Мы разработали 44 устройства за 6 лет, продаем их по всему миру, только этого мало
»Только, только, только, только этого мало» © Песня на стихи А. Тарковсковского, 1967. Пропевать голосом Бони Нем
История эмиграции, блеск и нищета стартапов, техническое порно, непрерывная разработка, гидроакустика, нарциссизм, рефлексия, open-source и много фото.
Это все под катом.
Intro
Приветствую, глубокоуважаемые!
Сейчас нас шестеро, считая Гендиректора — два программиста, два электронщика и сборщик. Это конечно номинально, т.к. сборщики по факту все. Плюс бухгалтер — седьмая.
Начинали втроем — программист, электронщик и гендиректор.
Мы разрабатываем и производим электронику. Точнее — гидроакустическое оборудование: системы связи и навигации.
Не далее как вчера, в рамках подготовки какой-то презентации, меня спросили что-то вроде: «А мы можем написать, что мы разработали более двадцати разных приборов за все время».
Точность — вежливость королей, как известно. И я принялся выписывать на бумажку поприборно, что мы успели сделать.
Интересная вещь: ты помнишь каждое устройство, держишь в голове какие-то детали прошивки и протокола сопряжения, особенности сборки разных устройств, но общее их число как-то ускользает.
В получившийся список не попали «не взлетевшие», или, учитывая нашу специфику, «не нырнувшие» изделия, которых, к слову сказать, было всего три. Также туда не вошли и предыдущие версии некоторых приборов, которые, сохранив название, были переделаны буквально заново.
Как бы это странно не звучало, список нас сильно удивил — он оказался больше, чем мы думали.
Мы насчитали 44 разных прибора, которые мы сделали за 6 лет существования конторы. Это те устройства, к каждому из которых на сайте можно найти спецификацию, которые поддерживаются и обновляются постоянно.
Я до сих пор не уверен — много ли это, или мало? Предмет ли это для гордости, или нас сейчас засмеют в комментариях опытные разработчики и управленцы из крупных или мелких контор? Или может быть это средний показатель для подобных команд? Или, скажем, мы входим в первую треть? Или в последнюю? Понятия не имею.
Даже если наши достижения более чем скромны или просто ординарны, и мы зря возгордились (а мы возгордились — вот ведь в чем проблема) — мы всегда работали на пределе, с «полным погружением» так сказать, и нам не за что стыдиться.
Собственно, вот эти эмоциональные осцилляции и привели к тому, что я сейчас пишу эту статью.
Тысячеликий дурак
Как мне видится, программированием я занялся с книжки «Энциклопедия профессора Фортрана». А в 1997 году перейдя в 7 класс 77 средней школы Волгограда я пошел на курс «Лаборант-Программист» в учебно-производственном комбинате. Там мы рисовали картинки на BASIC на каких-то советских ЭВМ. Потом писали что-то на Turbo-Pascal.
Но наверное, это все от того, что моя мама была программистом. Тогда, в конце 80-х и начале 90-х это было достаточно редкой профессией. Как-то вышло, что я пошел именно по ее стопам — с детства видел дискеты и перфокарты, и года в 3 или 4 она брала меня с собой на работу и меня водили «показывать машину» — огромный шкаф с пленочными бобинами, кучей кнопок и лампочек. Как мне представляется, в этом описании себя смогут узнать многие мои сверстники.
В детстве я этим очень гордился, было в этом какое-то прикосновение к сакральным тайнам. Видимо когда-то тогда во мне укоренилась мысль, что я просто должен знать про это больше всех — у меня лучшие стартовые условия, нельзя опозориться.
У меня очень хорошая память, и как я понимаю сейчас, это сыграло со мной злую шутку: мне было легко в учебе, потому что заучивать особо ничего не приходилось. Ну так я и не заучивал. Я с успехом мог пустить пыль в глаза, но знания по школьным предметам у меня никогда не были целостными.
После школы я собирался поступать в Волгоградский Политех на вычислительную технику, и несмотря на занятия с репетитором по физике — не поступил. Мне хватило баллов от централизованного тестирования только на Автотракторный Факультет и Технологию Конструкционных Материалов. Металлургия меня не впечатляла совсем, а на автотракторном я обнаружил специальность «САПР Комплексов» и убедил себя, что это даже лучше — я не буду программистом в вакууме, а буду писать какой-то крутой эмбеддед. Слова такого я тогда еще не знал конечно. А весь «САПР», как оказалось, состоял в дополнительном семестре по С++ Builder и двух годах Autocad.
В железки и программирование контроллеров, меня, как человека мечущегося, утянул давний товарищ (поступивший на вычислительную технику кстати), который очень многому меня научил и с которым мы как-то разошлись по жизни.
