Метод быстрого марша (Fast Marching Method)
Вступление
Метод быстрого марша (Fast Marching Method) был разработан Джеймсом Сетианом для решения краевых задач уравнения Эйконала.
Мы будем использовать этот алгоритм для расчёта полей расстояний (Distance Field) и поиска кратчайшего пути. Задача этой статьи — объяснить принцип работы алгоритма и показать примерную реализацию. Для дальнейшего чтения, в конце статьи приведены ссылки на источники.
Математическое описание FFM
Обычно в статьях описывают этот метод как «масляное пятно» растекающееся по поверхности. На рисунке показан пример распространения волны от точки в центре.

Распространение волн от точки в центре.
Масло растекается по поверхности с разной скоростью, которая зависит от функции скорости  .Предполагается, что
.Предполагается, что  прибытия в точку. Мы будем использовать FFM для двухмерного случая, но метод можно использовать и для пространств больших размерностей.
прибытия в точку. Мы будем использовать FFM для двухмерного случая, но метод можно использовать и для пространств больших размерностей.

Градиент (изменение времени) рассчитывается как евклидова норма:

Для применения алгоритма, мы должны преобразовать изображение в набор узлов, где каждый пиксель это узел. Мы будем вычислять  используя значения соседних узлов. Будем брать узел справа, слева, сверху и снизу. Для простоты, узлы имеют названия частей света.
используя значения соседних узлов. Будем брать узел справа, слева, сверху и снизу. Для простоты, узлы имеют названия частей света.

Соседние узлы. Закрашен рассматриваемый узел.
Значение рассматриваемого узла задаётся уравнением:
![(1)\ \ ||\nabla T||^2 = [max(V _{a} - V _{b},V _{a} - V _{c},0)^2 + max(V _{a} - V _{d},V _{a} - V _{e},0)^2]](https://habrastorage.org/getpro/habr/upload_files/53f/b34/a97/53fb34a97734294284f33e8f208c9982.svg)
Очевидно, что мы должны использовать самое маленькое значение из двух:

Задача сводится к решению квадратного уравнения, где  — значение рассчитываемого узла. Для решения мы будем использовать метод предложенный в работе R. Kimmel and J.A. Sethian (1996):
— значение рассчитываемого узла. Для решения мы будем использовать метод предложенный в работе R. Kimmel and J.A. Sethian (1996):


Мы будем рассчитывать значения для каждого узла, выбирая сначала ближайшие. Алгоритм выполняется итерационно пока не пройдёт все узлы.

