Как Яндекс создал глобальный прогноз осадков с точностью до минут. Взгляд из космоса
У команды Яндекс.Погоды есть традиция рассказывать о новых технологиях на Хабре. Мы уже рассказывали, как методы машинного обучения позволили создать более точный прогноз погоды, а также о том, как нейросети и данные с радаров помогают прогнозировать осадки.
Сегодня мы расскажем читателям Хабра о новой технологии, с помощью которое нам удалось добиться прогнозирования осадков с точностью до минут даже там, где данных с радаров просто нет. И помогли нам в этом снимки со спутников.
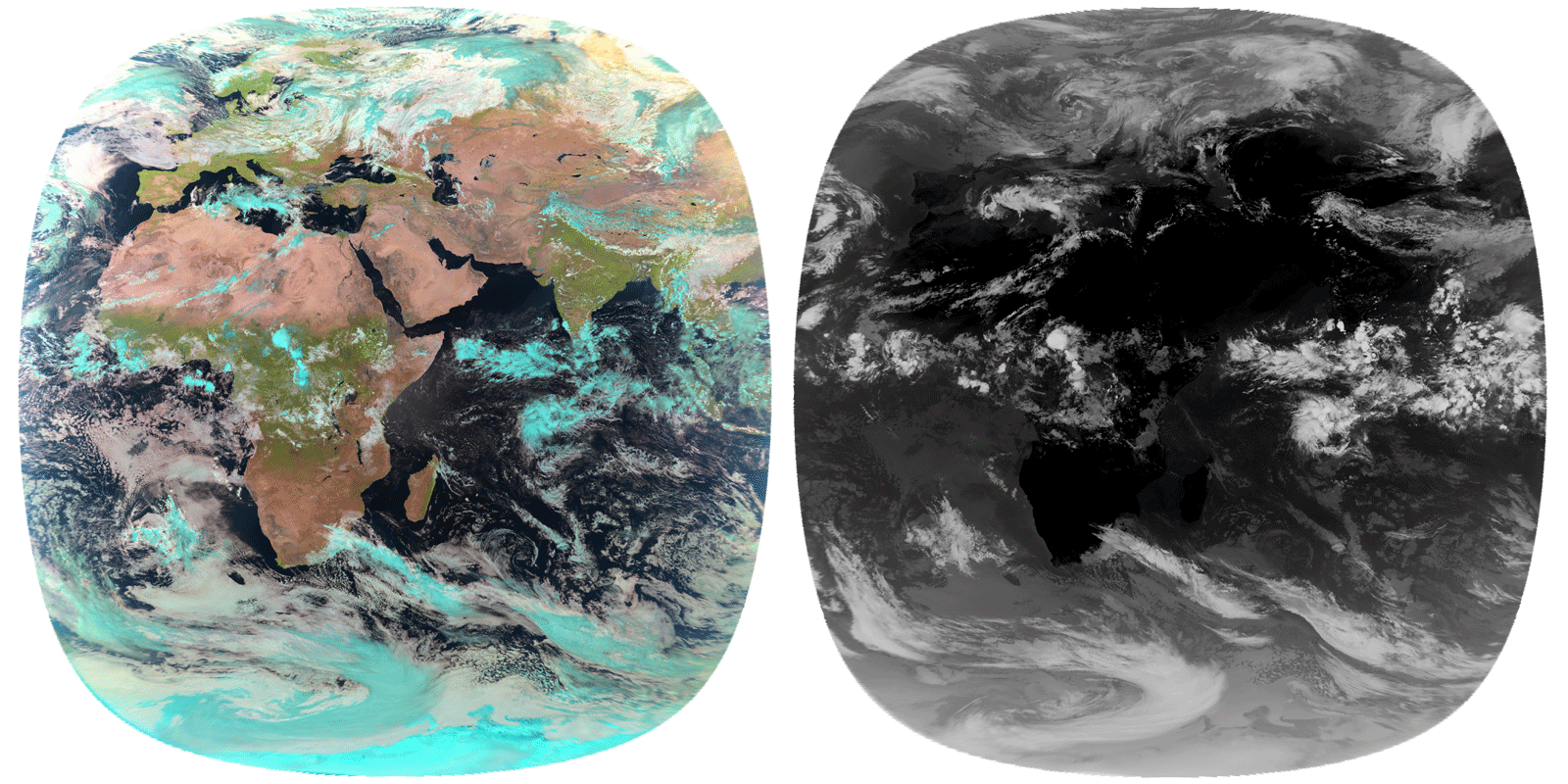
Снимки спутника Meteosat-8 из космоса (источник: EUMETSAT)
Про радары и наукаст
Жителям центральной части России несказанно повезло, потому что именно здесь установлены метеорологические радары Росгидромета — современные инструменты, которые позволяют получать карту осадков в радиусе 250 километров от точки установки радара. При этом пространственное разрешение этой карты составляет 2×2 километра на пиксель, а интервал между двумя последовательными снимками — всего 10 минут.
