Квадрокоптеры — как все начиналось?
Современный квадро (гекса, окто) коптер — это достаточно мощное «вычислительное» устройство, способное управляться со смартфона по WiFi, зависать в одной точке, летать по маршруту и пр. Купить такой аппарат сейчас может любой желающий. А с чего все начиналось?
Как летает квадрокоптер?
Чтобы понимать суть технических решений, разберемся немного как вообще квадрокоптер летает. По сути, квадрокоптер — это неустойчивая система. Если взять 4 мотора, и просто подключить их к батарейке, квадрокоптер никуда не полетит, он просто перевернется т.к. сила тяги моторов никогда не будет идентичной. И тут вступает в действие электроника. На борту квадрокоптера есть центральная «плата управления», ключевой частью которой является блок датчиков. В простейшем случае, это трехосевой гироскоп. Микроконтроллер постоянно считывает данные с гироскопов, и как только гироскоп «чувствует» наклон по какой-либо оси, контроллер дает соответствующему двигателю команду чуть-чуть увеличить или уменьшить обороты, чтобы компенсировать наклон. В общем-то и вся логика — за исключением кучи всего (ПИД-регуляторов, теории управления, фильтров Калмана), ничего сложного тут нет (шутка). Ну, а для пользователя все действительно прозрачно. Никаких движущихся частей кроме моторов, в квадрокоптере нет, все управление происходит исключительно изменением вращения оборотов моторов (с поворотами аналогично — изменяем скорости вращения, получаем вращающий момент). А теперь вернемся к истории.
Осторожно, траффик.
MikroKopter
Легендарная немецкая компания, благодаря инженерам которой в 2006 году появился первый аппарат. Контроллер имел на борту процессор Atmega644 c 4Кбайт памяти и частотой до 20МГц, 3 гироскопа по каждой из осей, акселерометр (для возможности горизонтального полета) и барометр для удержания высоты (точность барометра MPX4115A около 1 м). Позже появились дополнительные модули, например GPS для удержания позиции.
Сейчас в youtube можно найти видео, как примерно все это летало (2007 год).
В целом система оказалась весьма удачной. Их продукция никогда не была дешевой, ценник начинался где-то от 1500Евро. Фирма существует и сейчас, они производят профессиональные аппараты, ценовая категория соответствующая. И еще один важный момент — первоначально, создатели Микрокоптер сделали исходный код открытым. Разумеется, уже в скором времени стали появляться различные клоны (в том числе производимые и в РФ), это конечно негативно сказалось на продажах, и код потом закрыли. Но все-таки, думаю это послужило большим толчком к созданию различного вида мультикоптеров.
У нас MikroKopter не был популярен из-за цены, и владельцев было не так уж много. Однако толчок мировому сообществу был дан, и различные системы стали появляться.
KaptainKuk
Одна из самых простых систем, выпускаемых (в различных версиях) с 2010 года и до сих пор. Плата управления имеет только 3 гироскопа, для регулировки параметров используются обычные переменные резисторы.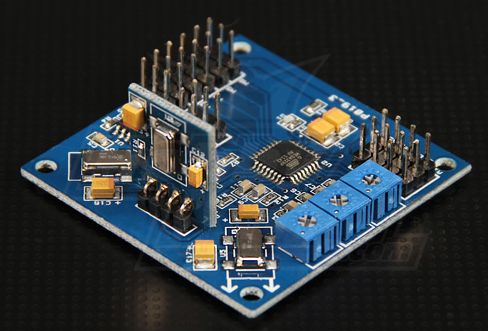
(Фото с сайта Hobbyking.com)
Такая плата сейчас стоит всего около 15$, как можно видеть, на борту кроме гироскопов и слабого процессора, в общем-то ничего и нет. Прошивки в исходных кодах для KK свободно доступны в Интернете, желающие могут скачать их, набрав в поиске гугла имя файла «kk2_1V1.zip» (размер всего 90Кб). Наверное, это первая и последняя версия прошивки какого-либо коптера, написанная на ассемблере.
MultiWii
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano.
Внешний вид платы получался примерно такой (фото с сайта rcgroups, 2010 год): 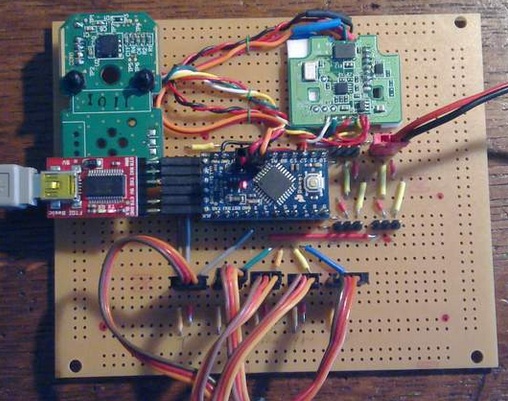
Впрочем, за несколько лет система эволюционировала, и последние платы (они продаются и сейчас, цена вопроса 20–30$) выглядят где-то так: 
(фото с сайта Hobbyking.com)
Последние версии MultiWii имеют вполне неплохие датчики, умеют зависать в точке по GPS, удерживать высоту и возвращаться домой. Т.к. Multiwii был написан для Arduino, все платы так и остались Arduino-совместимыми, исходный код можно скачать на Github. Одним из недостатков MultiWii является слабый процессор, что ограничивает вычислительные возможности алгоритмов, позже стали появляться клоны на STM32, однако погоды они не сделали, т.к. в плане «железа» любой квадрокоптер достаточно прост, 95% сложности заключается именно в коде. В то же время, я уверен что именно исходники MultiWii стали основой всех сегодняшних коммерческих систем.