Распространение рассмотренных узлов от начальной точки в центре.
Описание реализации FFM
Для начала нам нужно получить набор узлов для расчёта полей расстояний. Можно сгенерировать их, а можно взять изображение и конвертировать его в набор узлов.
Вот пример структуры Node. Весь код приведён на C#.
public enum StateNode
{
KNOWN,
NEIGHBOUR,
FAR,
BLOCK,
WAY
}
public struct Node
{
public int x;
public int y;
public StateNode state;
public double distance;
}KNOWN мы будем помечать уже известные узлы,
NEIGHBOUR — соседи уже известных узлов,
FAR — не посещённые узлы,
BLOCK — препятствие (узел, который не может использоваться как путь),
WAY — узел пути (понадобится для рисования кратчайшего пути из точки А до Б, но необязателен для создания карты расстояний).
Сам Node имеет координаты x, y, состояние и собственно значение distance. Можно также сохранять в узлах значение цвета пикселя, для восстановления исходного изображения.
Узлы будем помещать в
List> nodes = new List>(); Такая структура данных поможет проще обращаться к соседним узлам. Например:
int x = node.x;
int y = node.y + 1;
Node node_neighbour = nodes[x - 1][y - 1]; // сосед сверхуПолучить списки узлов можно разными способами и это не так важно, поэтому сначала я опишу реализацию самого алгоритма, а в конце статьи покажу пример преобразования изображения.
Так же нам нужно будет постоянно находить ближайшие узлы с наименьшим значением DISTANCE. Для этого будем использовать «двоичную кучу.» Реализовать кучу можно любым способом, главное, чтобы мы могли легко добавлять туда узлы и доставать от туда узел с наименьшим значением DISTANCE.
// взять наименьшее значение neighbour
Node min_neighbour = binaryHeapNodeClass.getMinimum();
// добавление узла в кучу
binaryHeapNodeClass.add(node);
// получение количества узлов в куче
binaryHeapNodeClass.heapSize;
// перестройка дерева после удаления узла в основании.
binaryHeapNodeClass.heapify(0);Сам алгоритм
Перед началом основного цикла, мы должны добавить первые узлы в двоичную кучу. Первыми neighbours будут уже известные узлы, которые являются входными данными:
private void AddKnowNodeFromImage()
{
for(int i = 0; i < nodes.Count; i++) // immage height
{
for(int j = 0; j < nodes[0].Count; j++) // image width
{
if (nodes[i][j].state == StateNode.KNOWN) // проверяем, что это нужный узел
{
Node node_know = nodes[i][j];
node_know.distance = 0;
node_know.state = StateNode.NEIGHBOUR;
nodes[i][j] = node_know;
binaryHeapNodeClass.add(node_know); // добавляем узлы в кучу
}
}
}
}Алгоритм:
Если двоичная куча не пуста, то начать алгоритм. Если пуста — закончить алгоритм.
Взять neighbour с наименьшим distance из кучи и удалить его из кучи.
Вычислить значения расстояний для соседей этого узла.
Переместить соседей этого узла в кучу. Сам этот узел пометить как KNOW и обновить его значение в общем списке узлов.
