«Индженьюити» успешно выполнил седьмой полет

Фото с навигационной камеры «Индженьюити» во время седьмого полета. Источник фото: НАСА.
Специалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) сообщили, что марсианский вертолет «Индженьюити» 6 июня 2021 года успешно выполнил свой седьмой полет на дистанцию 106 метров. Данная миссия длилась почти 63 секунды. Аппарат перебазировался на четвертое посадочное место, причем без предварительной разведки зоны приземления.
Седьмой полет «Индженьюити» был на юг от его предыдущего места посадки. Вертолет уже второй раз совершил посадку на новом месте, которое он ранее не изучал своими камерами. Специалисты НАСА полагались на изображения этого участка, полученные научной камерой HiRISE с борта Марсианского разведывательного орбитального аппарата (MRO). Они предварительно выбрали для посадки относительно плоское и без больших камней место на поверхности.
Сейчас марсоход «Персеверанс» выполняет свою научную миссию и находится на удалении от вертолета «Индженьюити». Аппараты работают раздельно и автономно.
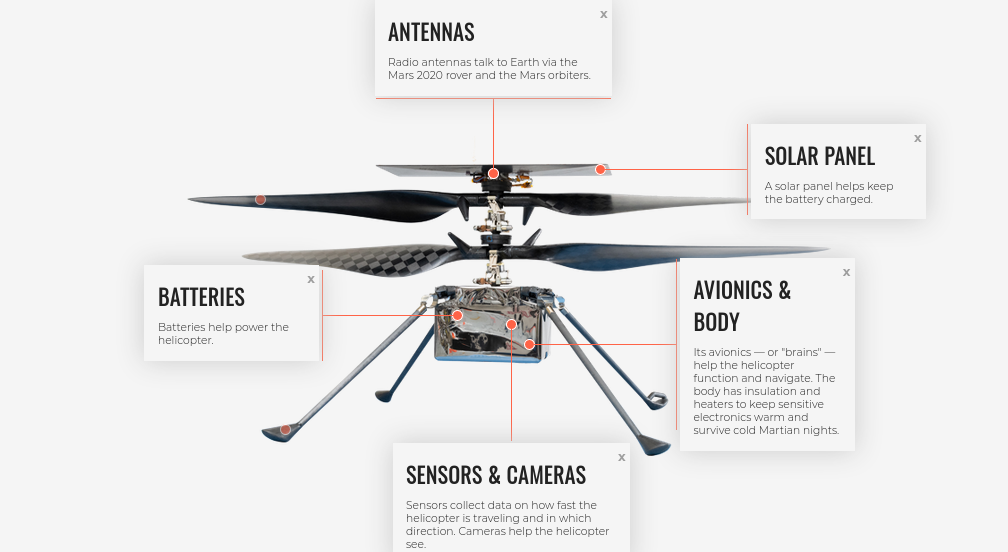
Вертолет «Индженьюити» имеет массу 1,8 кг (0,68 кг в марсианской гравитации), четыре опоры с посадочными чашками, на его борту установлены две цветные камеры (0,5 МП для ориентации и 13 МП для аэрофотосъемки в 4K), система навигации, включая лазерный высотомер от SparkFun Electronics и гиростабилизатор (IMU), система передачи данных (канал связи до 250 Кбит/с на расстоянии до 800 метров от марсохода), а также аккумуляторные батареи и солнечная панель. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый, их обороты будут достигать 2 537 в минуту. Заряда батарей должно хватать на один полутораминутный полет, потом аппарату нужна посадка, подзарядка батарей, тестирование внутренних систем и заливка нового ПО для полета.
Элементы марсианского вертолета.Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила вчера руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
Фактически «Индженьюити» на Марсе уже реализовал такие достижения:
- 107 солов (марсианские сутки) на Марсе, 65 солов на поверхности планеты автономно, вертолет был рассчитан на 30 суток работы в условиях Марса, сейчас его миссию НАСА продлила до конца августа;
- температура за бортом во время полетов вертолета была от -21°C до -26°C, а по ночам достигала -90°C;
- первый самостоятельный отрыв от поверхности (всего выполнено семь взлетов);
- первый автономный полет без управления или прерывания со стороны оператора с Земли;
- первая посадка БПЛА на Марсе (всего выполнено семь посадок);
- вертолет задействовал в миссиях 4 посадочные площадки на Марсе;
- достиг высоты 10 метров (начинал с 3 метров, а потом поднялся на 5 метров) над поверхностью;
- двигался с максимальной скоростью до 4 метров в секунду;
- сделал аэрофотосъемку поверхности и сфотографировал марсоход;
- совершил стабильное парение;
- выполнил элементы бокового полета;
- пролетел за все миссии 820 метров над поверхностью Марса;
- прислал с помощью микрофона марсохода звуки своего полета;
- провел в режиме полета в атмосфере планеты 679 секунд.
Стоимость этого научного проекта составила $80 млн.
19 апреля «Индженьюити» совершил первый автономный полет. Видео первого полета «Индженьюити», сделанное марсоходом.
20 апреля НАСА показало на видео потоки марсианской пыли во время первого полета вертолета «Индженьюити».
21 апреля НАСА опубликовало подробное видео первого взлета и посадки вертолета «Индженьюити».
22 апреля 2021 года «Индженьюити» выполнил свой второй полет. Позже НАСА показало первые цветные изображения, полученные с вертолета «Индженьюити».
25 апреля 2021 года «Индженьюити» совершил третий 100-метровый полет и сфотографировал марсоход «Персеверанс».
30 апреля вертолет со второй попытки выполнил четвертый полет. Тогда же оператор вертолета Ховард Грип рассказал о фазах полета над поверхностью Марса во время его четырех миссий — взлете, парении и посадке.
7 мая НАСА опубликовало видео со звуком четвертого полета «Индженьюити» и рассказало, что марсианский вертолет «Индженьюити» успешно выполнил свой пятый полет и впервые перебазировался на новое место.
27 мая «Индженьюити» с проблемами выполнил свой шестой полет на дистанцию 215 метров с максимальной высотой 10 метров и скоростью до 4 м/c. Аппарат перебазировался на третье посадочное место, но с ним начались проблемы во время полета — сбоили таймер камеры, система навигации и электропитания. Также он чуть не перевернулся при посадке, отклонения по крену и тангажу перед этой процедурой были более, чем на 20 градусов.
28 мая НАСА выложило в открытый доступ более 390 фотографий с бортовых камер вертолета.
