«Индженьюити» выполнил шестой полет, во время которого чуть не случилась авария
 Вертолет «Индженьюити» на посадочной площадке после выполнения шестого полета, в котором он значительно отдалился от марсохода. Фото с бортовой камеры марсохода.
Вертолет «Индженьюити» на посадочной площадке после выполнения шестого полета, в котором он значительно отдалился от марсохода. Фото с бортовой камеры марсохода.27 мая специалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) сообщили, что марсианский вертолет «Индженьюити» успешно, но с проблемами, выполнил свой шестой полет на дистанцию 215 метров с максимальной высотой 10 метров и скоростью до 4 м/c. Аппарат перебазировался на третье посадочное место, но с ним начались проблемы во время полета — сбоили таймер камеры, система навигации и электропитания. Также он чуть не перевернулся при посадке, отклонения по крену и тангажу перед этой процедурой были более, чем на 20 градусов. 
Фото с бортовой камеры «Индженьюити» во время шестого полета, высота 10 метров.
Полетный план шестой миссии включал в себя: пролет 150 метров по прямой на юго-запад, потом движение на юг на 15 метров, 50 метров на северо-восток и посадку на ранее не изученную, но относительно ровную и без больших камней площадку.
НАСА пояснило, что по логам, первая часть полета прошла штатно, но последние 65 метров вертолет скачкообразно менял скорость и раскачивался. Перед посадкой он пытался скомпенсировать свое положение и затратил больше энергии, чем было рассчитано. После посадки оказалось, что он промахнулся на 5 метров от места запланированного приземления.
Специалисты JPL предположили, что произошла какая-то аномалия во время выполнения шестой миссии. Они выяснили, что через 54 секунды полета на «Индженьюити» произошел сбой таймера навигационной камеры, из-за которого система навигации и позиционирования, включая инерциальный измерительный блок IMU, начала некорректно работать. Бортовой компьютер вертолета пытался исправить возникшие фантомные ошибки, что привело к скачкам энергопотребления, а данные с части датчиков обрабатывались с задержкой. В итоге, вертолет смог приземлиться немного пролетев место посадки, но сел без повреждений. Сейчас его бортовые системы в порядке, а НАСА пытается найти причину инцидента с таймером и исправить ситуацию до проведения седьмого полета.
Бортовая система управления вертолета реагирует на его движения, измеряя ускорение и скорость вращения, и выдает управляющие сигналы со скоростью 500 раз в секунду. Эта система также получает данные с навигационной камеры, которая делает 30 снимков в секунду, ставя на них метку времени.
Когда в систему управления поступают изображения с черно-белой камеры, то алгоритм навигационной системы выполняет ряд действий. Во-первых, он проверяет метку времени, которую получает вместе с изображением, чтобы определить, когда было снято изображение. Затем алгоритм делает прогноз о том, что камера должна была видеть в этот конкретный момент времени, с точки зрения особенностей поверхности, которые она может распознать по предыдущим изображениям, сделанным за несколько минут до этого (обычно из-за цветовых вариаций и выступов, таких как камни и рябь на песке). Наконец, алгоритм проверяет, где на самом деле эти элементы появляются на изображении. Алгоритм навигации использует разницу между прогнозируемым и фактическим местоположением этих объектов для корректировки оценок положения, скорости и ориентации вертолета.
НАСА зафиксировало, что через 54 секунды полета произошел сбой в конвейере изображений, передаваемых навигационной камерой, из-за которого произошла потеря одного изображения. Но эта была не проблема, так как 1 кадр не влияет на алгоритм навигации. А вот далее случилась аварийная ситуация — все последующие навигационные изображения стали получать неправильные временные метки из-за предыдущего сбоя. С этого момента каждый раз, когда алгоритм навигации выполнял коррекцию на основе навигационных изображений, он работал на основе неверной информации о том, когда было снято изображение. В результате этого несоответствия начали происходить сбои в управлении вертолетом. Алгоритм пытался исправить ситуацию, так как в нем был заложен обход таких фантомных ошибок, но их было слишком много, больше планируемых — алгоритм мог отбрасывать только некоторые кадры, а не все. Из-за этого начались колебания вертолета, а его траектория стала нестабильной.
НАСА заложило в вертолет большой «запас устойчивости», поэтому его бортовые системы смогли справиться с аварией и посадить аппарат. Ранее пять полетов вертолета после взлета проходили штатно. Также «Индженьюити» повезло, что в алгоритме его посадки происходит отключение использования навигационной камеры и высотомера — вертолет переключается на IMU. Это позволяет аппарату выполнить плавное снижение вертикальной скорости, чтобы предотвратить аварийную посадку. Именно этот момент и помог в шестом полете «Индженьюити» за несколько секунд до посадки стабилизировать положение аппарата и не перевернуться при посадке.
Видео с навигационной камеры вертолета во время шестого полета. В течение последних 29 секунд полета «Индженьюити» качало и дергало, а посадка чуть не закончилась аварией.Ранее во время попытки выполнить четвертый полет у «Индженьюити» возникли проблемы со сторожевым таймером. Тогда ее решили перезагрузкой системы, вторая попытка четвертого полета оказалась успешной. Баг с тем, что у вертолета с вероятностью 15% происходит истечение времени сторожевого таймера и прекращение текущего выполнения полетных команд, в НАСА не победили.