ArduCopter
Еще одна система, основанная на Arduino, пошла дальше всех. Сейчас это система с возможностью программируемого полета по точкам, поддержкой радиомодемов и передачи телеметрии, хранения различных логов и пр.
Их софт выглядит примерно так: 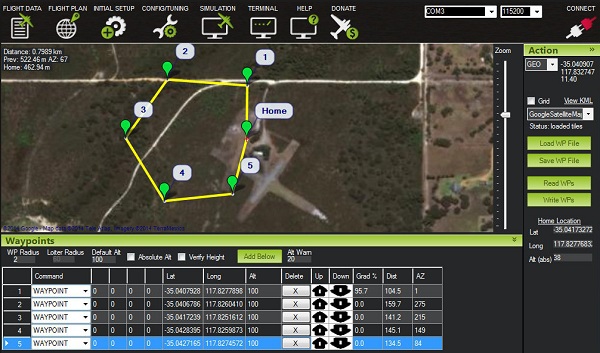
Платы эволюционировали от таких: 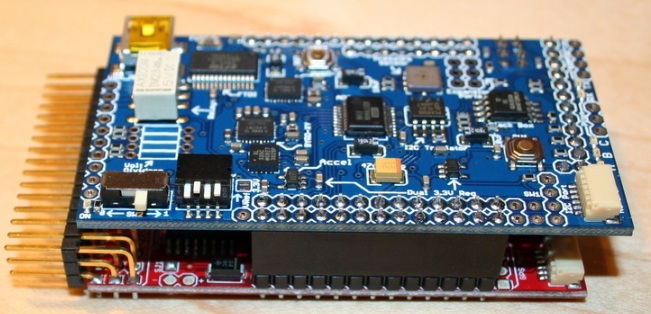
до таких
Платы продаются и сейчас, цена вопроса от 50$ (за клоны) до 250$ за оригинальные версии. Исходные коды Ardupilot так же полностью доступны на github, и судя по количеству коммитов, проект активно развивается. Эта система по возможностям не уступает профессиональным аппаратам, качество полета можно посмотреть на видео:
Здесь все классно, за исключением одного «но» — это Open Source, со всеми вытекающими последствиями. Система открытая, дорабатывается энтузиастами, и никто ничего не гарантирует, в том числе и отсутствия багов в софте. Если квадрокоптер упадет на чей-то BMW, жаловаться будет некому.
Бесколлекторные подвесы (brushless gimbal)
Параллельно с квадрокоптерами, развивалась еще одна очень интересная технология — бесколлекторный подвес для фото/видео камеры. Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям. Их разрабатывал наш соотечественник, как работает подвес, можно видеть на видео (2013й год).
Видно что коптер качается, а ось камеры нет.
Сейчас этим уже никого не удивить, а тогда это был настоящий прорыв в качестве видеосъемки.
Коммерческие системы
Про них писать не так интересно, т.к. принцип здесь простой, «заплати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в бюджетном секторе были популярны аппараты марки Gaui (это был первый бюджетный аппарат ценой около 400$ за готовый коптер). И наконец, самой успешной компанией является DJI, про которую не писал только ленивый, так что повторяться здесь смысла нет. Они вышли на рынок с контроллерами DJI Naza (ценой 200–400$, с возможностью удержания позиции, возврата домой), была отдельная профессиональная серия DJI Wookong (ценой около 1000$ и большей стабильностью полета). Наконец, DJI вышла на рынок устройств готовых к полету (RTF, Ready To Fly), ну про них уже все знают.
И последние видео.
Первый бюджетный квадрокоптер Gaui 330. Цена вопроса 400$, 2010 год, никаких доп.функций.
Dji Naza v2, цена вопроса те же 400$, возможность удержания позиции, возврата домой, полета любой стороной к пилоту (режим carefree).
Dji Phantom 3 — со встроенным подвесом камеры, управлением со смартфона и прочими плюшками.
На этом пока все, sorry за большое количество видео, но без них никак, иначе было бы неинтересно. Посмотрим что будет дальше, лет через 5…
