Marigold-DC

Привет! Сегодня я хочу рассказать про сеточку Marigold-DC решающую задачу Depth Completion.
Пользуясь случаем, оставляю ссылку на свой канал: notmagicneuralnetworks
Задача Depth Completion
Построение 3D мира стало необходимым с появлением автопилотов для построения карт и планирования маршрутов.
Лидар (Light Detection and Ranging) — это устройство, которое измеряет расстояние до объекта с помощью лазера. Устройство выстреливает лазерный луч и ловит его отражение, а по затраченному времени вычисляется расстояние до объекта. Количество таких лучей зависит от разрешения лидара. Их можно увидеть на роботах-пылесосах, беспилотном транспорте.
На видео показан 3D мир беспилотного автомобиля, который он видит с помощью лидара.
Безусловное преимущество лидаров в том, что они обладают высокой точностью и скоростью, однако, лучи все-таки дискретные и 3D карта мира остается довольно разряженной.
Задачка Depth Completion пытается получить плотную 3D карту по лидарным точкам и изображениям с камер. В результате для каждого пикселя изображения должна быть известна глубина.

Marigold-DC — это одно из решений такой задачи. Marigold-DC является доработанной моделью Marigold, которая решает задачу Monodepth (построение карты глубины только по изображениям). В свою очередь, Marigold основана на Latent Diffusion Models (Stable Diffusion). А Stable Diffusion использует в своей архитектуре модель U-Net.
В данной статье я попыталась разобраться в идеях перечисленных выше архитектур.
Marigold-DC → Marigold → Stable Diffusion → U-Net
Marigold-DC
Мотивируют авторы свою работу (Marigold-DC) так, что есть различные сверточные сети, решающие задачу Depth Completion, однако, они плохо обобщают из-за недостатка обучающих данных. В то же время, с куда лучшим качеством, решается задача Monodepth, как раз за счет разнообразия датасетов и хороших знаниях о структуре мира. И вот, авторы решили объединить решение задачи Monodepth с Depth Completion. Кратко как они это сделали:
Взяли генеративую модель Marigold, которая решает задачу Monodepth и возвращает относительную карту глубины на промежутке
![[0, 1]](https://habrastorage.org/getpro/habr/upload_files/d9d/dba/229/d9ddba2290fe8e4c1389878fd2f84d3a.svg) .
.По лидарным точкам обучили параметры scale
 и shift
и shift  , с помощью которых можно перейти в метрическое пространство по формуле
, с помощью которых можно перейти в метрическое пространство по формуле  в промежуток
в промежуток![[b, a + b]](https://habrastorage.org/getpro/habr/upload_files/66f/eeb/4ec/66feeb4ec67bcde9b8b8b5c4f6338e35.svg) .
.вычислили и вернули метрическую карту глубины.
При этом, при попытке подобрать параметры  и
и  с помощью метода наименьших квадратов дали значительно хуже результаты. Авторы списывают это на то что ground truth данные тоже не идеальны и недостаточно точные.
с помощью метода наименьших квадратов дали значительно хуже результаты. Авторы списывают это на то что ground truth данные тоже не идеальны и недостаточно точные.
Саму же Marigold не обучают, а использую как есть, с ее обширными знаниями о мире. Оптимизируют параметры  ,
,  и инициализированный шум в латентном пространстве карты глубины
и инициализированный шум в латентном пространстве карты глубины  о котором будет чуть пониже.
о котором будет чуть пониже.