На диплом я сделал «Систему горизонтирования». Товарищ ненавязчиво предложил мне взять акселерометр ADXL202, обрабатывать его 8-битным контроллером ATTiny и по проекции силы тяжести при помощи шагового двигателя и штатива с реечной передачей выставлять строительный уровень в горизонтальное положение. Руководитель от кафедры исполнял свою роль лишь номинально, я делал что хотел и из диплома получился отличный перфоманс на защите. Это естественно еще больше уверило меня в том, что я иду в правильном направлении. Как говорил другой мой потерянный товарищ — positive reinforcement only, Alex.
Пройдя практику и проработав год в одной организации по профилю институтской кафедры и пописав на C# корявый офисный софт, ко мне пришло осознание, что до написания какого-либо встраиваемого очень крутого и важного софта меня походу не допустят. Потому что его тут и не пишут, и с чего это я вообще взял?
Часто бредя до проходной зимними вечерами я взращивал в себе мысль о том, что я, такой талантливый, хороший и недооцененный нахожусь здесь лишь божьим упущением. Индустриальные пейзажи, опустевшие цеха, ржавые металлоконструкции и особенно мизерная зарплата очень эффективно этому способствовали.
Я ушел на другой завод, где для очередного осознания потребовался ровно месяц.
Еще один дальний знакомый позвал в другую похожую организацию, пообещав более интересную работу и чуть более высокую зарплату. В сентябре 2009 я устроился в НИИ.
НИИ стало для меня и моих друзей и коллег свеобразными яслями — мы игрались в гидроакустику, как детки. Старшие товарищи разговаривали с нами, как с равными. Охотно делились знаниями и разными историями из жизни.
Мы писали научные статьи, экспериментировали, сами выдумывали себе работу. Находили на складе (мусорке) старое оборудование и делали с ним всякое.
Дошло до того, что мы в тайне от руководства, в частном порядке выезжали на водоемы и испытывали какие-то свои изобретения. А когда руководству пришлось сказать, все наши игрушки вошли в настоящий ОКР (Опытно-конструкторская работа). Поделки даже попали на выставку.
Сейчас уже всего и не вспомнить, но вроде до определенного момента все шло просто замечательно. Я так подозреваю, что у всех нас этот момент свой. И у тех, с кем мы и сейчас работаем вместе, и у тех, с кем наши дороги разошлись.
Расскажу про свой. Уже не помню в каком году, мы поехали на какие-то испытания на большой бассейн в головную организацию — в концерн. И в один из дней, под конец работы нас посетил зам. гендиректора по научной работе. Точно даже и не помню о чем был разговор, но отчетливо помню такую его фразу:
«Передайте г-ну вашему директору, что нам ваши поделки за наши деньги не нужны»
Потом мы пытались всей бандой сменить место работы, искали, так сказать, тех, кому нужны поделки. Ходили то в одну профильную организацию, то в другую. Пока из очередной на нас не донесли руководству. Вызывали по одному к директору и проводили беседу. Заслуженно конечно, чего уж там.
А наш учитель и тогдашний непосредственный начальник Игорь Владимирович Бобровский сказал мне такую сакраментальную фразу: «Зачем вы туда пошли? Они ж все одним говном мазаны.»
На мой вопрос «А куда надо было?» Он бросил: «За границу».
Ах да, было это в 2013 году, потому что уже летом 2014-го, чтобы два раза не вставать, с должности научного сотрудника в НИИ я телепортнулся на должность Research Associate в Манчестерский университет. До этого я даже заграницей ни разу не был.
Прошел собеседование, подтянул английский, сдал IELTS, сделал флюорографию и получил рабочую визу Tier 2. Оборачиваясь назад, мне кажется, что я сделал это не приходя в сознание.
Чтобы вы понимали уровень моей наивности: ожидая в Москве готовности визы, я пошел и купил себе трекинговые ботинки salewa — потому, что в англии очень часто идут дожди.
Я знал как надежно передавать цифровые данные гидроакустическим способом через воду и имел некоторое понятие и опыт в разработке навигационных систем. Проект, над которым я работал заключался в создании многопользовательской системы гидроакустической связи и навигации для стаи автономных микроАНПА, выполняющих осмотровые задачи в прудах-отстойниках с радиоактивными материалами.
 Железнодорожная станция Sellafield. Прошлое название Windscale. Тут располагается атомная станция, известная тем, что в 1957 году на одноименном реакторе произошла авария
Железнодорожная станция Sellafield. Прошлое название Windscale. Тут располагается атомная станция, известная тем, что в 1957 году на одноименном реакторе произошла авария
Работа располагалась в «озерном крае», он же Lake District, он же Cumbria:
 Озерный край запомнился мне таким
Озерный край запомнился мне таким
С коллегой-англичанином мы пополам снимали небольшой дом в городке Workington.
