Как летает космическая ракета (на примере РН Союз)?
Добрый день, дорогие Хабровчане!
Давно хотел разобраться и понять, хотя бы примерно, на качественном уровне, что есть траектория космической ракеты? Какую траекторию закладывают для того, чтобы точно попасть в заданную орбиту? Какая должна быть траектория для оптимального использования энергетического ресурса ракеты-носителя? Из этого, как быстро нужно наклонять ракету в процессе полёта? В этой статье поделюсь с Вами своими соображениями и вычислениями. За основу я взял видео с официального Ютуб-канала Роскосмоса с временной линейкой параметров полёта: https://www.youtube.com/watch? v=UNlglX8IiFo. С этими параметрами и буду сравнивать свои вычисления. Параметры ракеты-носителя взяты с Википедии, со страницы с описанием для РН Союз-2 (несмотря на то что на видео представлен запуск РН Союз-ФГ, энергетические и тяговые параметры у них одинаковые)
Заранее оговорю, что сопротивление воздуха в расчётах учтено не будет. За физическую модель космической ракеты принимается материальная точка, то есть физические размеры ракеты в расчётах не участвуют. Форма планеты Земля принимается за шар, место старта — точка на поверхности этого шара. Прямоугольная система координат привязана к плоскости, касательной шару в точке запуска с началом координат в точке запуска (далее — плоскость запуска). Также принимается, что траектория полёта есть плоская кривая, поэтому для расчётов будут использованы только две координаты: горизонтальная координата X — дальность, вертикальная координата Y — высота полёта относительно плоскости запуска. Запуск космического объекта производится на НОО — низкую околоземную орбиту, в данном случае это примерно 200 км над поверхностью Земли, поэтому параметр g — ускорение свободного падения принимается величиной постоянной, равной значению на поверхности Земли: 9,8 м/с^2. Также будем считать для упрощения расчётов, что вектор силы тяжести направлен вертикально вниз на всём промежутке траектории полёта (хотя он разумеется несколько поворачивается вследствие движения ракеты по окружности относительно центра Земли). Расход топлива принимается постоянным для каждой ступени. Чего нельзя сказать для тяги двигателей первой и второй ступеней на начальном участке полёта (до отделения первой ступени). Тяга двигателей существенно зависит от давления внешней атмосферы: чем оно меньше, тем больше тяга. Об этом нам говорит разница в тяге конкретного двигателя на уровне моря и в вакууме, например: РД-107А — двигатель первой ступени, тяга на уровне моря — 85,6 ТС, тяга в вакууме — 104 ТС. Точка запуска принимается за уровень моря, на высоте отделения первой ступени считается вакуум. Я не нашёл нигде информацию о том, как зависит тяга двигателя от внешнего давления атмосферы, а соответственно и от высоты, поэтому в расчётах будет использована линейная зависимость. Процесс полёта будет разделён на три этапа, по числу ступеней ракеты. Расчёт будет произведён для каждого этапа полёта отдельно и затем суммирован в единую траекторию. Первый этап — с момента старта до отделения первой ступени, второй этап — с момента отделения первой ступени до момента отделения второй ступени, третий этап — с момента отделения второй ступени до момента отделения третьей ступени. В процессе полёта ракета поворачивается (наклоняется), или, как говорят, ложится в горизонт. Угол наклона управляется программным автоматом или бортовым компьютером. Закон изменения этого угла мне тоже найти не удалось, поэтому также буду менять его линейно, но с разной скоростью для разных этапов полёта ракеты. Угол наклона будем считать от вертикали, то есть вертикальному положению ракеты будет соответствовать 0 градусов, горизонтальному — 90 градусов. За основу расчётов будет использована динамика свободной материальной точки и будет решаться вторая задача динамики, то есть, по известным массе точки и силам, действующим на неё, будут вычислены законы её движения. Основное уравнение динамики:

где  — масса точки,
— масса точки,  — вектор ускорения,
— вектор ускорения,  — векторы приложенных к точке сил. С учётом действующих на ракету сил уравнение примет вид:
— векторы приложенных к точке сил. С учётом действующих на ракету сил уравнение примет вид:

где  — суммарная тяга двигателей,
— суммарная тяга двигателей,  — сила тяжести. Ускорение свободного падения принято постоянным, равным
— сила тяжести. Ускорение свободного падения принято постоянным, равным  у поверхности Земли, тогда
у поверхности Земли, тогда

И уравнение примет вид:

Разделим обе части уравнения на m:

Космическая ракета — это тело переменной массы, топливо сгорает, масса ракеты уменьшается. Будем называть расход топлива расходом массы. Поэтому  в знаменателе первого слагаемого правой части будет представляться некоторой линейной (так как расход топлива принят постоянным) функцией зависимости массы от времени
в знаменателе первого слагаемого правой части будет представляться некоторой линейной (так как расход топлива принят постоянным) функцией зависимости массы от времени  . Обозначим начальную массу ракеты
. Обозначим начальную массу ракеты  , массу ракеты после выработки топлива
, массу ракеты после выработки топлива  . Тогда
. Тогда  есть масса топлива. Обозначим время работы двигателей
есть масса топлива. Обозначим время работы двигателей  . Тогда
. Тогда

есть расход массы в единицу времени и уравнение расхода массы примет вид:

Подставим это уравнение в уравнение динамики:

Как было сказано выше, тяга двигателя зависит от внешнего давления, это актуально для двигателей первой и второй ступеней до отделения первой ступени, пока ракета летит в плотных слоях атмосферы. Поэтому числитель первого слагаемого правой части уравнения тоже должен быть представлен в виде линейной функции (выше оговаривалось, что за неимением реального закона изменения тяги в зависимости от давления будет использована линейная зависимость).  — тяга на старте,
— тяга на старте,  — тяга в вакууме, T — время работы двигателей до отделения первой ступени. Тогда коэффициент возрастания тяги будет
— тяга в вакууме, T — время работы двигателей до отделения первой ступени. Тогда коэффициент возрастания тяги будет

Уравнение тяги

Для каждого этапа полёта это уравнение будет считаться отдельно.  — суммарная тяга двигателей первой и второй ступеней на старте,
— суммарная тяга двигателей первой и второй ступеней на старте,  — стартовая масса ракеты,
— стартовая масса ракеты,  — тяга двигателя второй ступени,
— тяга двигателя второй ступени,  — масса ракеты в момент после отделения первой ступени,
— масса ракеты в момент после отделения первой ступени,  — тяга двигателя третьей ступени,
— тяга двигателя третьей ступени,  — масса ракеты в момент после отделения второй ступени. Теперь распишем эти уравнения по осям координат, заранее задав линейный закон изменения угла наклона ракеты.
— масса ракеты в момент после отделения второй ступени. Теперь распишем эти уравнения по осям координат, заранее задав линейный закон изменения угла наклона ракеты.

Для первого этапа полёта:


Для второго и третьего этапов полёта:




Теперь заменим в этих уравнениях все ускорения на вторую производную от перемещения:






Мы получили шесть дифференциальных уравнений, которые будем решать численным методом с начальными условиями с помощью программы. Начальные условия для первых двух уравнений принимаются нулевыми (начальные координаты и скорость равны 0). Начальные условия для остальных уравнений берутся из конечных значений решений предыдущих уравнений соответственно.
Распишем подробно параметры ракеты.
Первая ступень (один боковой блок из четырёх)
Стартовая масса: 44 413 кг
Сухая масса: 3784 кг
Тяга: 85,6 тс / 104 тс
Время работы: 118 с
Вторая ступень:
Стартовая масса: 99 765 кг
Сухая масса: 6545 кг
Тяга: 80,8 тс / 94 тс
Время работы: 300 с
Третья ступень:
Стартовая масса: 27 755 кг
Сухая масса: 2355 кг
Тяга: 30,38 тс
Время работы: 224 с (на видео третья ступень отключается на 524-й секунде полёта, 524 — 300 = 224)
Масса на старте: M1 = 313 т Тяга на старте: 423,2 тс
Расход массы первой ступени: (44413 — 3784)/118 = 344,3 кг/с * 4 = 1377,3 кг/с
Расход массы второй ступени: k2 = (99765 — 6545)/300 = 310,7 кг/с
Суммарный расход массы до отделения первой ступени: k1 = 1377,3 + 310,7 = 1688 кг/с
Масса после отделения первой ступени: M2 = 96752 кг
Масса после отделения второй ступени: M3 = 30693 кг
Расход массы третьей ступени: k3 = (27755 — 2355)/300 = 84,7 кг/с
Вычисление
Программа расчёта траектории написана на языке Java. Для визуализации траектории на плоскости использована библиотека awt. Решение дифференциальных уравнений произведено с помощью уточнённого метода Эйлера, подробное описание можно найти, например, в книге В.М. Вержбицкий «Численные методы». Код программы расчёта доступен по ссылке:
https://github.com/eduprojectgithub/rocketrepository.git
Для того чтобы отобразить траекторию полёта относительно плоскости к траектории применена поправка кривизны (кривизна Земли линеаризована).
Результаты вычислений
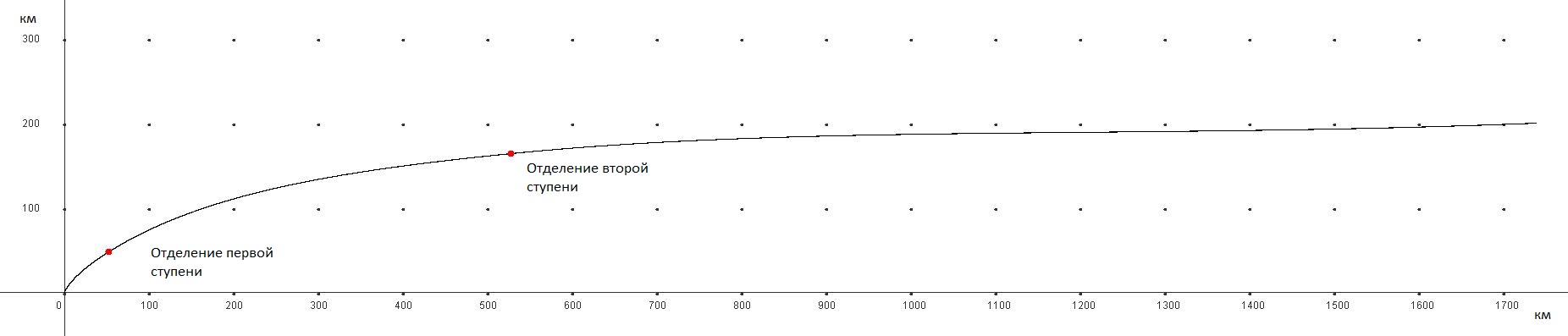
Траектория с поправкой кривизны:
Траектория без поправки кривизны:

Сравнение результатов
В момент перед отстыковкой первой ступени
|
|---|
В момент перед отстыковкой второй ступени
|
|---|
В момент перед отстыковкой третьей ступени
|
|---|
Вероятно, зная точные топливо-заправочные характеристики ракеты-носителя перед стартом, можно более точно посчитать параметры траектории.
Вообще, параметры конечной орбиты, на которую выводится космический корабль (параметры эллипса, в общем случае) сильно зависят от от конечной скорости, которую мы получаем в конце работы третьей ступени. Дадим чуть больше скорости — получим вытянутую орбиту, дадим чуть меньше — прилетим обратно.