 Слева показано, как выглядит метеорадар (источник: ЛЭМЗ)
Слева показано, как выглядит метеорадар (источник: ЛЭМЗ)
Что это означает для обычного человека, которому интересна погода? На территориях, покрытых радарным зонтиком, можно сообщать об осадках с точностью до жилого квартала. Такие данные сильно уточняют традиционный прогноз погоды, потому что несут информацию о том, что произошло буквально несколько десятков минут назад. Более подробно про преимущества радаров написано в нашей предыдущей статье. Теперь рассмотрим их недостатки.
Основной из них — плохая масштабируемость, связанная с огромной стоимостью такого средства измерения и сложностью конструкции. Напомним, что сейчас радарами покрыта только часть европейской территории России, а также Барабинск и Владивосток. Кроме того, радарные наблюдения страдают от построек вокруг — например, высокие здания могут загораживать обзор в целых секторах, что сказывается на качестве получаемых полей осадков по радарным снимкам. Пример того, как могут выглядеть усредненные за несколько месяцев наблюдения по каждому из доступных нам радаров указан на иллюстрации ниже.
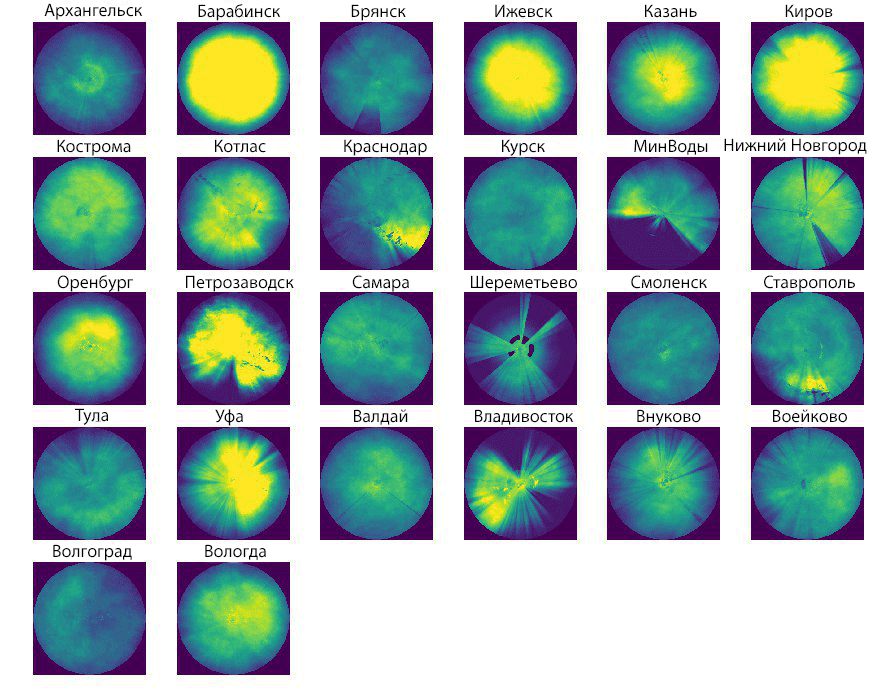
Усредненные данные по измерениям радаров за несколько месяцев
Как видно, сильно страдает качество у радаров, установленных в Шереметьево и Владивостоке, а в Минеральных водах выпадает целый сектор.