Зарплаты хватало на аренду дома, питание не из царского меню, мелочи с eBay и немного откладывать. Отношения с коллегами сразу сложились дружеские и очень продуктивные. Климат был как я люблю — сырой и дождливый.
Начав работу с августа, к новому году у меня уже был рабочий макет навигационной системы, проверенный в бассейне. Поначалу электроника монтировалась в пластиковой коробке из-под кекса Haribo, коллеги тогда так и называли мой макет — «Alex«s Haribo Box». В дальнейшем я пересобрал его в пластиковом чемоданчике.
 Alex«s haribo box
Alex«s haribo box
И еще у меня уже был на руках подписанный контракт на следующий год.
Но.
Всегда ведь есть какое-то «но», правда?
Concilio et labore
 Витраж «Concilio et labore» (лат. «Мудростью и трудом») в Sackville street building, кампус Манчестерского университета.
Витраж «Concilio et labore» (лат. «Мудростью и трудом») в Sackville street building, кампус Манчестерского университета.
С одной стороны я наверное заскучал как по родине и родным, так и в прямом смысле — свершений хотелось, что ли.
А с другой стороны, я плотно общался со своими коллегами по НИИ. И мы с @StDmitriev просто в чатике что-то обсуждали и проектировали. Он мне постоянно помогал с электроникой — усилители, предусилители, антенны.
Насколько я могу вспомнить, изначально даже не вполне понимали, какова цель. В итоге придумали как внутрь цилиндрической антенны затолкать всю требуемую электронику. В основном придумал Стас, я просто дополнял все до диалога.
Получился максимально компактный гидроакустический прибор, который мог бы излучать, принимать и обрабатывать сигнал.
Прелесть состояла в том, что все намертво заливалось в полимер, наружу торчал только кабель. Проблема герметизации решалась кардинально. Но был и определенный минус такой конструкции — залив единожды прибор в полимер, исправить что-либо в случае ошибки или поломки уже не представлялось возможным.
Как выяснилось позже, и то и другое оказалось не совсем верно.
Забегая вперед, выглядит это так:
 Гидроакустический навигационный приемник подводного GPS. Вся электроника включая аналоговые тракты и процессов расположена внутри гидроакустической антенны. Видно окошко датчика давления
Гидроакустический навигационный приемник подводного GPS. Вся электроника включая аналоговые тракты и процессов расположена внутри гидроакустической антенны. Видно окошко датчика давления
Корпус подводного прибора делать как-то сложно, дорого и непонятно. Наше решение было радикальным — нет корпуса — нет проблем!
Кажется, это был наш первый патент. По иронии судьбы, в США он был получен самым последним — пришлось попрепираться с американскими патентными экспертами.
Чуть позднее, спустя несколько дней, одним утром, пока я принимал душ, на меня вдруг снизошло озарение.
О небеса и бездна! О боги! Это тяжелый наркотик!
Около получаса я ощущал себя никак не менее чем Архимедом.
Совершенно непередаваемое ощущение — поэтому я его тут и не передам. И при личной беседе тоже не смогу.
У меня вдруг как-то само в голове сложилось, как можно обеспечить географическими координатами неограниченное число подводных объектов одновременно, чтобы они друг другу не мешали.
Конечно, я не изобрел GPS: речь о более специфических и узких деталях. Схема состояла в том, что четыре буя поочередно передают определенные данные, синхронизированно с часами GPS, и сколько угодно абонентов под водой могут эти посылки принимать, измерять момент прихода сигнала и определять собственные абсолютные координаты.
Впоследствии это стало нашим вторым патентом.
Наверное тогда я и решил вернуться. Через нашего старого друга из США мы познакомились с нашим гендиректором из Москвы. Который как раз и направил и направляет мечущихся изобретателей по сей день.
Коллеги из университета и руководство восприняли мой уход в целом нормально. Я постарался оставить дела в наилучшем состоянии, чтобы мой будущий сменщик смог поднять брошенное знамя как можно быстрее.
 Наш состав на 2015–2016 годы
Наш состав на 2015–2016 годы
Вернулся я в мае 2015, а в июле мы уже принимали участие на МВМС-2015 с нашим подводным GPS и кодовым гидроакустическим модемом.
Работали мы сначала у Стаса на недостроенной веранде, выглядело это как-то так:
 Разогрев компонентов для заливки на песчаной бане, бочка вместо верстака.
Разогрев компонентов для заливки на песчаной бане, бочка вместо верстака.