Перейти к шагу 1.
while(binaryHeapNodeClass.heapSize > 0)
{
// взять наименьшее значение neighbour(узел автоматически удаляется из кучи)
Node min_neighbour = binaryHeapNodeClass.getMinimum();
binaryHeapNodeClass.heapify(0);
// вычислить значение соседей
// переместить соседей в neighbours
CalculateNeighboursThisNode(min_neighbour);
// пометить узел как KNOW
min_neighbour.state = StateNode.KNOWN;
nodes[min_neighbour.x - 1][min_neigh.y - 1] = min_neighbour;
// повторить
}Мы берём соседей сверху, справа, снизу и слева, и добавляем их в кучу. Если узел вышел за границы сетки, то ничего не возвращаем.
private void CalculateNeighboursThisNode(Node node)
{
TryNeighbourNode(node.x, node.y + 1);
TryNeighbourNode(node.x, node.y - 1);
TryNeighbourNode(node.x - 1, node.y);
TryNeighbourNode(node.x + 1, node.y);
}
private void TryNeighbourNode(int x, int y)
{
try
{
Node node = nodes[x - 1][y - 1];
if (node.state == StateNode.FAR) // Проверяем, что узел не посещённый
{
Node node_neighbour = node;
node_neighbour.state = StateNode.NEIGHBOUR;
//расчитываем значение расстояния для это узла
node_neighbour = CalculateDistanceThisNode(node_neighbour);
nodes[x - 1][y-1] = node_neighbour;
binaryHeapNodeClass.add(node_neighbour); // добавляем в кучу
}
}
catch (ArgumentOutOfRangeException)
{
// Если узла не существует, то ничего не возвращаем
}
}Далее приводится пример расчёта расстояния для конкретного узла. Если мы вышли за границы списка, то возвращаем узел с максимальным значением.
private Node CalculateDistanceThisNode(Node node)
{
Node neighbours_North = TryNode(node.x, node.y + 1);
Node neighbours_South = TryNode(node.x, node.y - 1);
double a = Math.Min(neighbours_North.distance,neighbours_South.distance);
Node neighbours_West = TryNode(node.x - 1, node.y);
Node neighbours_East = TryNode(node.x + 1, node.y);
double b = Math.Min(neighbours_West.distance, neighbours_East.distance);
double T = CalculateDistance(a, b);
return node;
}
private Node TryNode(int x, int y)
{
Node node;
try
{
node = nodes[x - 1][y - 1];
}
catch (ArgumentOutOfRangeException)
{
node = new Node()
{
// присваиваем макс. большое значение
distance = double.PositiveInfinity
};
}
return node;
}
public double CalculateDistance(double a, double b)
{
// блок с формулами (2)
double F = 1;
double T;
if(F > Math.Abs(a - b))
{
T = (a + b + Math.Sqrt(2 * 1/F * 1/F - (a-b)*(a-b) )) / 2;
}
else
{
T = 1/F*1/F + Math.Min(a, b);
}
return T;
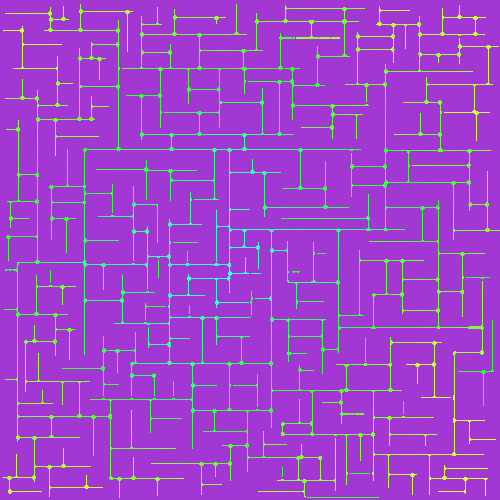
}Я взял картинку из Интернета и преобразовал изображение в узлы. Стенки лабиринта пометил как BLOCK, то есть улзы которые не могут использоваться для создания пути и расчёта расстояний. Цвет меняется от зелёного к фиолетовому. Учитывайте, что все значения distance при рендере нормализуются, поэтому сравнивать два разных рисунка нельзя.

