HD FPV на Raspberry Pi. Работа над ошибками
В предыдущей статье я рассказал о возможности полетов HD FPV на базе Raspberry Pi с организацией вайфай моста с помощью модулей Ubiquiti Bullet M2 HP. Первый блин вышел комом. Результат эксперимента получился, как говорится: «третий сорт — не брак», с некоторыми серьезными оговорками и «граблями», но основная цель эксперимента была достигнута. Идея получить HD FPV по проводам вайфаю была успешно опробована.Как я и предполагал, публикация на хабре не только непомерно завышает ЧСВ повышает карму, но и позволяет услышать мнение хабрасообщества и получить очень ценные рекомендации и дельные советы. В комментариях к статье советы были получены, чуть позже осмыслены и третьего дня реализованы.Что было реализовано, исправлено и дополнено
Эксперимент 1. Используемые антенны с круговой поляризацией. «клевер» на земле и на борту.
Эксперимент 2. Используемые антенны с линейной поляризацией. На земле секторная 70град х 70град, на борту «штырь».
Запись принимаемого видеопотока на земле, для дальнейшего анализа.
Борт с полетными «мозгами» Ardupilot 2.0 для стабилизированного полета. В случае потери связи (визуальной, видео, РУ) с бортом, возможность автоматического возврата на базу.
Исправлен досадный баг ДНК прошлого эксперимента. Оба вайфай модуля жгли работали на полную мощность 28dBm.
Матчасть
Антенное хозяйство на земле. В зависимости от эксперимента к ВЧ разъему вайфай модуля подключался, либо «клевер», либо секторная антенна.
Первый блин вышел комом. Результат эксперимента получился, как говорится: «третий сорт — не брак», с некоторыми серьезными оговорками и «граблями», но основная цель эксперимента была достигнута. Идея получить HD FPV по проводам вайфаю была успешно опробована.Как я и предполагал, публикация на хабре не только непомерно завышает ЧСВ повышает карму, но и позволяет услышать мнение хабрасообщества и получить очень ценные рекомендации и дельные советы. В комментариях к статье советы были получены, чуть позже осмыслены и третьего дня реализованы.Что было реализовано, исправлено и дополнено
Эксперимент 1. Используемые антенны с круговой поляризацией. «клевер» на земле и на борту.
Эксперимент 2. Используемые антенны с линейной поляризацией. На земле секторная 70град х 70град, на борту «штырь».
Запись принимаемого видеопотока на земле, для дальнейшего анализа.
Борт с полетными «мозгами» Ardupilot 2.0 для стабилизированного полета. В случае потери связи (визуальной, видео, РУ) с бортом, возможность автоматического возврата на базу.