Вертолет «Индженьюити» имеет массу 1,8 кг (0,68 кг в марсианской гравитации), четыре опоры с посадочными чашками, на его борту установлены две цветные камеры (0,5 МП для ориентации и 13 МП для аэрофотосъемки в 4K), система навигации, включая лазерный высотомер от SparkFun Electronics и гиростабилизатор (IMU), система передачи данных (канал связи до 250 Кбит/с на расстоянии до 800 метров от марсохода), а также аккумуляторные батареи и солнечная панель. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый, их обороты будут достигать 2 537 в минуту. Заряда батарей должно хватать на один полутораминутный полет, потом аппарату нужна посадка, подзарядка батарей, тестирование внутренних систем и заливка нового ПО для полета.
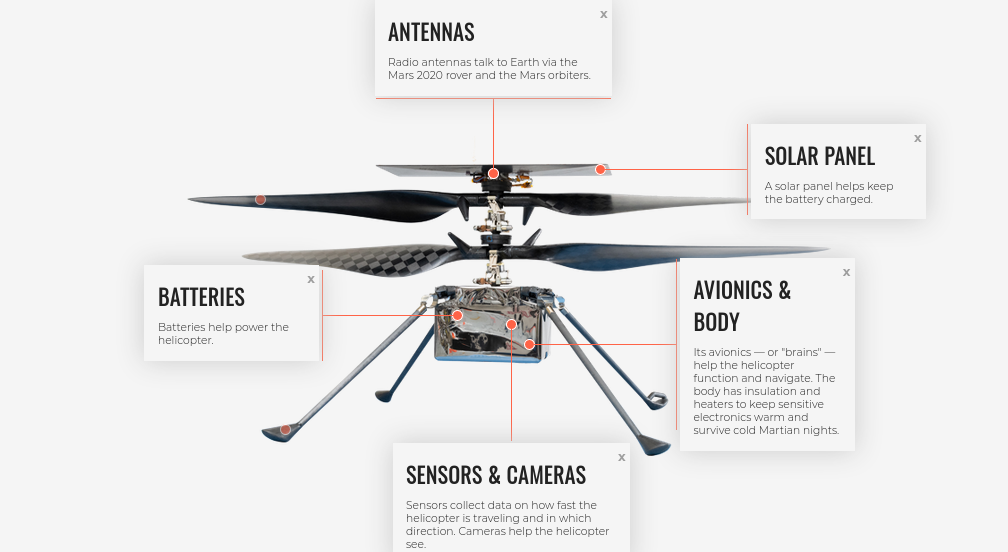
Элементы марсианского вертолета.Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила вчера руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
- 96 солов (марсианские сутки) на Марсе, 54 сола на поверхности планеты автономно, вертолет был рассчитан на 30 суток работы в условиях Марса, сейчас его миссию НАСА продлила до конца августа;
- температура за бортом во время полетов вертолета была от -21°C до -26°C, а по ночам достигала -90°C;
- первый самостоятельный отрыв от поверхности (всего выполнено шесть взлетов);
- первый автономный полет без управления или прерывания со стороны оператора с Земли;
- первая посадка БПЛА на Марсе (всего выполнено шесть посадок);
- вертолет задействовал в миссиях 3 посадочные площадки на Марсе;
- достиг высоты 10 метров (начинал с 3 метров, а потом поднялся на 5 метров) над поверхностью;
- двигался с максимальной скоростью до 4 метров в секунду;
- сделал аэрофотосъемку поверхности и сфотографировал марсоход;
- совершил стабильное парение;
- выполнил элементы бокового полета;
- пролетел за все миссии 714 метров над поверхностью Марса;
- прислал с помощью микрофона марсохода звуки своего полета;
- провел в режиме полета в атмосфере планеты 616 секунд.
Стоимость этого научного проекта составила $80 млн.
19 апреля «Индженьюити» совершил первый автономный полет. Видео первого полета «Индженьюити», сделанное марсоходом.
20 апреля НАСА показало на видео потоки марсианской пыли во время первого полета вертолета «Индженьюити».
21 апреля НАСА опубликовало подробное видео первого взлета и посадки вертолета «Индженьюити».
22 апреля 2021 года «Индженьюити» выполнил свой второй полет. Позже НАСА показало первые цветные изображения, полученные с вертолета «Индженьюити».
25 апреля 2021 года «Индженьюити» совершил третий 100-метровый полет и сфотографировал марсоход «Персеверанс».
30 апреля вертолет со второй попытки выполнил четвертый полет. Тогда же оператор вертолета Ховард Грип рассказал о фазах полета над поверхностью Марса во время его четырех миссий — взлете, парении и посадке.
7 мая НАСА опубликовало видео со звуком четвертого полета «Индженьюити» и рассказало, что марсианский вертолет «Индженьюити» успешно выполнил свой пятый полет и впервые перебазировался на новое место.
