Магнитный редуктор для бесколлекторного мотора

В данной статья я расскажу о магнитном редукторе, разработанном нами. Данный редуктор планируется использовать в связке с бесколекторным мотором. В статье будут рассказано о возможной области применения данного редуктора, о его плюсах и минусах по сравнению с обычными редукторами.
Введение
Бесколекторные электродвигатели (BLDC) обладают крайне высокой мощностью при минимальном размере. Это достигается благодаря мощным редкоземельным магнитам. При создании мотора в маленьком форм факторе, такие двигатели не имеют конкуренции.
Однако, несмотря на высокую мощность, небольшой размер мотора накладывает на него множество ограничений таких как: небольшой момент, высокие рабочие обороты, маленькая площадь охлаждения. Данный ограничения не позволяют использовать весь потенциал мотора. Так, например, мотор форм-фактора 540(D=36 мм L=54 мм) способен выдавать мощность свыше киловатта с достаточно хорошим КПД, но это возможно только при очень высоких оборотах, когда эту мощность снять с мотора становится достаточно сложно. В номинальном режиме такой мотор без принудительного обдува может выдавать 200–400ватт.
Основным направлением нашего коллектива MotoChrome является проектирование и создание бесколекторных моторов. При проектировании мотора для одного из заказчиков мы как раз столкнулись с проблемами описанными выше. Заказчику был нужен мотор небольшим диаметром, но при этом достаточно высоким моментом и КПД. Чтобы соблюсти требования мотор получился длиной почти полметра при диаметре в 40 мм. Мотор получился достаточно дорогим и очень сложным в сборке. При этом, для достижения тех же мощностных параметров, можно сделать мотор в 3 раза меньше, но с использованием редуктора. И в итоге выбран был именно этот вариант.

Использование редуктора кажется хорошим решением. Но с ним возникает множество других проблем, что не позволяет применять их полноценно во всех моторах.
- дополнительный узел, имеющий вероятность поломки, и ограниченный ресурс работы
- увеличение габаритных размеров;
- повышенная шумность, что может быть критичным в работе подводных устройств;
- большинство механических редукторов имеют ограничения по передаваемому крутящему моменту и скорости вала на входном валу редуктора, что в свою очередь накладывает дополнительные ограничения/требования к электромотору.
Подбирая редуктор мы упёрлись в две основные проблемы. 1) Что бы редуктор смог реализовать весь потенциал безколекторного мотора, он должен быть размером сравнимым с размером мотора. С ним мотор перестаёт быть компактным. 2) Большинство механических редукторов не способны работать на высоких оборота (>15000 RPM), а нам интересны именно высокие обороты. Только 1…2 компании согласились взять заказ на требуемый редуктор и поставить его через 3 месяца после получения оплаты. Какова будет его надежность и стойкость нам еще предстоит выяснить, однако трудности, связанные с поиском нужного редуктора, заставили нас думать над этой проблемой дальше.
Неплохим вариантом, с нашей точки зрения, оказался магнитный редуктор. Они пока не получили широкого применения и про них достаточно мало информации, поэтому мы решили поглубже разобраться в данном вопросе и сделать редуктор самостоятельно. Это нам позволит отработать подход к его моделированию и позволит в будущем рассчитывать его параметры.
Магнитный редуктор
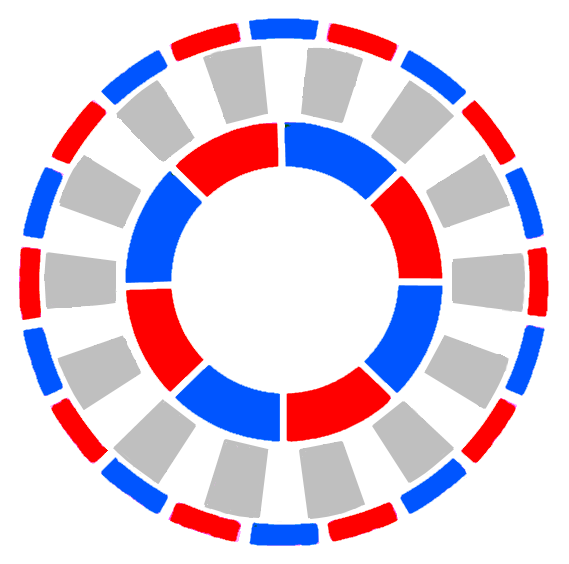
Магнитный редуктор мы решили делать по распространённой схеме, которая представляет собой аналог планетарного редуктора. Магниты в центре являются «солнечной шестерней», магниты снаружи — «зубчатый венец (эпицикл)», между ними зубцы из магнитомягкого материала выполняют роль «водила».