Стас паял, проектировал заливочные формы и корпуса, я писал код, вместе мы заливали и собирали первые устройства. Дома у Стаса было так:

Это был лютейший цейтнот — я уезжал от Стаса в три ночи, когда в Волгограде летом уже начинает полным ходом светать.
Итак, у нас к середине лета 2015 года было готово:
система подводного GPS в бета-версии, состоящая из
гидроакустического буя RedBase

навигационного приемника RedNode для интеграции с роботами

носимого навигационного приемника с экранчиком для использования водолазами. Сейчас это составное устройство — RedNav, куда входит навигационный приемник и блок с кнопками и экраном.

В первой версии это был единый прибор. Выглядел он так:

Он имел встроенную беспроводную зарядку и свою антенну. В него с самой первой версии можно было загружать маршрутные точки, сохранять точки по мере движения под водой и выгружать трек. Соединение с устройством при помощи Bluetooth.
Минусы такой конструкции не заставили себя ждать: если прибор повесить водолазу на руку, как это и предполагалось, антенна часто может находится в очень невыгодном положении относительно передатчиков. Плюс она сама по себе имела меньший размер по сравнению с устройством для роботов (ТНПА/АНПА). В среднем тут меньший размер — меньшая площадь — меньше энергии соберет антенна из воды.
Сейчас навигационный приемник крепится на баллон водолаза. Вот так:

Или на специальной водолазной панели с компасом, так:

Внезапно, нашего знакомого водолаза с нашим подводным GPS поместили в сканворд. Бывают же такие совпадения! Еще более невероятным совпадением было то, что нам на глаза этот сканворд попался.
В последних версиях мы ушли от беспроводной зарядки, вместо этого зарядка происходит через металлические корпуса пьезокнопок по бокам наручного прибора. Оказалось, что так надежнее и проще.
Где-то в это же время мы стали резидентами «Сколково», и я понимаю, что в обществе упоминание «Сколково» носит негативную коннотацию, но вот с точки зрения меня, как просто разработчика — «Сколково» реально очень сильно нам помогли. Для меня не очень ощутим факт работы без НДС и всякие налоговые вещи — я, честно сказать, в этом не разбираюсь. Но, например, я не представляю, как бы мы потянули все патенты, в особенности европейские и американские — это сумасшедшие деньги. Так же «Сколково» спонсировало какие-то выставки, куда бедным артистам вход заказан.
Еще у нас был кодовый модем — RedGTR, получился он чисто как побочный продукт.
Итого, менее чем за полгода раздельного проектирования и за пару месяцев совместных сборок у нас появилось 4 разных устройства.
Я часто вспоминаю слова еще одного моего старого коллеги из НИИ. Они звучали примерно так: дурак он и есть дурак, он ни о чем не волнуется и часто влезает туда, куда умный бы поостерегся. И с годами я все больше узнаю в этом описании себя.
Нет времени объяснять: разрабатывай
Сразу после выставки мы умчали на беломорскую биологическую станцию МГУ на испытания, где и получили первый трек от нашего подводного GPS:
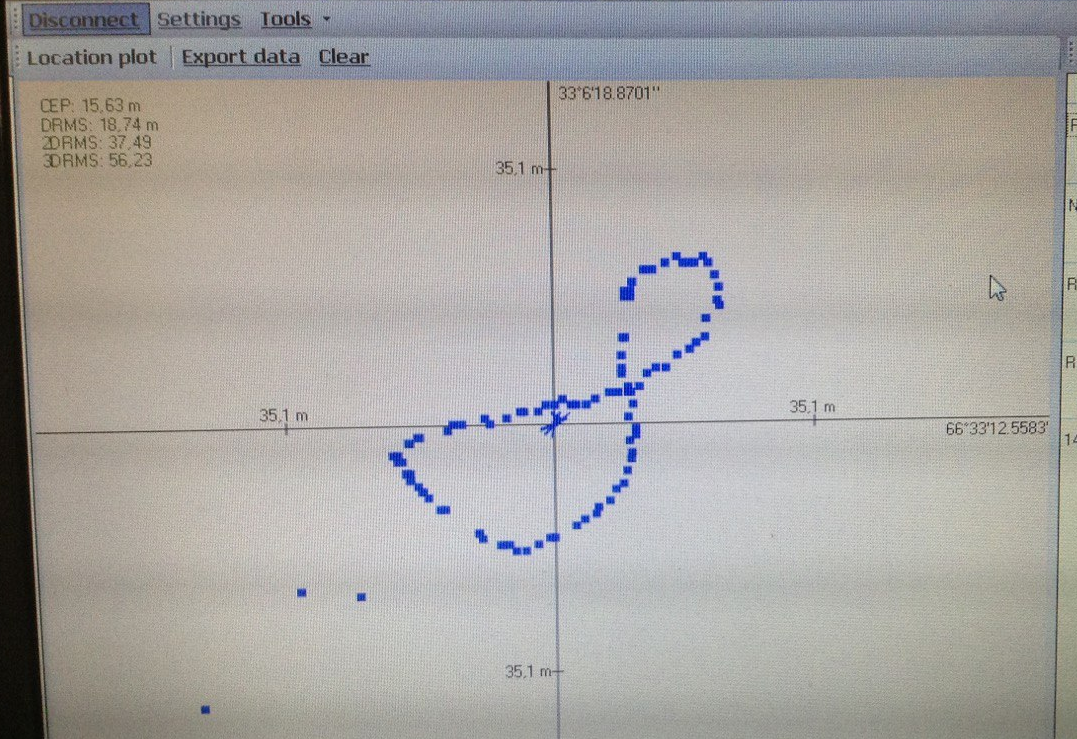 Первый трек полученный при помощи системы RedWave. Лето 2015, Белое море. Трек сохранился только в виде фото.