Диффузионоки
Прежде чем разбираться в Marigold надо немного вспомнить как работают диффузионные модели.
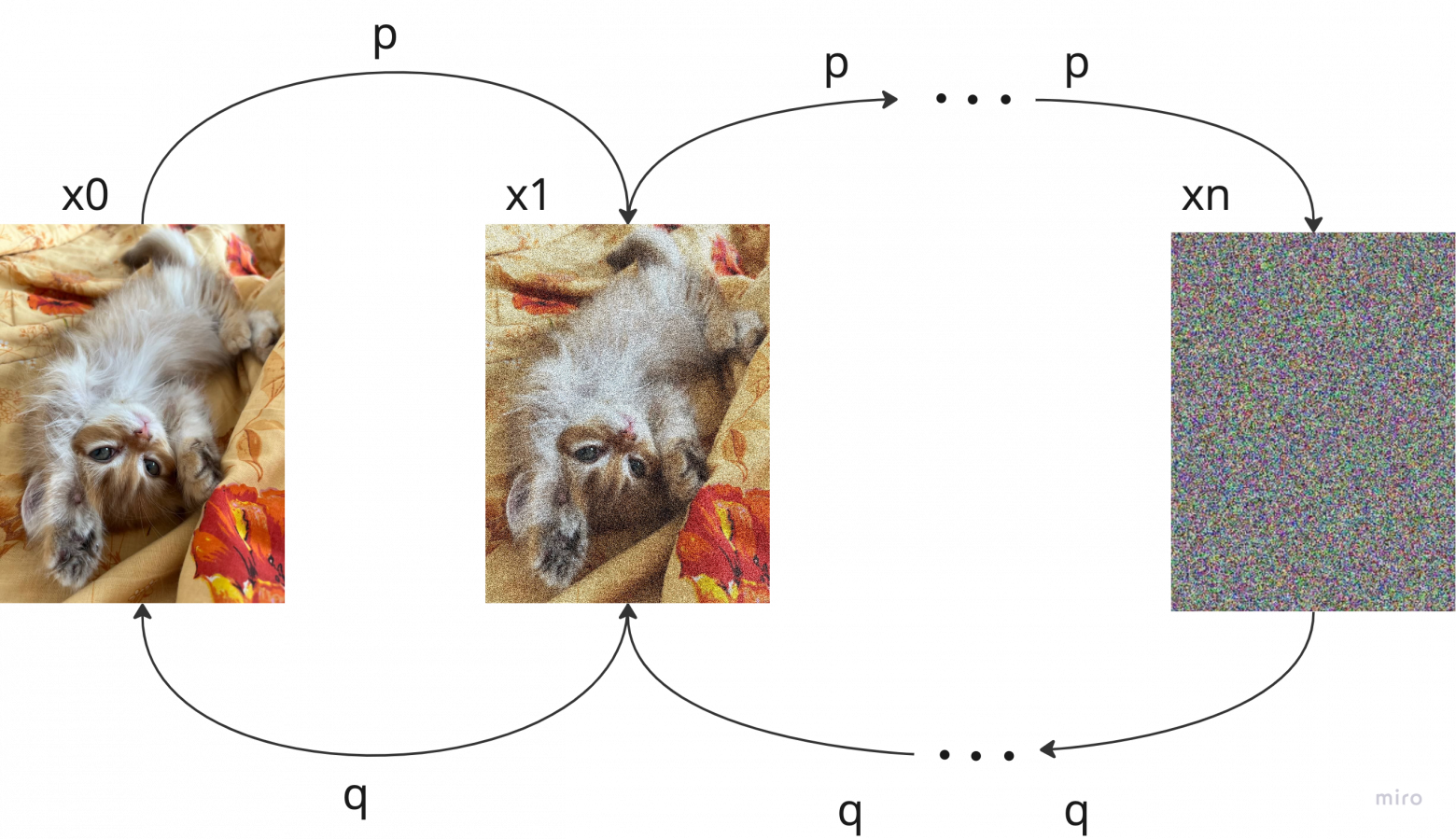
Пусть у нас есть изображение  , на котором изображен. На каждой итерации
, на котором изображен. На каждой итерации  будем зашумлять его каким-то
будем зашумлять его каким-то  , а саму функцию зашумления обозначим
, а саму функцию зашумления обозначим  . В конце-концов вместо котика у нас должен остаться чистый шум.
. В конце-концов вместо котика у нас должен остаться чистый шум.
Обучим нейронную сеть , которая на каждой итерации, наоборот, будет пытаться очистить изображение от шума. Тогда, после такого обучения, когда мы возьмем какое-то
, которая на каждой итерации, наоборот, будет пытаться очистить изображение от шума. Тогда, после такого обучения, когда мы возьмем какое-то  и пропустим
и пропустим  раз через
раз через  , то получим нашего котика, но уже не совсем такого, какой он был изначально.
, то получим нашего котика, но уже не совсем такого, какой он был изначально.
Пусть теперь модель  находит шум в момент времени
находит шум в момент времени  . Тогда процесс очищения будет состоять в том что мы будем вычитать этот шум из изображения, а в качеcтве функции потерь возьмем
. Тогда процесс очищения будет состоять в том что мы будем вычитать этот шум из изображения, а в качеcтве функции потерь возьмем  от реального шума
от реального шума  и найденного шума
и найденного шума  в момент времени
в момент времени  .
.
![L_{LDM} := \mathbb{E}_{\mathcal{E}(x), \epsilon \sim \mathcal{N}(0,1), t}\left[ \left\| \epsilon - \epsilon_{\theta}(z_t, t) \right\|_2^2 \right]](https://habrastorage.org/getpro/habr/upload_files/c17/9bf/5d9/c179bf5d9dccf798c64b6d1e133ac64c.svg)
При этом у диффузионных моделей есть два больших недостатка:
Они требуют очень много данных для обучения.
Процесс генерации занимает очень много времени.
Эти проблемы пытались решить многие сетки, и одна из них — Latent Diffusion Models (Stable Diffusion).
Stable Diffusion
Идея Stable Diffusion заключается в том чтобы перейти от пиксельного пространства в латентное, которое гораздо меньших размерностей. Таким образом мы будем тратить гораздо меньше вычислительных ресурсов и процесс генерации будет происходить быстрее.