Такая конструкция обладает максимальным моментом удержания в минимальном объёме и она хорошо подходит под нашу задачу. В результате нами был спроектирован и изготовлен следующий образец.
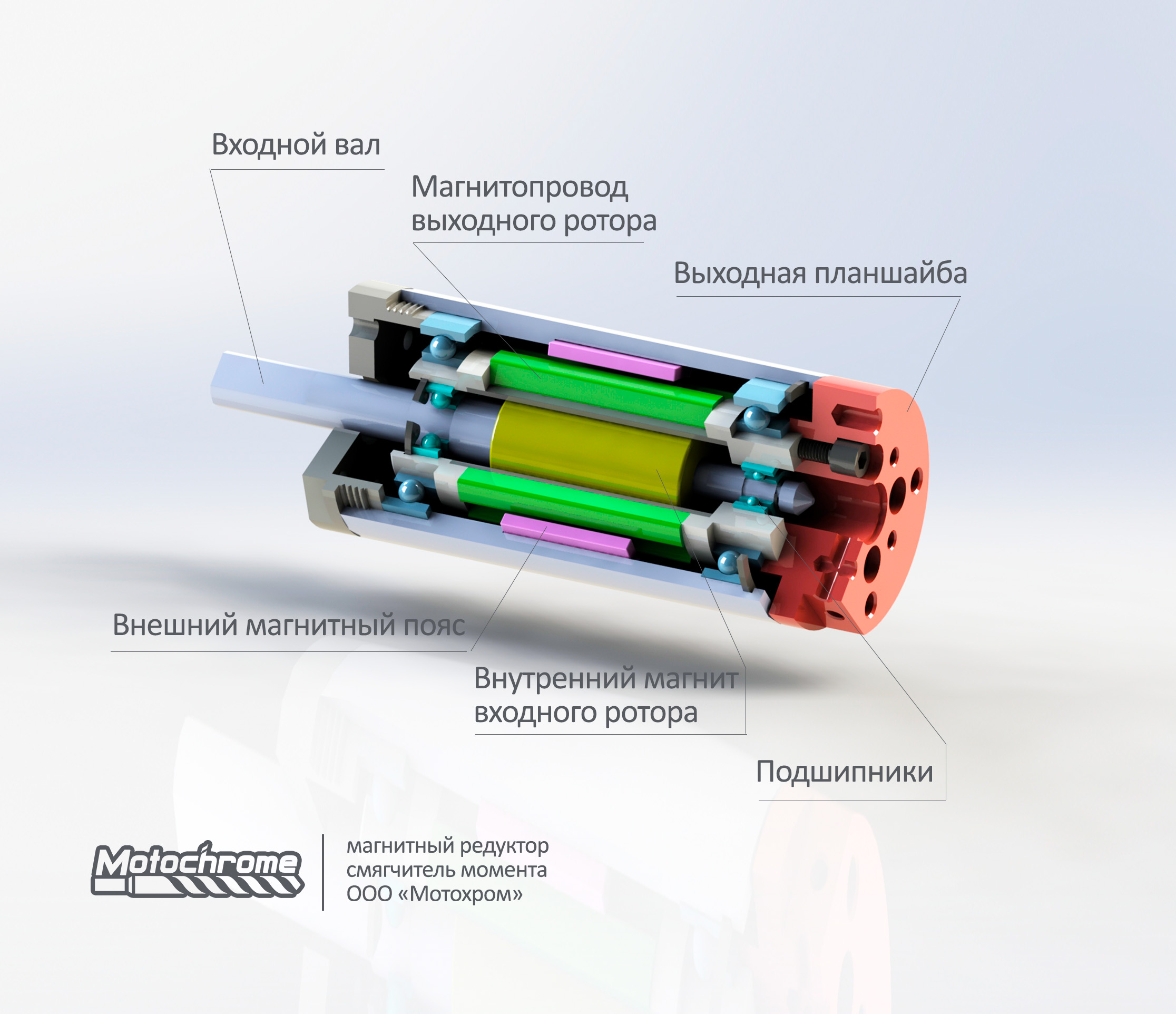
Диаметр данного образца 36 мм. Входная часть редуктора выполнена по стандарту NEMA 17. Вместо выходного вала мы сделали универсальную планшайбу, позволяющую прикреплять к ней различную нагрузку в опытных работах, тестах и экспериментах, а при необходимости и установить вал, благодаря базовому посадочному отверстию в центре планшайбы. К слову сказать, концепцию универсальных креплений мы применили и в нашем моторе «Electron», который мы готовим к серийному производству и продажи на территории РФ (о нем мы напишем отдельную статью).
Параметры получившегося редуктора оказались достаточно близки к расчётным. Он обладает понижением 1:10 и способен удержать на выходном валу момент 0.53Нм при статической нагрузке. Это достаточно хороший показатель для таких габаритов. Для сравнения, мотор в тех же габаритах выдаст такой момент с КПД ниже 50%, а система с данным редуктором будет обладать КПД 80%.
Кроме того, редуктор получился очень плавным и тихим. В нём абсолютно не ощущаются какие-либо рывки при вращении, момент передаётся очень мягко. Данное свойство определило название, данное нами редуктору — «Smoother».
Выводы
После начального тестирования мы смогли выделить следующие плюсы магнитного редуктора по сравнению с механическим:
- Магнитный редуктор тихий
- Не боится больших оборотов. Слабым звеном в нём являются только подшипники, которые также и ограничивают мотор.
- Долговечный. В нём, как и в моторе нечему ломаться кроме подшипников.
- Редуктор способен плавно подавать и удерживать момент. Например, если сделать захват на таком редукторе и зажать хрупкий предмет, то рывок мотора не разрушит его.