Первый трек полученный при помощи системы RedWave. Лето 2015, Белое море. Трек сохранился только в виде фото.
Дальше были доработки, первые продажи и изготовление. И испытания на разных водоемах.
На одних испытаниях с МЧС на черном море был интересный казус, который немного выбил нас из колеи.
Мы разворачивали свои буи, рассказывали что-то водолазам, они вяло задавали вопросы, кто-то сплавал и подтвердил что все работает как положено.
Затем пришел какой-то мужик и сообщил всем: «пацаны, пойдемте, сейчас придет изобретатель»

К нам немного потеряли интерес, но это было в принципе стандартно. Забавно другое. Когда пришел «изобретатель», выяснилось, что изобретение это — «спарка» — два водолазных баллона на спину, чешского производства, соединенных итальянскими шлангами и фитингами, смонтированных на вырезанную гидравлическим резаком из нержавеющего листа «раму».
Ребята, а как же мы? Ведь у нас тут координаты под водой! Ведь мы же по сути вручную повторили GPS! Не только в идеологическом смысле, но и в плане реализации: это же цифровая связь с кодовым разделением абонентов, написанная ручками с нуля!
А как же желтенькие корпуса? А противоскользящий ремешок? «Товарищи, товарищи! Ээээх, товарищи…»
Наверное, нас восприняли как перепродавцов с Алиэкспресс. Дальше — больше.
Выяснилось, что водолазы МЧС (те, которых мы видели) в основном — днищеброды, то есть те, которые по дну бродят на шланге. Шланг ну тридцать, ну сорок метров бывает. Связь там как в домофоне — по проводу, а определять местоположения водолаза и не надо: вот же он — на том конце кабельно-шланговой связки, а даже более точно — под буйком, который к нему привязан.
Те же, кто хотел бы определять местоположение роботов в основном не осиливали интеграцию — чтобы взять данные с приемника, расположенного на аппарате, приемник надо к роботу как-то подключить, запитать, поднять данные по кабелю на надводный пульт — непосильная задача для большинства. Те же, кто осиливал — оставались очень довольны.
В общем, получается так
Попутно стоит отметить, что где-то в течение 2016 года мы сделали еще два устройства — модемы RedLine и Natrix. RedLine являлся логическим продолжением RedGTR, только теперь это уже был не кодовый модем (это как пульт с большим числом команд и на несколько десятков абонентов), а полноценный. То есть при помощи него можно было просто передавать произвольные пользовательские данные. RedLine обеспечивает скорость в 80 бит/с на максимальной теоретической дальности 8000 метров.
Natrix же был сделан немного по другой схеме и по задумке мог передавать со скоростью уже до 560 бит/с. Однако, мы сделали несколько штук и отказались от него вообще — нас не устраивала надежность связи. Связь это всегда компромисс между надежностью и скоростью передачи.
Оба модема заливались в ту же форму, что и навигационный приемник подводного GPS, и выглядят они совершенно неотличимо.
Где-то в то же время нас попросили сделать измеритель давления с передачей по RS-485 и отображения на экране. Как раз для водолазов, работающих на кабельно-шланговой связке. Мы немного воротили нос, мол, а где тут гидроакустика? Но таки взялись и достаточно быстро сделали.
Промежуточный итог середины 2016 года — 8 устройств. Напомню, что к этому времени мы уже нагружены производством того, что было разработано ранее. Я потом еще буду об этом напоминать по ходу текста.
В два раза больше программистов
В том же 2016 мы начали особенно остро ощущать нехватку рабочих рук. Мы довольно быстро перетянули из НИИ одного из давних коллег. Число программистов выросло в два раза, и теперь мы уже могли разрабатывать и УКБ системы — появился профильный специалист.