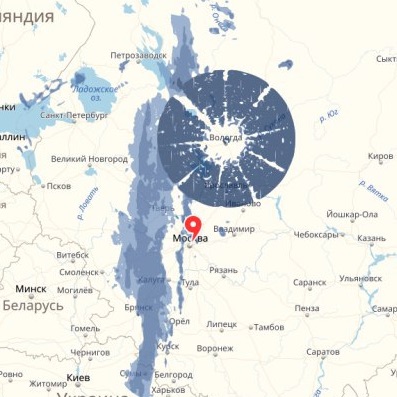 Мы это видим на жалобах от наших пользователей. Также, в случае низких осадков, радар может не видеть на все 250 километров из-за кривизны поверхности Земли, что сказывается на возможности определения осадков ближе к границе видимости. Помимо этого, радары выходят из строя, иногда надолго, из-за чего страдают наши пользователи, которые привыкли к карте осадков и предупреждениям о дожде. Из-за этого, к примеру, возникают неожиданные «взрывы» в поле осадков, как это было недавно в Вологде. Что, конечно же, становится поводом для шквала всевозможных мемов.
Мы это видим на жалобах от наших пользователей. Также, в случае низких осадков, радар может не видеть на все 250 километров из-за кривизны поверхности Земли, что сказывается на возможности определения осадков ближе к границе видимости. Помимо этого, радары выходят из строя, иногда надолго, из-за чего страдают наши пользователи, которые привыкли к карте осадков и предупреждениям о дожде. Из-за этого, к примеру, возникают неожиданные «взрывы» в поле осадков, как это было недавно в Вологде. Что, конечно же, становится поводом для шквала всевозможных мемов.
Спутники как источник информации
Чтобы не быть привязанными к радарам, мы решили в буквальном смысле сделать космический продукт, о чем намекает заглавная картинка. Кроме радарных измерений существуют похожие подходы по оценке осадков на основе спутниковых снимков. Существует группировка специальных метеорологических спутников (на орбите находятся около 30 аппаратов): как полярно-орбитальных, которые покрывают Землю снимками подобно тому, как нить наматывается на клубок, так и геостационарные — спутники находятся на высоте около 36000 километров от поверхности Земли и вращаются синхронно с вращением Земли над экватором. Особенность орбиты спутников второго типа позволяет постоянно «висеть» над одной и той же точкой и получать такие же снимки, как и в начале статьи. Спутниковая группировка геостационаров позволяет покрыть наблюдениями практически всю Землю, используя для этих целей европейские спутники (Meteosat), американские (GOES) и японские (Himawari). Продукты на их основе имеют пространственное разрешение от 0.5 до 3 километров на пиксель, но есть проблема. Спутники висят над экватором, поэтому наши широты попадают на самый край снимка, из-за чего данные страдают от геометрических искажений.
Прогноз на спутниковых снимках
Идея использовать спутниковые снимки для прогноза погоды не нова — информация с них используется в традиционных глобальных моделях прогноза погоды. Кроме того, из спутниковых снимков извлекают полезную информацию: от мониторинга вулканического пепла и лесных пожаров до поиска фитопланктона. Конечно же, спутниковые снимки используют и для мониторинга осадков и их краткосрочного прогнозирования. Например, есть стандартные алгоритмы по обнаружению областей с осадками — SAFNWC, но они хорошо работают только для случая с конвективными осадками. По нашим строгим метрикам, которые мы используем для радарного наукаста, такие алгоритмы, увы, оказываются в аутсайдерах. Мы же хотели сделать продукт по качеству сравнимый с текущим решением на радарных данных, но при этом еще и масштабируемый глобально. Для этого мы взяли сильные стороны от каждого из подходов и применили магию машинного обучения.
Meteosat как источник информации
После первых экспериментов на стандартных алгоритмах мы решили, что спутниковому наукасту в Погоде быть. Но тут возникла первая проблема: где брать спутниковые снимки? В век цифровых технологий, казалось бы, не должно быть проблем с получение спутниковой информации. В интернете можно найти всё…  кроме того, что тебе нужно. Со спутниками ситуация складывается следующим образом: чтобы оперативно получать снимки из космоса, необходимо установить приемную станцию. Стандартный набор включает в себя спутниковую тарелку, DVB-S тюнер и компьютер, на котором снимки сохраняются и обрабатываются. Да, технология полностью аналогична спутниковому телевидению, только тарелка чуть больше человеческого роста, а тюнер чуть-чуть подороже.