Из рисунка видно, что дольше всего идти до центра лабиринта и до другой стороны перегородки в начале.
Поиск кратчайшего пути до точки
Для поиска кратчайшего пути, мы будем идти в обратную сторону — от точки назначения до исходной. Мы будем перемещаться по узлам по определённому правилу. Путь из посещённых узлов и будет кратчайшим.
Нам нужно отбирать узлы, где значение distance уменьшается, и из них выбирать узлы с наименьшим значением distance. Мы продолжаем идти по узлам, пока не попадём на исходный узел (он имеет значение distance = 0).
Node way_node = target_node; // target node это узел до которого нужно рассчитать путь
while (way_node.distance != 0)
{
way_node = GetNextWayNode(way_node); // получаем следующий узел
way_nodes.Add(way_node); // помещаем узел в "узлы пути"
}
AddSizeWayLine(3);Для поиска узла с наименьшим значением distance помещаем соседние узлы в бинарную кучу.
private Node GetNextWayNode(Node node)
{
int x = node.x - 1;
int y = node.y - 1;
List neighbours = new List();
Node node_1 = TryGetNeighbourNode(x, y + 1); // top
Node node_2 = TryGetNeighbourNode(x + 1,y + 1); //top-right
Node node_3 = TryGetNeighbourNode(x + 1,y); // right
Node node_4 = TryGetNeighbourNode(x + 1, y - 1); //down-right
Node node_5 = TryGetNeighbourNode(x, y - 1); // down
Node node_6 = TryGetNeighbourNode(x - 1, y - 1); // down-left
Node node_7 = TryGetNeighbourNode(x - 1, y); //left
Node node_8 = TryGetNeighbourNode(x - 1, y + 1); // top-left
neighbours.Add(node_1);
neighbours.Add(node_2);
neighbours.Add(node_3);
neighbours.Add(node_4);
neighbours.Add(node_5);
neighbours.Add(node_6);
neighbours.Add(node_7);
neighbours.Add(node_8);
foreach (Node node_max in neighbours)
{
// проверяем что distance этого узла меньше чем у узла пути, и узел существует
if(node_max.distance < node.distance && node_max.distance != -1)
{
binaryHeapNode.add(node_max); // добавляем в бинарную кучу
}
}
Node node_next = binaryHeapNode.getMinimum(); // получаем следующий узел из кучи
binaryHeapNode.heapify(0); // перестраиваем кучу после удаления узла
return node_next;
}
private Node TryGetNeighbourNode(int x, int y)
{
Node node = new Node();
try
{
node = nodes[x][y];
}
catch (ArgumentOutOfRangeException)
{
node.distance = -1; // если узла не существует, то присваиваем значение -1
}
return node;
} Если брать путь в 1 пиксель, то путь будет очень тонким и его будет тяжело увидеть. Поэтому увеличим ширину пути с помощью функции AddSizeWayLine ()
private void AddSizeWayLine(int size)
{
foreach(Node way_node in way_nodes) // берём узлы пути
{
List nodes_neighbours = new List();
int node_x = way_node.x - 1;
int node_y = way_node.y - 1;
for(int i = 1; i <= size; i++) // берём соседние узлы пути
{
Node node_1 = nodes[node_x][node_y + i];
Node node_2 = nodes[node_x + i][node_y];
Node node_3 = nodes[node_x][node_y - i];
Node node_4 = nodes[node_x - i][node_y];
nodes_neighbours.Add(node_1);
nodes_neighbours.Add(node_2);
nodes_neighbours.Add(node_3);
nodes_neighbours.Add(node_4);
}
foreach(Node neighbour in nodes_neighbours) // присваиваем узлам статус WAY
{
if(neighbour.state == StateNode.KNOWN) // проверяем, что узлы не BLOCK
{
Node new_node = neighbour;
new_node.state = StateNode.WAY;
nodes[neighbour.x - 1][neighbour.y - 1] = new_node;
}
}
}
} 
Кратчайший путь
Расчёт ошибки вычислений
Для расчёта ошибки возьмём точку по центру и рассчитаем расстояние с помощью алгоритма.
Результат работы алгоритма:

1001×1001 пикселей. Максимальное расстояние 709,2054797499496
Для расчёта реального расстояния будем использовать теорему Пифагора:
Node know_node; // наша точка в центре, от которой рассчитывается расстояние
private double CalculateErrorThisNode(Node node)
{
double real_distance = CalculateRealDistance(node); // расчёт реального расстояния
double error = Math.Abs(real_distance - node.distance); // расчёт ошибки
return error;
}
private double CalculateRealDistance(Node node)
{
double real_distance = Math.Sqrt((node.x - know_node.x) * (node.x - know_node.x)
+ (node.y - know_node.y) * (node.y - know_node.y));
return real_distance;
}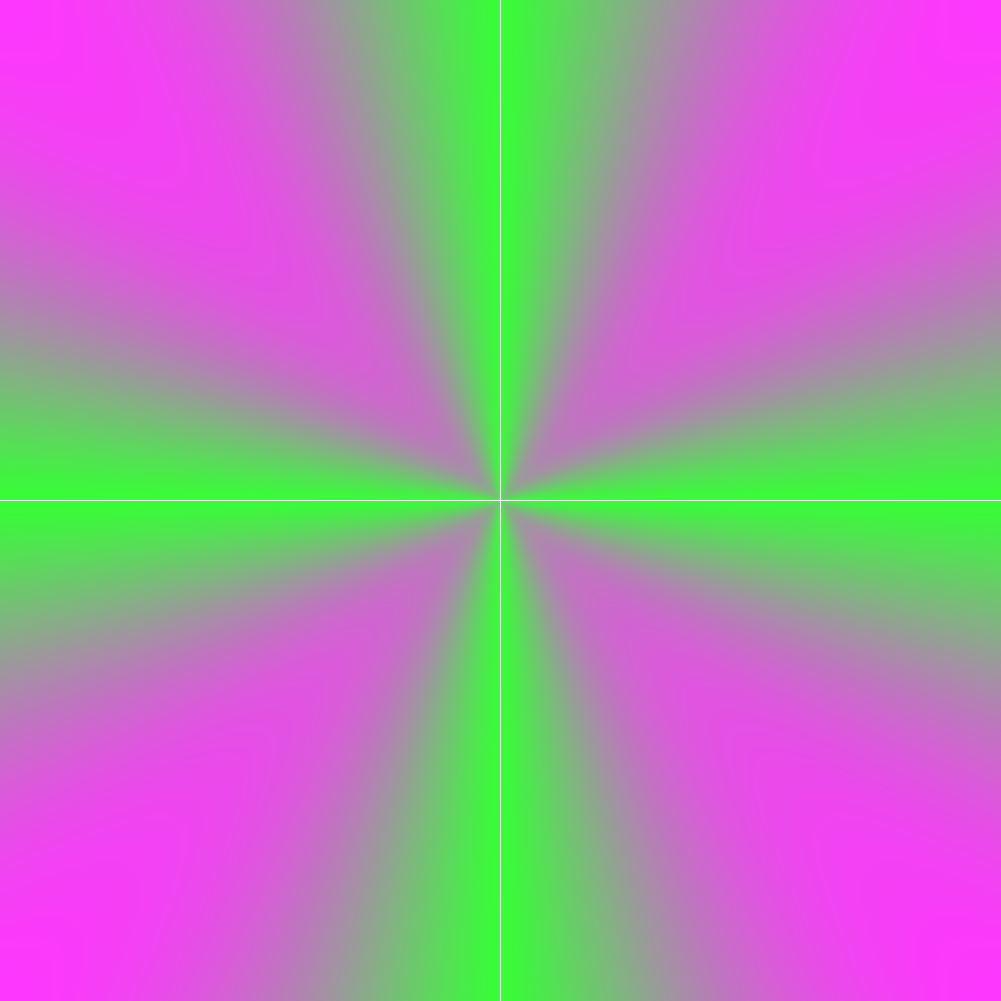
Максимальная абсолютная ошибка 2,098698563402081
Видно, что 0 ошибка (белый цвет) на горизонталях и вертикалях, а максимальная ошибка (фиолетовый) на диагоналях.
Пример преобразования изображения в узлы
struct Pixel
{
public byte r, g, b, a;
public int x, y;
}
public List> GetListNodes() { return nodes; }
public void ConvertToNode()
{
byte[] bytes_image = image.Data;
GeneratePixel(bytes_image);
for (int i = 0; i < image.Height; i++)
{
nodes.Add(new List());
for (int j = 0; j < image.Width; j++)
{
Node node = new Node()
{
x = i+1,
y = j+1,
distance = double.PositiveInfinity,
state = StateNode.FAR
};
// получаем пиксель соотвествующий данному узлу
Pixel pixel = pixels[image.Height * (j) + i];
// ищем пиксели не белого цвета и помечаем их как KNOWN
// в моём случае чёрное изображение на белом фоне
if (pixel.r != 255 || pixel.g != 255 || pixel.b != 255)
{
node.state = StateNode.KNOWN;
}
nodes[i].Add(node);
}
}
}
private void GeneratePixel(byte[] bytes_image)
{
int index_pixel = 0;
int x = 1, y = 1;
for (int i = 0; i < bytes_image.Length; i += 4)
{
Pixel pixel = new Pixel()
{
r = bytes_image[i],
g = bytes_image[i + 1],
b = bytes_image[i + 2],
a = bytes_image[i + 3],
x = x,
y = y
};
index_pixel++;
x++;
if (index_pixel % image.Height == 0)
{
y++;
x = 1;
}
pixels.Add(pixel);
}
} Другие интересные результаты работы алгоритма

Цвет меняется от цвета морской волны до жёлтого
Цвет от цвета морской волны до жёлтого
Источники
R. Kimmel and J.A. Sethian (1996). Fast Marching Methods for Computing Distance Maps and Shortest Paths.
Jakob Andreas Bærentzen (2001). On the implementation of fast marching methods for 3D lattices.
Dieuwertje Alblas (2018). Implementing and analysing the fast marching method