УКБ значит ультракороткобазисный, английская аббревиатура — USBL. Так называется класс систем, где определение местоположения подводного объекта происходит дальномерно-угломерным способом. Как правило, с борта судна свешивается прибор, который в своем составе имеет фазированную антенную решетку. На объекте, местоположение которого необходимо определить, располагается пингер или маяк-ответчик. Антенна или предварительно синхронизируется с пингером или запрашивает маяк-ответчик. По времени распространения определяется наклонная дальность, а при помощи антенной решетки определяется угол (или углы) прихода сигнала. Таким образом объект локализуется в сферической или цилиндрической системе координат.
Все это очень любят, потому что в простейшем случае нужно два устройства, одно из которых ты можешь буквально веревкой примотать к аппарату или водолазу, а второе свешивается с судна.
Изначально со Стасом мы зарекались заниматься УКБ, но под давлением общественности передумали.
Если маяк-ответчик отличался от кодового модема RedGTR лишь прошивкой и совсем немного номиналами в аналоговом тракте, то антенна с фазированной решеткой штука довольно непростая во всех смыслах.
Систему назвали Zima. Я предложил это название, потому что мне понравилась фамилия уголовника в исполнении актера Гармаша из фильма «Охота на пиранью».

Да это кринж, и фильм тоже кринж. Собственно все, что мне оттуда понравилось это фамилия.
Фото маяка-ответчика приводить не буду, ибо он неотличим от остальных цилиндров, а пеленгационная антенна выглядит так:

В общем-то это такой же цилиндр, к которому снизу добавлена антенная решетка. Все также намертво залито в полимер.
Меж тем, продолжаем загибать пальцы: маяк-ответчик это 9 и антенна это 10.
В этой версии системы применили интересное решение — т.н. двусторонняя навигация, на что мы тоже получили патент.
Суть состоит в том, что не только антенна измеряет расстояние до маяков-ответчиков, но и маяки тоже определяют расстояние до антенны: ответный сигнал маяка для антенны является как бы запросным и она посылает второй запрос через определенное время после получения первого ответа. Это позволяет маяку тоже определить наклонную дальность до антенны. Но это половина истории. Если к системе, а точнее к пультовому ПК подключен GNSS-компас и определяются абсолютные координаты маяков, то вторым запросом антенна посылает маяку вычисленный абсолютный азимут на нее.
Таким образом, маяк может получать навигационную информацию для осуществления привода — возвращения на базу.
Я точно помню, что полностью рабочий образец поехал на следующую выставку (это биенале) к концу июня 2017 года.
Период 2016–2017 вообще был жаркий. Мы взяли еще одного человека — сборщика.
Мы арендовали помещение и начали делать ремонт. Плавно перейдя от этого:
К этому:
Пока все частично сидели по домам в виду ремонта сделали еще несколько устройств.
Во-первых, водолазную телефонию в двух приборах:
поверхностная станция RedPhone-OS
водолазная станция RedPhone
 Наши приборы: водолазная телефония, водолазные приборы с маской (слева) и надводная станция справа
Наши приборы: водолазная телефония, водолазные приборы с маской (слева) и надводная станция справа
Водолазная телефония коварная вещь: при относительной простоте технологии связи, много возни с масками и гарнитурами. Первая версия нашего водолазного прибора была сделана очень по мотивам OTS BuddyPhone. Это было с одной стороны большим промахом — дизайн крайне неудачный, а с другой стороны огромным опытом.
BuddyPhone выглядит так:

Это соответственно 11 и 12.
Еще тогда же мы сделали «водолазный привод» Vostok. Очень интересный концепт: есть надводный чемоданчик с опускной антенной и любое число носимых устройств.
Работает все следующим образом:
Надводный чемодан излучает специальный сигнал через равные промежутки времени. Носимое устройство — акустический компас имеет упрощенную версию фазированной антенной решетки и может определять горизонтальный угол прихода сигнала. Этот угол оно отображает на экране и водолаз может видеть направление на базу, то есть может вернуться в месту как они его там называют, точка сбора или выхода.
