Исследователи разработали прототип робота для сбора шампиньонов
Исследователи из сельскохозяйственного колледжа при университете штата Пенсильвания разработали роботизированный механизм для сборки и подрезки грибов, продемонстрировав его эффективность в автоматической сборке шампиньонов. Результаты испытаний опубликованы в журнале Transactions of the American Society of Agricultural and Biological Engineers.
Прототип, использующий машинное зрение для распознавания объектов, продемонстрировал способность собирать и подрезать грибы, растущие на стеллажах фермы.
По словам руководителя исследования Лонг Хе, адъюнкт-профессора сельского хозяйства и биоинженерных технологий, разработка робота продиктована нехваткой рабочих рук в грибной индустрии и соответствующим ростом стоимости труда.
Хе сказал, что в Пенсильвании выращивают две трети всех грибов в США, и владельцам ферм трудно найти работников для сбора урожая — сложной и тяжёлой работы.

Чтобы определить силу воздействия манипулятора на грибы, исследователи провели динамические исследования процесса сбора грибов при помощи силовых и инерциальных датчиков.
По словам Хе, создать автомат для сбора грибов — задача непростая. Человек, собирающий грибы, ищет спелый экземпляр, затем тянет его одной рукой, обычно тремя пальцами, а ножом в другой руке подрезает ножку. Он может собрать по два-три гриба за один раз, а потом переместить их в корзину. Роботу необходимо действовать сходным образом.
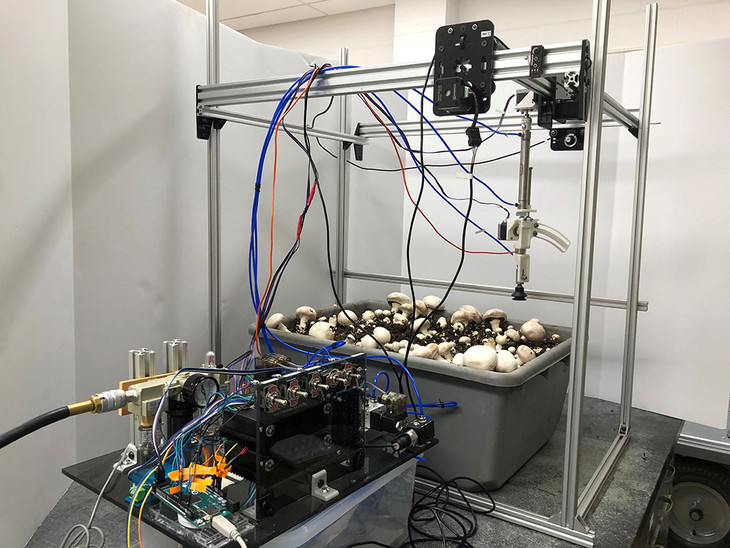
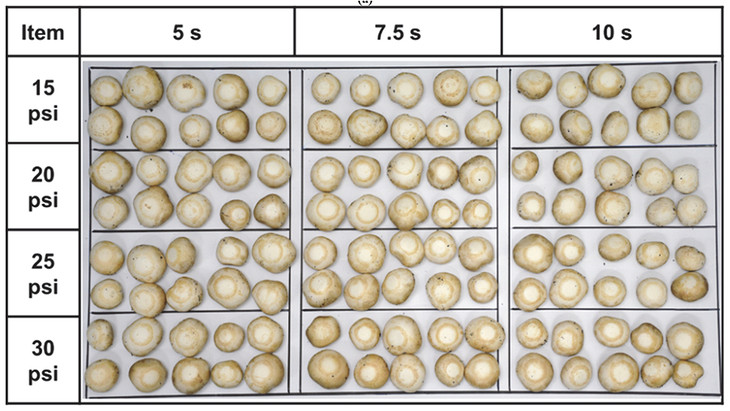
Исследователи собрали манипулятор, оснащённый сгибающимся захватом и триммером, и имеющий четыре степени свободы. Также манипулятор оснастили системой пневматического контроля. Для захвата гриба используется силиконовая присоска, и инженеры провели испытания, чтобы проанализировать влияние давления воздуха и времени захвата на итоговый результат.
В целом система показала хорошую эффективность. Механизм позиционирования успешно отработал в 90% случаев, триммер — в 97% случаев. Всего для испытаний было собрано 70 грибов.