Вот как выглядит Latent Diffusion Models.

В верхней части входное изображение  кодируется с помошью энкодера
кодируется с помошью энкодера в латентное пространство (и становится
в латентное пространство (и становится  ) и запускается процесс с зашумлением. Ниже, нейронная сеть U-Net, наоборот, пытается восстановить изображение из шума. После, декодируем с помощью
) и запускается процесс с зашумлением. Ниже, нейронная сеть U-Net, наоборот, пытается восстановить изображение из шума. После, декодируем с помощью  и получаем обратно изображение.
и получаем обратно изображение.
При обучении автокодирощика используется довольно сложная лосс-функция:

 — (reconstruction) это
— (reconstruction) это  между оригинальным изображением
между оригинальным изображением  и изображением после применения энкодера и декодера
и изображением после применения энкодера и декодера  — потеря данных автокодировщика.
— потеря данных автокодировщика.
 — (regularization) это
— (regularization) это  -дивергенция между латентными данными и нормальным распределением (хотим чтобы они были похожи). Этот лосс выступает в форме регуляризации в латентном пространстве.
-дивергенция между латентными данными и нормальным распределением (хотим чтобы они были похожи). Этот лосс выступает в форме регуляризации в латентном пространстве.
 — (adversarial manner following) потери генеративно-состязательной сети. Генератор стремится максимизировать вероятность того, что дискриминатор ошибается, а дискриминатор — минимизировать свою ошибку. В идеале, генератор научится создавать такие данные, которые трудно отличить от реальных.
— (adversarial manner following) потери генеративно-состязательной сети. Генератор стремится максимизировать вероятность того, что дискриминатор ошибается, а дискриминатор — минимизировать свою ошибку. В идеале, генератор научится создавать такие данные, которые трудно отличить от реальных.
Таким образом у Stable Diffusion два этапа обучения:
Обучение энкодера и декодера (
 и
и  ) для представления изображения в латентном пространстве и его восстановления.
) для представления изображения в латентном пространстве и его восстановления.Обучение диффузионной модели
 . На этом этапе энкодер и декодер уже должны быть обучены.
. На этом этапе энкодер и декодер уже должны быть обучены.

Denoising U-Net
U-Net свое название получила благодаря U-образной форме, где левая и правая часть являются энкодером и декодером соответственно. Появилась она еще в 2015 году в контексте задачи сегментации.
Эта модель является общепринятой и, наверное, самой ходовой, в контексте диффузионных моделей.