кроме того, что тебе нужно. Со спутниками ситуация складывается следующим образом: чтобы оперативно получать снимки из космоса, необходимо установить приемную станцию. Стандартный набор включает в себя спутниковую тарелку, DVB-S тюнер и компьютер, на котором снимки сохраняются и обрабатываются. Да, технология полностью аналогична спутниковому телевидению, только тарелка чуть больше человеческого роста, а тюнер чуть-чуть подороже.
Таким образом, в нашем новом ДЦ во Владимире у нас появилась собственная станция приема спутниковой информации. Данные на нее приходят с европейских спутников серии Meteosat второго поколения. Чтобы покрыть западную часть территории России, мы выбрали спутник Meteosat-8, который висит над Индийским океаном на долготе 41.5°. 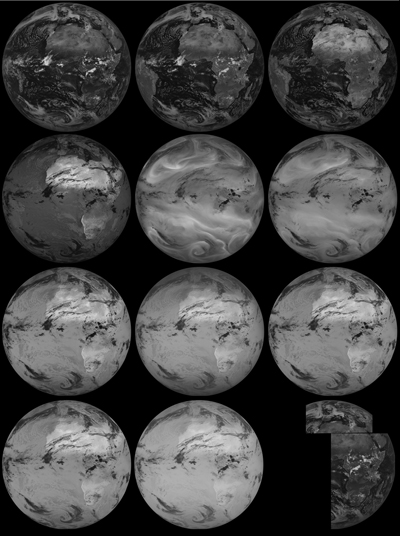 Снимки делаются каждые 15 минут — в течение них проходит полное сканирование видимой области спутника, после чего сканирование начинается заново. Из-за этого снимки отстают на 15 минут от реального времени. Съемка проходит в 12 каналах: 11 каналов в видимом и инфракрасном диапазонах с разрешением 3×3 километра, а также 1 канал в видимом спектре с разрешением 1×1 километр (пример съемки в разных каналах показан справа, источник: EUMETSAT). Полный снимок имеет разрешение 3712×3712 пикселей или примерно 14 мегапикселей, как у камеры современного смартфона.
Снимки делаются каждые 15 минут — в течение них проходит полное сканирование видимой области спутника, после чего сканирование начинается заново. Из-за этого снимки отстают на 15 минут от реального времени. Съемка проходит в 12 каналах: 11 каналов в видимом и инфракрасном диапазонах с разрешением 3×3 километра, а также 1 канал в видимом спектре с разрешением 1×1 километр (пример съемки в разных каналах показан справа, источник: EUMETSAT). Полный снимок имеет разрешение 3712×3712 пикселей или примерно 14 мегапикселей, как у камеры современного смартфона.
Снимок разбит на 8 частей (полосами по широтам), что иногда сказывается на качестве данных — потеря одной части может сделать бесполезным весь снимок.
Детекция осадков
Так как наши первые эксперименты показали, что качество продукта при использовании традиционных подходов страдает, мы решили использовать то, что принесло нам успех в случае с обычным наукастом. На помощь пришли нейросети. В качестве входных параметров мы использовали информацию из 11 каналов спутниковой съемки, а обучались на радарных снимках, сведенных в единое поле на сетке 2×2 километра. Мы использовали традиционные подходы, которыми решаются подобные задачи в компьютерном зрении. До последнего момента соревновались две архитектуры, основанные на ResNet-подобных (за авторством irina-rud) и U-Net-подобных (за авторством illusionww) моделях.
ResNet используется в задачах классификации изображений и может быть очень глубоким, при этом увеличение количества слоев дает стабильный прирост в качестве. Однако такая архитектура имеет недостатки при использовании — мы вынуждены применять обученную модель в каждой точке нашей географической сетки. В качестве альтернативы была выбрана U-net — архитектура свёрточной нейронной сети, которая обычно используется в задачах сегментации изображений. Первоначально она разработана в биомедицинских целях для быстрой работы с большими изображениями. С такой архитектурой быстрее проверять наши гипотезы, кроме того, мы можем применять обученную модель не поточено, что заметно сказывается на скорости обработки спутниковых снимков. Ниже представлено сравнение по полученным метрикам для двух архитектур. Так как нам удалось приблизить U-net модель по качеству к ResNet, но при этом U-net позволяет быстрее обрабатывать спутниковые снимки, то её мы и использовали в качестве production решения.