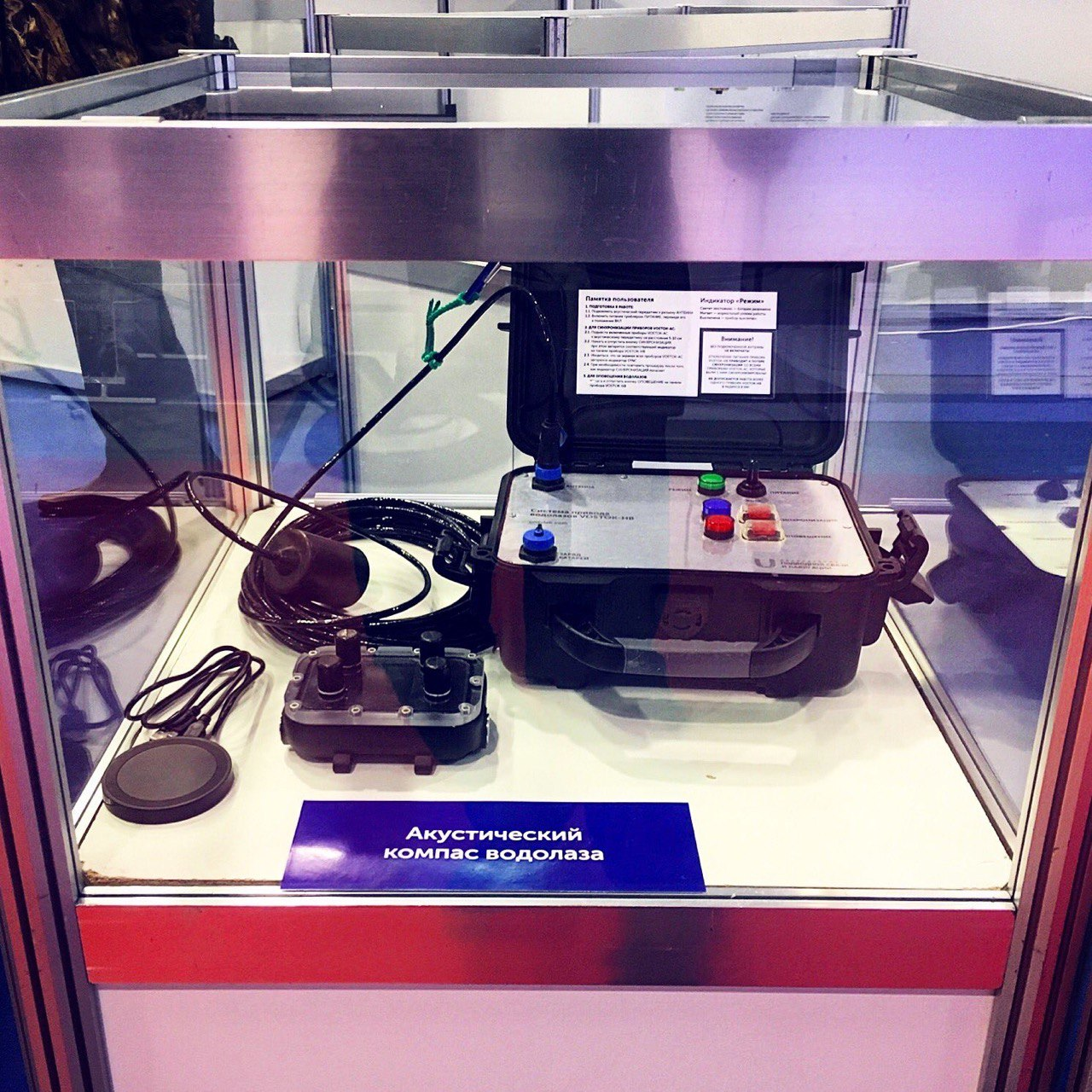 Водолазный привод «Восток»: носимый «акустический компас» и надводная станция. В первом образце были пластиковые кнопки, потом они были заменены на пьезокнопки
Водолазный привод «Восток»: носимый «акустический компас» и надводная станция. В первом образце были пластиковые кнопки, потом они были заменены на пьезокнопки
Беда только в том, что мы допустили ошибку на этапе проектирования и возникла проблема с распространением звука по стеклу носимого прибора. От этого прибор нормально не заработал. Но мы обязательно вернемся к этому концепту, когда будет свободное время.
Просто примем к сведению, но считать эти два прибора не будем.
Где-то в этом же временном промежутке нас кто-то попросил продать просто антенны. Мы подошли к вопросу основательно, и пополнили свою номенклатуру еще четырьмя устройствами, одно из которых выполнено по схеме Free Flooded Ring и предназначено для работы на глубинах до 1000 метров. Конечно, в антеннах нет процессоров и алгоритмов, но есть заливочная форма, техпроцесс сборки и работа по обмеру характеристик.
На основе антенны на 1000 метров пришлось создать версию УКБ Zima, с OEM-версией маяка и антенной на 1000 метровую глубину. Сам корпус мы проектировать не стали, ибо это немного не наш профиль, но электронику и прошивки пришлось сильно переделывать. Это еще одно устройство.