Состоит U-Net из конволюций, Res-блоков, конкатенаций и attention-блоков:
Конволюции работают на разном разрешении: чем глубже слой, тем меньше изображение, но больше каналов.
ResBlock-и почти не отличаются от ResNet: они содержат в себе конволюции, активации и нормализации, и это все конкатенируется с необработанной через этот блок частью фичей.
Concatination соединяет фича-мапы которые не прогонялись в глубокие слои с тем что прогонялись, вдоль каналов. Это делается для лучшей сходимости и работы сети.
Про attention в блоке сonditioning.
Conditioning
С помощью сonditioning мы говорим модели Stable Diffusion что именно нам нужно сгенерировать. И удобно, что на вход мы можно подавать что угодно: картинки, текст и тд.

Главное закодировать эту информацию в латентное пространство. Например, можно генерировать изображения по текстовому описанию. В случае Marigold мы генерируем карту глубины по изображению.
Добавлять при этом информацию можно разными способами с помощью switch: путем простого объединения с изображением, либо используя QKV-attention.
Для Marigold карта глубины выступала бы в качестве запроса Q (query), а изображение в виде набора пар ключ-значение K (key), V (value).
Marigold
Наконец, можно взглянуть на Marigold.
Во время обучения зашумляется и восстанавливается карта глубины, а изображение добавляется как сonditioning. Далее, мы видим всю ту же схему Stable Diffusion: перевод в латентное пространство с помощью энкодеров, добавление случайного шума и восстановление карты глубины.


На инференсе же мы подаем только изображение и получаем карту глубины (потому что Marigold решает задачу Monodepth).

Собираем Marigold-DC

Переводим изображение
 в латентное пространство с помощью Stable Diffusion Encoder, получаем
в латентное пространство с помощью Stable Diffusion Encoder, получаем  .
.Инициализируем латентную глубину из нормального распределения
 .
.Конкатенируем
 и
и  .
.Пропускаем через U-Net для получения оценки уровня шума
 .
.Далее, вместо того чтобы делать sheduler step мы применяем формулу Твиди для получения «preview depth map» и пропускаем через Stable Diffusion Decoder. Получаем относительную карту глубины на промежутке [0, 1].
Пересчитываем карту глубины в метрическое пространство с помощью параметров
 (scale) and
(scale) and  (shift). Если у нас первая итерация, то инициализируем следующим образом:
(shift). Если у нас первая итерация, то инициализируем следующим образом:  и
и  , где
, где  — лидарные точки.
— лидарные точки.Считаем Loss по полученной карте глубины и лидарным точкам (только там где лидарные точки определены) как равновзвешенные MAE и MSE.
Обновляем параметры
 ,
,  и
и  . Сама Marigold при этом не обучается, используется как есть.
. Сама Marigold при этом не обучается, используется как есть. Делаем sheduler steps.
После всех sheduler steps делаем финальную denoising iteration и декодируем Stable Diffusion Decoder, получаем относительную карту глубины.
Применяем уже обученные
 (scale) and (shift).
(scale) and (shift).Возвращаем предсказанную карту глубины в метрическом пространстве.
На практике
На практике Marigold-DC действительно показала хорошие результаты. Однако, поскольку сеть генеративная, она может додумывать какие-то атрибуты сцены.
Для настройки предоставлено два гиперпараметра:
processing_resolution — разрешение, в котором обрабатывается изображение во время генерации (чем меньше processing_resolution, тем больше глюков).
num_inference_steps — количество шагов, используемых в процессе диффузионной генерации изображения (чем больше шагов, тем больше какой-то ряби).
Оптимальные гиперпараметры указаны в статье Marigold-DC и, в целом, они совпали с теми что я считала для свой задачи (брала чуть меньше num_inference_steps).
Проблема галлюцинаций часто возникает в областях, где нет лидарных точек. Например, если область очень далекая и лучи лидара оттуда не возвращаются.

И, скорее всего, из-за особенностей датасета, на котором обучалась Marigold, она часто предсказывает лишние датали на растениях или растения в пустых областях.

Полезные ссылки:
Marigold-DC: Zero-Shot Monocular Depth Completion with Guided Diffusion
Repurposing Diffusion-Based Image Generators for Monocular Depth Estimation
High-Resolution Image Synthesis with Latent Diffusion Models
U-Net: Convolutional Networks for Biomedical Image Segmentation
The KITTI Vision Benchmark Suite
CV Week Школы анализа данных
Генеративные модели, Хендбук
Stable Diffusion Clearly Explained!
