Роботизированная щупальца с множеством степеней свободы
Зачастую, при создании манипуляторов для роботов учитывается не только количество степеней свободы и крепость захвата, но и способность работать с мягкими предметами не повреждая их. Новый пневматический пластиковый манипулятор-щупальце, созданный учеными из Гарвардской школы инжиниринга и прикладных наук (США), не только удовлетворяет этим требованиям, но оказался значительно дешевле и универсальнее существующих аналогов. Кроме того, он настолько деликатный, что способен оперировать таким нежным объектом как цветок без нанесения ему малейших повреждений.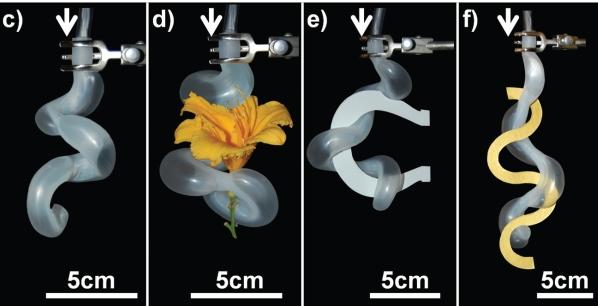
Читать дальше →

