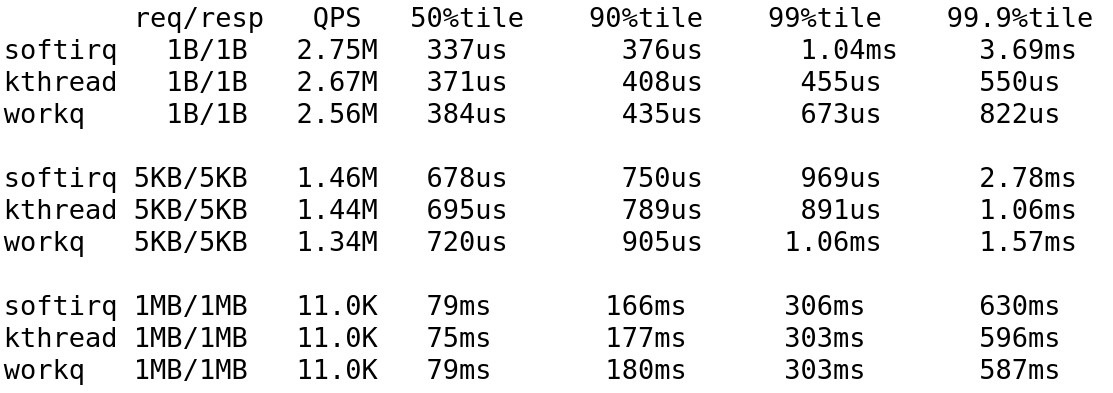
Wei Wang получил следующие результаты сравнения эффективности softirq, kthread и очередей отложенных действий:
Основные источники — LDD3 и статьи:
NAPI polling in kernel threads
Threadable NAPI polling, softirqs, and proper fixes
Reworking NAPI
Driver porting: Network drivers
Заранее спасибо за уточнения и указания на ошибки!
