Как построить гоночный коптер и не устать
Многих интересует тема строительства мультироторных гоночных квадрокоптеров на раме ZMR250, но как только начинаешь исследовать тему, то обнаруживается просто тонна специфической информации, которая может только отпугнуть новичков, но никак не помочь при этом.
В этой статье я хотел бы поделиться тем, что на мой взгляд будет самый правильным и самым простым шагом к тому, чтобы начать летать на этих диких аппаратах.

Это совершенно отдельный класс летающих аппаратов. К их основным особенностям можно отнести:
- Небольшие размеры. Название ZMR250 означает, что у диагональный размер аппарата 250 мм. Вес без аккумулятора и камер обычно не превышает 400 грамм
- Минимальная активная стабилизация
- Нацеленность на агрессивную манеру управления и постоянное движение, а не зависание на месте
- Может нести аппаратуру FPV и пишущую экшн-камеру
- Прочная конструкция, рассчитанная на множественные падения
С инженерной точки зрения он достаточно прост и предоставляет максимум контроля пилоту. Он плохо подходит для того, чтобы ставить рекорды дальности, длительности или высоты полетов. Сделать с него хороший снимок с высоты птичьего полета очень трудно. Зато вы получите массу удовольствия от процесса пилотирования и сможете снимать головокружительные видео!
Готовый набор
По набору конкретного железа у каждого опытного пилота будет свое мнение. Рам, регуляторов оборотов, двигателей, полетных контроллеров, аппаратур радиоуправления, аккумуляторов и т.д. огромное множество и каждый будет советовать вам что-то свое.
Я искренне считаю, что чем разбираться во всех этих мнениях, проще купить готовый набор и вы получите 80% того, что имеют продвинутые пилоты! Размышляя таким образом я залез на aliexpress и приобрел самый дешевый набор комплектующих, который смог найти.
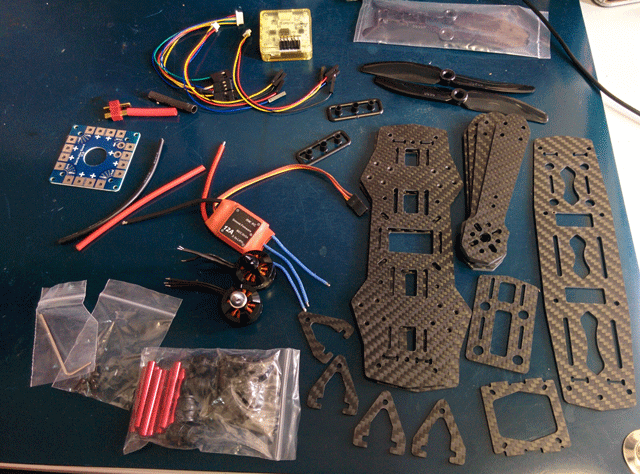
По существу, в нем есть все, что нужно для строительства за исключением аккумуляторов и аппаратуры радиоуправления. То есть за эти деньги вы получаете раму, набор регуляторов двигателей, сами двигатели, полетный контроллер и еще некоторые мелочи.
Итого $70.
Аккумуляторное хозяйство
Для коптера потребуются LiPo-аккмуляторы. Двигатели из моего набора потребляют не очень много и я решил летать на тех, которые у меня уже были — 2200mAh, 3S, 20–30C. Если у вас уже есть подобные аккумуляторы, то можно не покупать другие. Если у вас нет никаких, то на алиэкспрессе купить их будет трудно, но можно. Я бы рекомендовал приобретать аккумуляторы у проверенных поставщиков. Например, вот такие. Их лучше брать два.
К ним потребуется специализированный зарядник. Самый народный — iMAX B6. Обратите внимание, что он питается не от сети, а от блока питания 12В. Также потребуется недорогой тестер для контроля состояния аккумуляторов.
Итого $54. Еще раз напомню, что аккумуляторы можно будет использовать и для других целей.
Аппаратура радиоуправления
Опять же, если у вас никакой пригодной аппаратуры, то имеет смысл взять набор, в который сразу входит передатчик. Например, вот такой за $109.
Если вы хотите все-таки купить систему РУ отдельно, то самый минимальный вариант, это, наверное FlySky за $44. Мы используем, наверное, самый распространенный пульт Turnigy 9x, который стоит около $70 + доставка.
Винты
Очень короткий, но важный пункт. Они будут ломаться постоянно, почти при каждом краше, которых будет много. Для первых полетов я бы купил просто пять комплектов самый дешевых винтов по $2.2.
Итого
В конечном итоге, если у вас до этого ничего не было, самый минимум вложений, это около $175. Я уверен, что это отличный старт для начала освоения тематики гоночных коптеров в целом.
В этом нет ничего сложного и даже человек с минимальными навыками пайки сможет справиться.
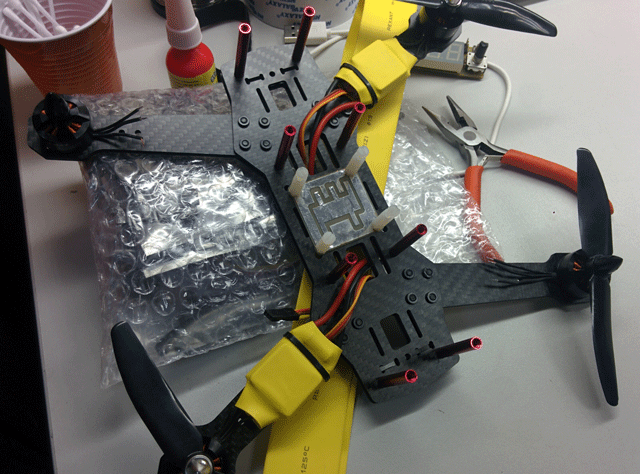
На первом этапе собирается рама, устанавливаются двигатели и регуляторы оборотов. Вот так в итоге должно получиться:

Самое главное, что видно на этой фотографии это то, что левый передний и правый задний двигатель должны вращаться по часовой стрелки (они будут обозначены черными гайками зажима винтов). Правый передний и левый задний двигатели должны вращаться против часовой стрелки и у них будет серебристая гайка. У этих гаек, кстати, направление резьбы препятствует их раскручиванию.
Теперь поговорим подробней о подключении двигателей.
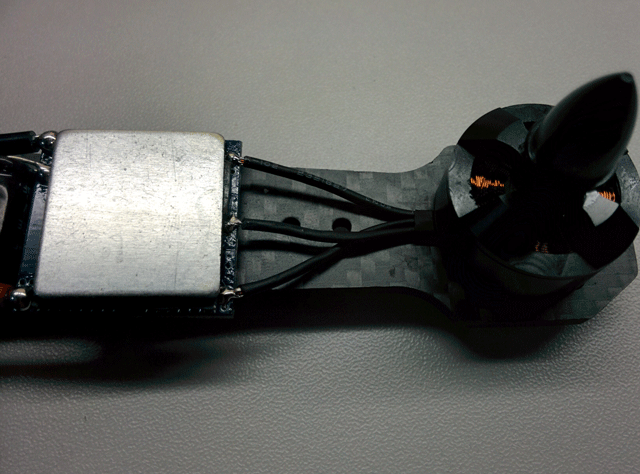
Сделать все это можно по-простому, спаяв провода моторов и регуляторов хода (ESC), но мы решили укоротить их. Для этого сначала снимается термоусадка со всех регуляторов.
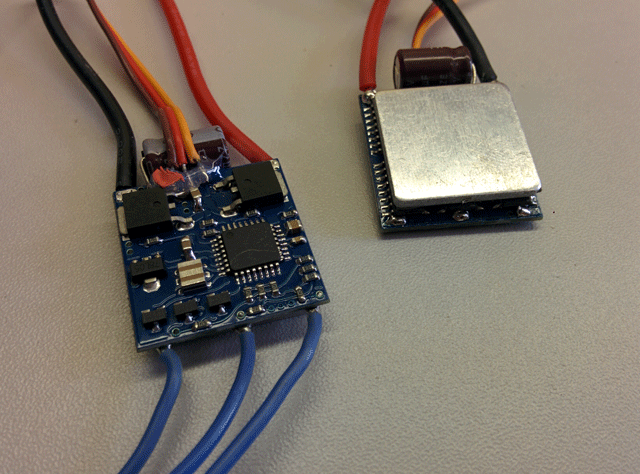
На одной стороне сам контроллер, а на другой стороне ключи с радиатором. Штатные провода мы отпаяли, обрезали провода двигателей на нужную длину и затем запаяли их на плату.
В этот момент необходимо проверить, что подключенный двигатель крутится действительно в правильном направлении. Вот как это сделать:
- Снимите с двигателя винт, если он был установлен!
- Рама проводит ток, поэтому обеспечьте изоляцию ESC от рамы
- Подключите регулятор оборотов к каналу газа приемника системы РУ и включите пульт
Опустите стик газа в нижнее положение - Подключите питание ESC, соблюдая полярность
- Добавляйте понемногу газ, пока двигатель не начнет крутиться
- Если двигатель крутится не в ту сторону, то необходимо поменять местами два любых провода двигателя
После того, как работоспособность двигателя проверена, можно надевать на регулятор оборотов термоусадочную трубку.
Обратите внимание, что мы не стали использовать плату распределения питания из комплекта. У нас был в запасах тонкий фольгированный стеклотекстолит, из которого мы вытравили простую коммутационную плату.