Пока прокручивал все это в голове, вспомнил еще одно устройство, которое сделали примерно в этот же период — UART Splitter. Там тоже никакой гидроакустики, это просто уплотнитель 8-ми последовательных интерфейсов в один. Грубо говоря штука, которая передает в две стороны 8 UART-ов через две витые пары, по которым бежит RS-422, сейчас уже не помню, но вроде бы даже был режим работы через одну витую пару и RS-485. Мелочь конечно, но это плата с процессором и прошивкой. Выглядит он так:

Таким образом количество устройств увеличивается до 17.
Все эти вещи также поехали на известный биеннале.
Analog man in digital world
Тем временем нам не хватало рукастого и головастого спеца по аналоговой электронике с большим опытом.
В узкий круг ограниченных людей хотелось впустить только проверенного и надежного человека. Я бы даже поставил определенный артикль, если бы таковой был в русском языке, потому что мы знали его, и звали уже какое-то время.
В некоем смысле нам повезло, что в НИИ центробежные процессы превысили какой-то порог активности, и даже самые ответственные начали думать о смене обстановки. Так в марте 2018 к нам пришел Андрей.
Андрей со всей прытью внес множество улучшений и доработок в уже существующие изделия, полностью переделал электронику в надводной телефонной станции и в одно лицо запроектировал блок питания и коммутации для нашей Zim-ы. Особо не заморачиваясь он был назван Bat&Link Box
Чемодан имеет на борту LiFePO4 (Литий-железофосфатный) аккумулятор на 40 или 60 Вт*ч, один или два канала RS-422 с подключением к ПК по USB. Присутствует автоматический выбор питания — внешнее или встроенный АКБ.
Защищает от КЗ на выходе, от перенапряжения на входе, от переполюсовки, от порчи, сглаза, снимает венец безбрачия и т.п.
УКБ антенна при излучении потребляет до 3А на 12 Вольтах, излучение длится сотни миллисекунд, а кабель, по которому питается антенна и передаются данные в стандартной комплектации имеет длину 10 м, иногда делаем и 20 м. Так что для обеспечения нормального питания нужно было немного повозиться.

Пока мы увеличиваем счетчик разработанных устройств до 18, я отмечу, что во всех таких приборах мы используем 2-мм нержавейку в качестве лицевой панели. Надписи наносятся лазерной гравировкой. В наш век засилья пластика приятно прикоснуться к толстой надежной железке.
Самый самый самый
До этого мы радовались, что уместили всю необходимую электронику в большом кольце (у нас оно самое большое из тех, что мы применяем), но периодически шутили между собой, что было бы прикольно уместить все в маленькое кольцо (оно маленькое, но не самое маленькое).
Я грустил, мне хотелось сделать какой-то крутой open-source, и я просто в свободное время писал еще один модем, сильно отличающийся по сигналу и обработке от применяемых нами до того момента.
Внезапно оказалось, что код умещается во всех смыслах — и по размеру и по производительности в один 64-ногий процессор. Свободный полет мысли не ограничивался ничем, кроме фантазии и я попытался учесть всякие разные пользовательские пожелания, которые уже успел услышать к тому моменту. Модем (код) умел измерять дальность, имел режим коротких команд — можно было у другого модема запросить, например, его глубину, температуру, напряжение питания и послать еще 9 пользовательских команд, попутно измеряя время распространения (читай — наклонную дальность).
Модем умел и в просто прозрачный канал, поддерживал кодовое разделение. Причем можно было настроить разные кодовые каналы на прием и передачу. А короткие посылки можно было отправлять на любой канал и ожидать ответа тоже в любом кодовом канале.
Короткие посылки нужны, во-первых, для измерения дальности методом «запрос-ответ», а во-вторых, чем короче посылка — тем меньше вероятность что она побьется невосстановимо и больше вероятность ее успешной передачи.
Впоследствии модем обзавелся пакетным режимом передачи с логической адресацией до 255 абонентов и гарантированной доставкой.
Что же на счет скорости передачи, то сначала небольшой flashback.
Наш учитель Игорь Владимирович Бобровский, светлая ему память, научно дискутировал с одним разработчиком гидроакустических модемов из Новосибирска, и рассказывал примерно так:
«Слушали мы К. Он докладывал про свои модемы. И он что-то рассказывает, рассказывает — тут такая полоса, такая модуляция. Я его спрашиваю: скорость какая — он — 100 бит/с. Потом опять — другая схема, другая полоса, другая модуляция». При этом Бобровский активно жестикулировал руками, изображая изменения параметров сигнала. «Скорость какая? — Опять 100 бит/с. И еще схемы с другими параметрами — и опять 100 бит/с.»
Так вот