- Такой редуктор защищён от перегрузок. Если на вале механического редуктора превысить допустимую нагрузку, то шестерни в нём разрушатся и заклинит, что также может вызвать повреждение мотора или контроллера. Магнитный редуктор просто провернётся и не сломается, а мотор не остановится.
Также мы выявили и ряд недостатков:
- Момент редуктора ограничен объёмом и максимальной силой магнитов. Механический редуктор способен передать гораздо больший момент в том же объёме.
- Магниты редуктора чувствительны к температуре и могут размагнититься при перегреве.
- Так как в редукторе используются магниты из редкоземельных материалов, создание габаритных редукторов такого типа затруднительно.
Исходя из полученных результатов мы сформировали области применения для редукторов такого типа:
- в биологии, медицине и других процедурах захвата и перемещения предметов, где требуется точное позиционирование с одной стороны (что достигается безлюфтовостью редуктора) и присутствует высокий риск повреждения предметов, с которыми работает манипулятор, например, тканей и органов человека (присутствующая в магнитном редукторе мягкость выходного ротора и защита от перегрузок позволит ограничить максимальной усилие воздействия на оперируемый предмет).
- в промышленных устройствах, в которых в ограниченных пространствах работают высокоскоростные двигатели (электро или пневматические), крутящий момент которых нужно увеличить, а скорость понизить до требуемого разрешённого значения.
- в подводных приборах, где предъявляются высокие требования к низкой шумности изделия
На данный момент тестирование редуктора продолжается. Мы проводим его испытание в динамике при различных нагрузках и скоростях. Если всё пройдёт успешно, то мы сможем внедрить данную разработку в реальный проект.