На этой плате должны соединяться все плюсовые и минусовые провода регуляторов оборотов с плюсовыми и минусовыми проводами разъема аккумулятора соответственно. Эту плату необходимо изолировать и мы сделали это при помощи обычного лака для ногтей:

Приемник нашей аппаратуры достаточно большой:

Мы решили снять с него корпус, отпаять от него старые провода и припаять провода от двигателя напрямую к плате. На первых шагах проще этого не делать, чтобы не допустить лишних ошибок. Теперь мы готовы установить полетный контроллер и подключить к нему регуляторы оборотов с приемниками. При его установке обратите внимание внимание на стрелочку, указывающую напрвление «вперед».

Порядок подключения каналов к приемнику не имеет значения, это можно (и нужно) будет указать позже, при настройке. Важно только правильно подключить питание приемника. В комплекте с полетным контроллеров прилагается кабель с разъемом для приемника. В этом кабеле первый провод должен быть черным и его следует подключить к минусу питания приемника. Второй кабель красный и его надо подключить с плюсу питания приемника. Остальные провода просто подключите по порядку ко всем каналам приемника (минимум к первым четырем).
Перед подключением регуляторов необходимо сделать еще одно. В эти регуляторы встроены стабилизаторы для питания полетного контроллера и не нужно подключать все их сразу. Надо выбрать один и оставить его разъем подключения к контроллеру без изменения, а на всех остальных извлечь средний провод и изолировать его. Посмотрите как это сделано на фото выше.
Регуляторы оборотов подключаются очень просто. Левый передний к первому каналу (самый левый разъем на фото), а дальше по часовой стрелке: правый передний ко второму, правый задний к третьему и левый задний к четвертому.
Теперь все необходимые элементы собраны воедино:

Осталось только надеть верхнюю крышку. Мы сразу распечатали держатель камеры для нашей SJ4000. Силиконовые демпферы обязательно надо дублировать хомутами, иначе камера слетит с коптера при падении.