На этом графике показана F1 мера — стандартная метрика в задачах классификации, которая показывает, насколько наши спутниковые осадки отличаются от радарных. При идеальном совпадении она должна равняться единице. Как видно из графика, качество детекции осадков зависит от времени суток, так как снимок в видимом диапазоне является важным источником информации.
Задача осложняется еще и тем, что нужно не только выделить облако на снимке, но и определить, пойдет ли из него дождь. В ходе экспериментов мы выявили, что информации из 11 каналов недостаточно. Чтобы сделать качественный продукт, важно учитывать такие параметры, как угол солнца над горизонтом, высоту рельефа, данные на ближайшие часы из метеорологической модели, например о влагозапасе облаков, влажности в атмосфере на различных уровнях и т.п. В результате обученная модель позволяет выделять осадки с большой точностью. Так на рисунке показано наложение осадков по спутникам и радарному полю. Здесь фиолетовый цвет — спутники за пределами радаров, малиновый цвет — пересечение радаров и спутников, синий — то, что обнаруживают спутники, но не обнаруживают радары, а красный — то, что обнаружили только радары. На рисунке заметен небольшой систематических сдвиг на север, связанный с тем, что мы детектируем дождь не снизу облаков, как это делают радары, а сверху, из космоса и под углом. Эта проблема будет устранена в ближайшем релизе, что скажется на росте точности.
В результате обученная модель позволяет выделять осадки с большой точностью. Так на рисунке показано наложение осадков по спутникам и радарному полю. Здесь фиолетовый цвет — спутники за пределами радаров, малиновый цвет — пересечение радаров и спутников, синий — то, что обнаруживают спутники, но не обнаруживают радары, а красный — то, что обнаружили только радары. На рисунке заметен небольшой систематических сдвиг на север, связанный с тем, что мы детектируем дождь не снизу облаков, как это делают радары, а сверху, из космоса и под углом. Эта проблема будет устранена в ближайшем релизе, что скажется на росте точности.
Спутниковый наукаст
Так как технология достаточно новая, мы решили не отказываться от радаров, а оставить их в тех местах, где наши пользователи уже привыкли пользоваться наукастом. Здесь возникает проблема: как показывать продукты, отличающиеся по методу измерения, в одном интерфейсе. Мы решились на смелый эксперимент — показывать радары и спутники в едином, привычном для пользователя интерфейсе радарного наукаста, расширив область с помощью спутников. Для этого была проделана огромная работа, так как нам надо, во-первых, согласовать спутники и радары по времени, а, во-вторых, правильно склеивать их на границе видимости радаров.
Чтобы привести 15-минутные спутниковые снимки к 10-минутным интервалам, уже привычным нашим пользователям, мы используем Optical Flow для создания промежуточных кадров между последовательными спутниковыми снимками. Optical flow или оптический поток — это технология, которая используется в компьютерном зрении для определения сдвигов между изображениями. Используя два снимка, мы можем построить поле векторов смещения изображения в каждой точке — такое, которое позволяет получить из предыдущего снимка следующий. С помощью векторов переноса мы можем получить и промежуточные кадры, чтобы привести их к единой шкале по времени с 10-минутными интервалами. Этот же алгоритм (стараниями bonext и ruguevara) пока что используется и для прогноза на 2 часа вперед с 10-минутным разрешением для спутниковых снимков, а радары обсчитываются старым проверенным алгоритмом на основе нейронных сетей, описанным в нашей статье про радарный наукаст. В следующем обновлении мы планируем полностью перейти на перенос всего поля осадков с использованием нейросетевой архитектуры.