Исправлен досадный баг ДНК прошлого эксперимента. Оба вайфай модуля жгли работали на полную мощность 28dBm.
Матчасть
Антенное хозяйство на земле. В зависимости от эксперимента к ВЧ разъему вайфай модуля подключался, либо «клевер», либо секторная антенна. Борт со «штырем»
Борт со «штырем»
Борт с «клевером»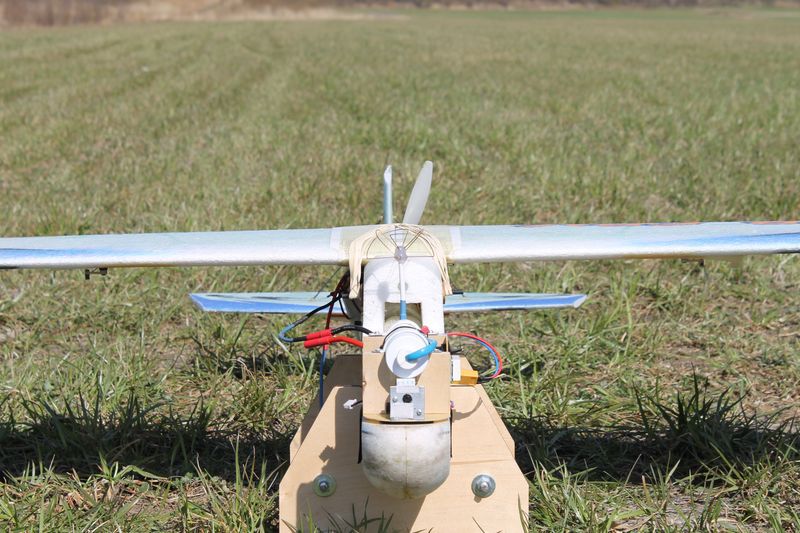
Ардупилот 2.0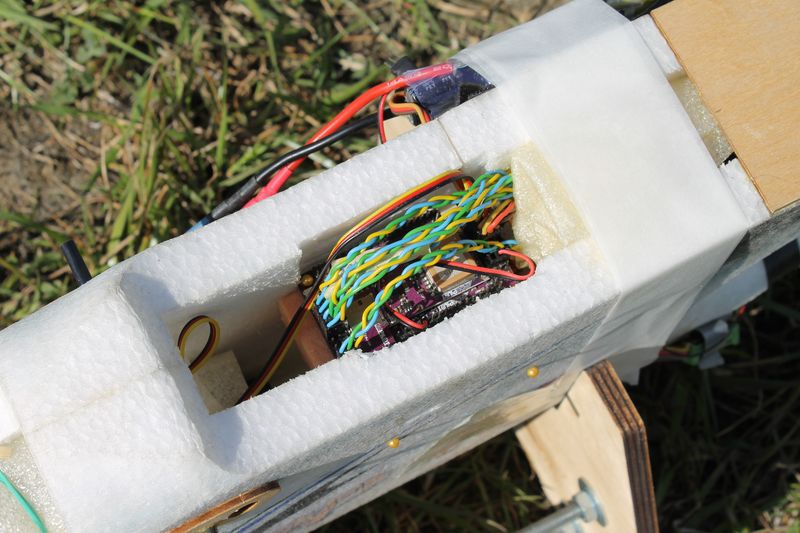
Много видео Тестовый полет на штыревой антенне, на земле секторная.[embedded content]Тестовый полет на «клеверах»[embedded content]
Результаты оказались на удивление весьма неплохие. Объективно «клевер» отработал лучше, поэтому все дальнейшие тесты проводились на «клеверах».
Тестовые полеты на дальность проводились в двух разрешениях HD 1280x720 и 800x6001280х720[embedded content]
800x600[embedded content]За это разрешение прошу не ругать… мол обещано HD, а тут не оно. Исключительно в целях эксперимента. В дальнейшем будут тесты вплоть до 320х200
Радиус уверенного приема перевалил за 700 метров!
Решили протестить Full HD1920x1080[embedded content]Результат немного предсказуем, недалече… но РАБОТАЕТ!
Еще тесты на дальность и посадка по монитору. Тут придется поверить на слово… пилот действительно сажал пенолет силой мысли глядя в монитор наземного компьютера.800x600[embedded content]
Выводы и ближайшие планы По сравнению с прошлым экспериментом результат значительно улучшился. Система работает и есть куда летать копать дальше. Вопрос взлетит или не взлетит уже не стоит. Однозначно HD FPV взлетел!Более детально продумать расположение антенны на борту. Протестировать вариант с потолочной антенной линейной поляризации (она уже ожидает на почте). Протестировать работу системы на высоте — это потребует переделки пенолета, т.к. он не шибко силен и в высь забирается очень печально медленно. Опробовать 5.8 ггц модули, тут есть интересное предложение от хабраюзера kunks. Отдельным фронтом работ открываются возможности по реализации OSD — наложение полетной информации на транслируемую картинку. Пилоту уже очень надо наводить борт на цель получать высоту и напряжение бортовой АКБ. Интересно построить GPS треки полетов и совместить их с видео, для более глубоких экспериментов и анализа эффективной дальности. В наличии уже имеется USB GPS, подключал его к малине, NMEA валит так, что не остановить. В наличии решение с подключением гироскопа MPU-9150 по шине I2C к малине, можно конечно требуемые данные получать с Ardupilot… тут вопрос пока открытый.