Для настройки CC3D используется программа Libre Pilot (скачать). Вообще, настройка по-настоящему сложный и длительный процесс, на который в перспективе уйдет очень много времени и это будет продолжаться вместе с ростом ваших навыков.
С другой стороны, на начальном этапе, когда у вас нет никаких навыков, достаточно пройти по шагам Setup Wizard’а и уже можно будет летать! Я не буду приводить здесь целиком комикс с окнами, но если есть желание вы можете найти здесь.
Должен сказать, что летать на нем очень сложно и потребуется много часов тренировок. Время полета очень маленькое, удержать на месте очень сложно, но это ничуть не портит ощущения от управления! Даже такой недорогой коптер получается очень быстрым и резким. Кроме того, его гораздо проще взять с собой, например, на природу.
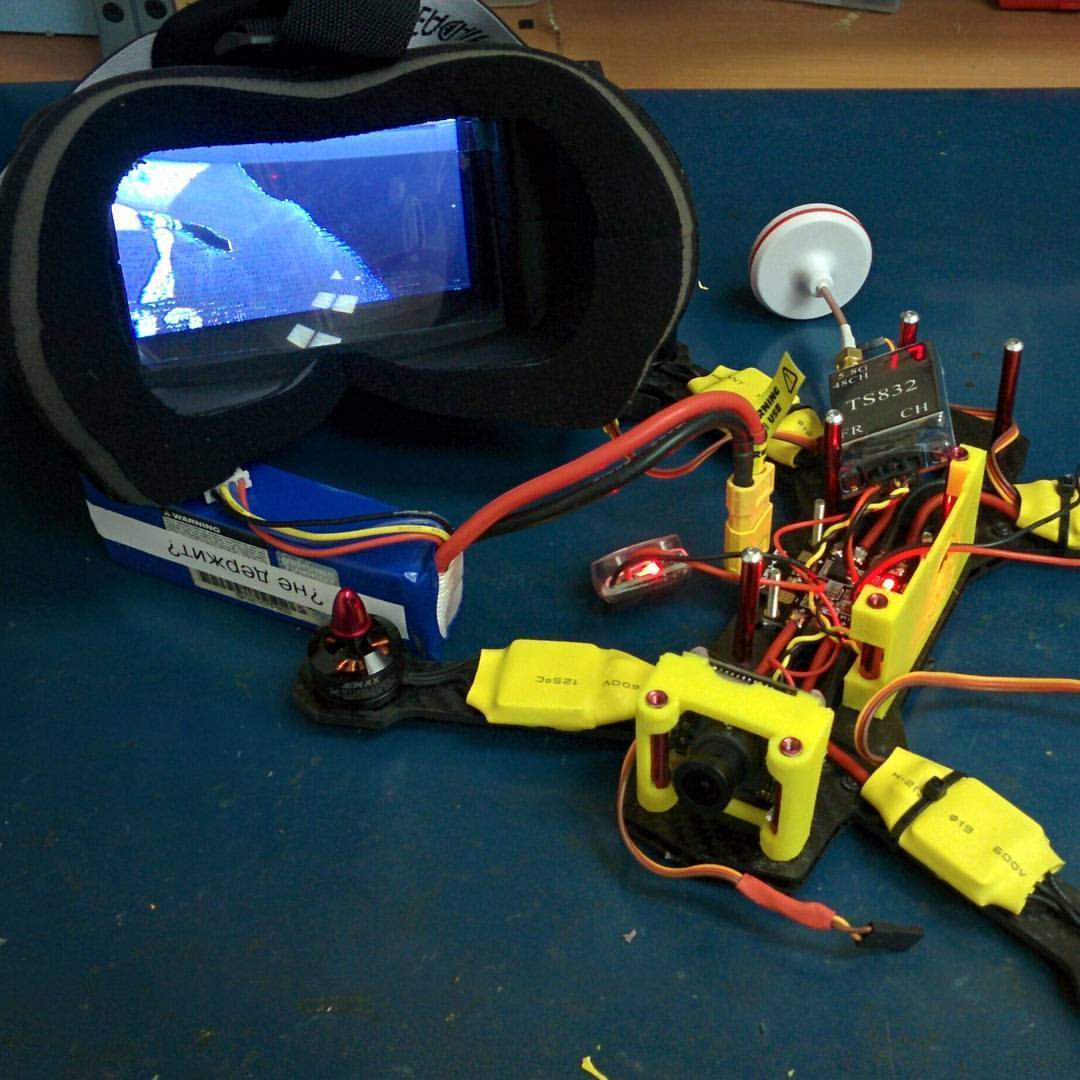
Должен признаться, что после нескольких первых полетов становится понятно, что лучше всего он подходит для полетов от первого лица. Система FPV позволит не ограничиваться зоной видимости и сильно добавит остроты вашим полетам. Но удовольствие это дорогое.
От нее требуется передача на приличное расстояние с минимальными задержками. При этом разрешение не так важно, ведь коптер легко сможет нести еще и основную пишущую камеру. Состоит такая система из камеры, OSD (модуль, подмешивающий телеметрию в видеосигнал), передатчика, приемника и монитора. Какие из этих блоков могут быть, конечно, совмещены. Я купил комплект, который обошелся мне примерно в $100. Но я думаю, что не стоит на первом же этапе сразу покупать FPV-систему.
Коптеры такого класса это вообще очень увлекательное занятие, как с точки зрения полетов, так и с точки зрения строительства. Постоянно приходится решать небольшие несложные задачи, связанные с подбором комплектующих, снижением веса, настройкой и т.д. Отличный способ коротать долгие домашние вечера и прекрасный повод выбираться на природу!
P.S.: насколько я знаю, в моем городе Екатеринбурге подобный аппарат есть только у меня и у еще одного человека. Мне было бы очень интересно найти единомышленников для совместных полетушек!)