При склейке разнородных данных, конечно же, иногда возникают артефакты, например, как на рисунке слева.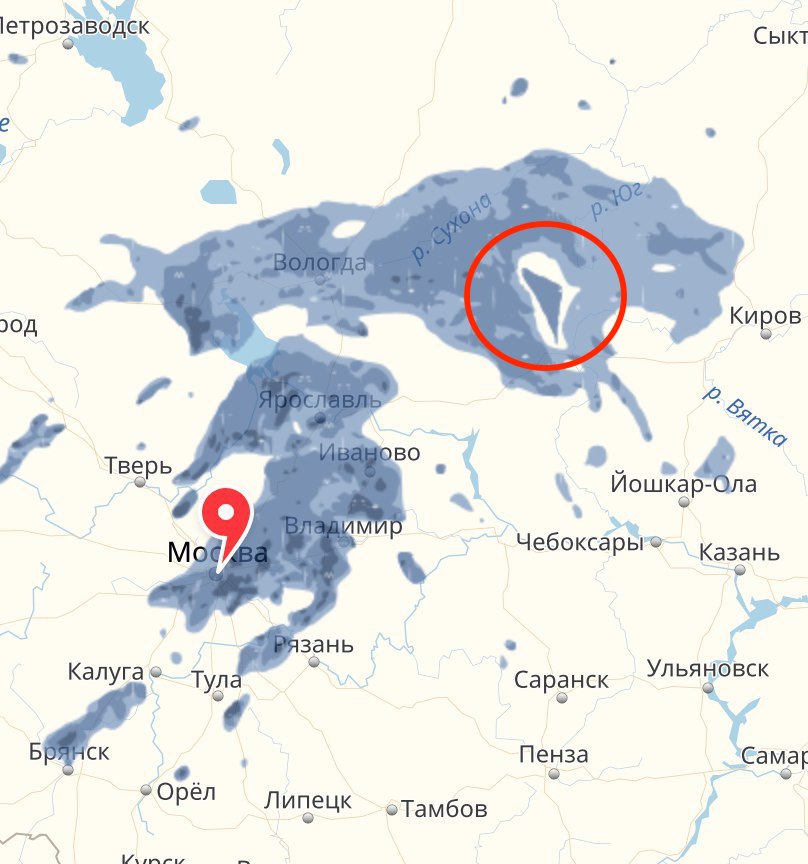 Здесь заметна стандартная для радаров проблема — на границе видимости они не видят осадки, а в треугольник между ними попадает информация от спутника, который успешно детектирует дождь. Думая о решении задачи склеивания двух областей данных разной природы, мы вспомнили о такой задаче, как inpainting. Nvidia в своей недавней статье Image Inpainting for Irregular Holes Using Partial Convolutions показывает, как нейросети умеют восстанавливать детали картинки по нерегулярным маскам. На Yet Another Conference рассказывалось, как Дмитрий Ульянов с помощью inpainting восстанавливал фреску. Этот же подход мы планируем использовать и в нашем случае, и уже есть успешные наработки, которые совсем скоро поедут в production, что позволит правильно учитывать разнородную информация с различных источников о факте дождя.
Здесь заметна стандартная для радаров проблема — на границе видимости они не видят осадки, а в треугольник между ними попадает информация от спутника, который успешно детектирует дождь. Думая о решении задачи склеивания двух областей данных разной природы, мы вспомнили о такой задаче, как inpainting. Nvidia в своей недавней статье Image Inpainting for Irregular Holes Using Partial Convolutions показывает, как нейросети умеют восстанавливать детали картинки по нерегулярным маскам. На Yet Another Conference рассказывалось, как Дмитрий Ульянов с помощью inpainting восстанавливал фреску. Этот же подход мы планируем использовать и в нашем случае, и уже есть успешные наработки, которые совсем скоро поедут в production, что позволит правильно учитывать разнородную информация с различных источников о факте дождя.
А что дальше?
Прямо сейчас на 100% наших пользователей работает наукаст, построенный, как на радарных, так и на спутниковых измерениях (благодаря космической поддержке imalion и работе команд бэкенда и фронта). Надеемся, наши пользователи, которые ждали наукаст у себя в городе, начали им пользоваться и получать своевременную информацию о надвигающихся осадках. На данный момент покрыта зона, ограниченная видимой областью самого спутника на севере и востоке (чуть восточнее реки Обь). На юге мы пока ограничили зону до нижней части Кипра, а на западе — до Швейцарии. Теперь можно смотреть за приближением фронтов еще на подходе к вашему городу и наблюдать за красивыми погодными причудами. А разница в покрытии видна невооруженным глазом.
Таким образом, мы покрыли большую часть России, СНГ и некоторых туристических направлений. Конечно же, мы не забыли и о восточной части нашей страны — уже сейчас мы работаем с японским спутником Himawari, который висит над Австралией и позволит в скором времени порадовать наукастом наши восточные рубежи.
А дальше — глобальная карта осадков на весь мир, избавленная от детских болезней, с повышенной точностью детекции осадков, единым алгоритмом переноса и правильной склейкой всех данных по осадкам.
Оставайтесь с нами, пользуйтесь наукастом, делитесь впечатлениями и отзывами.
