Гусеничный автономный робот. Платформа для Ваших роботов
DIY разработка. Ошибки и грабли. Возможные сферы применения.
Я покажу свой опыт как сделать автономный гусеничный робот, не раздувая щеки и бюджет. Задача оказалась достаточно интересной, а в процессе реализации я собрал все грабли, которые cмог.
Гусеничное шасси
Мне помог с корпусом и шасси Алексей Беляков, с которым вместе мы сотрудничаем давно и писали статью о промышленном дизайне.
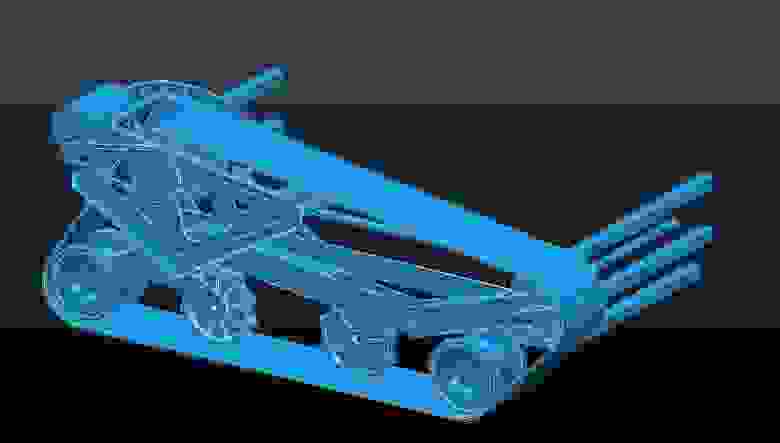
Примерная схема компоновки с которой начали работу и подбор комплектующих. Так как раздувать бюджет не хотелось нужно было выбирать из комплектующих доступных в продаже. Приступили к выбору гусениц.

Корпус

Как сказал бы мой внутренний гуманитарий »Общий вид должен быть агрессивный, напористый, технологичный, транслирующий уверенность и стремление к решению задачи, демонстрирующий инновационную начинку робота». Кроме эстетической стороны, должна быть возможность быстрого прототипирования и перехода к вакуумной формовке при производстве в дальнейшем. Эскизных вариантов было большое количество, глаза разбегались и хотелось сделать все.
Другие варианты дизайна
В итоге была выбрана концепция, по которой проектировали корпус.

Моторы и контроллеры
Изначально планировал использовать BLDC моторы. Есть большой опыт в настройке контроллеров Kelly, писал об этом статью. Так как хотелось иметь запас по мощности я решил использовать по мотору 1кВт на каждую ось. Напряжение я решил выбрать 48В, так как для этого напряжения есть огромное количество доступных контроллеров, BMS. Моторы с Али MY1020

Так как в приоритете высокий момент решил использовать редуктор с большой степенью редукции 1:10 и более. Первые опыты с двухступенчатым цепным редуктором не увенчались успехом.

Хотелось мотор в закрытом корпусе закрытом от грязи, я выбрал мотор-редукторы с червячным приводом, забегая вперед скажу, что это не самое лучшее решение в плане КПД, но это рабочий вариант. Очень долго искал бюджетный, в итоге выбрал NRV в фирме Подольск Привод. Для того, чтобы соединить мотор и редуктор необходимо было выточить вал и муфту.
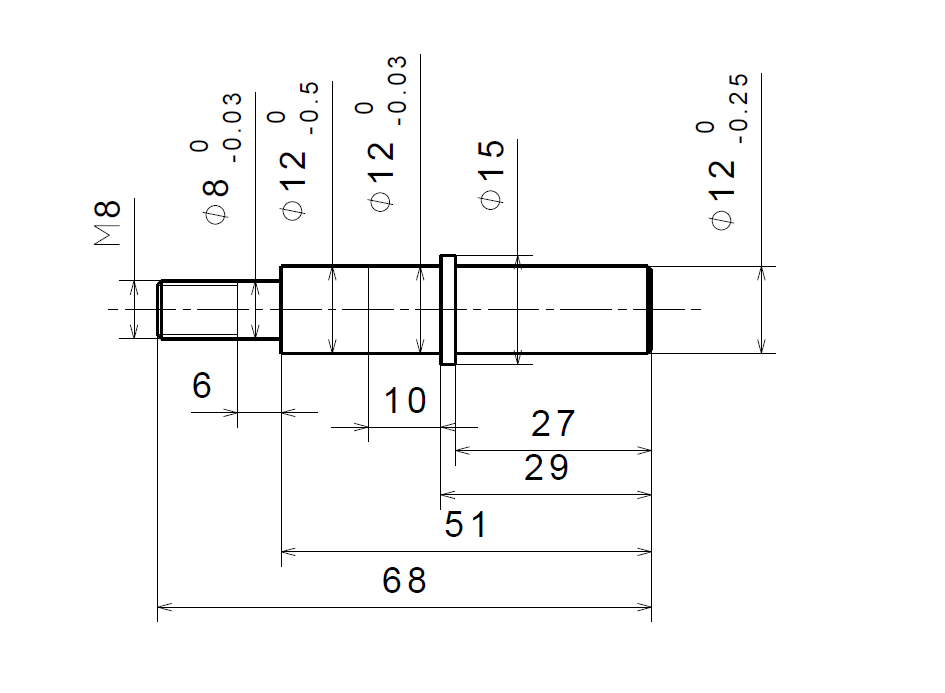 Вал
Вал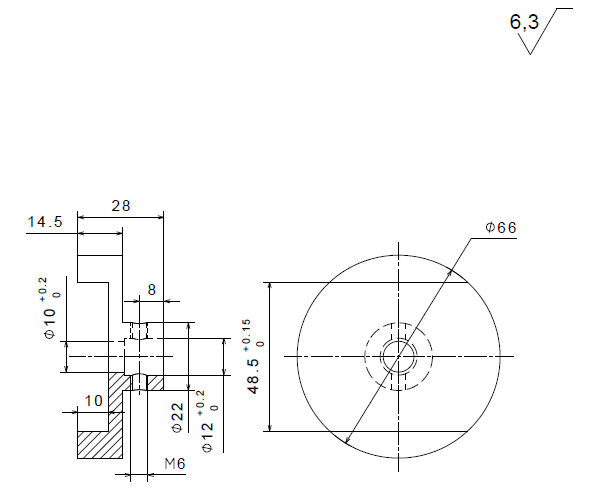 Муфта
Муфта
Батарея
Батарею решено было сделать из призматиков LiFePo4 по 50Ампч. Самый экономичный и неприхотливый вариант с огромным количеством недорогих BMS и возможностью работать при температуре ниже 0.

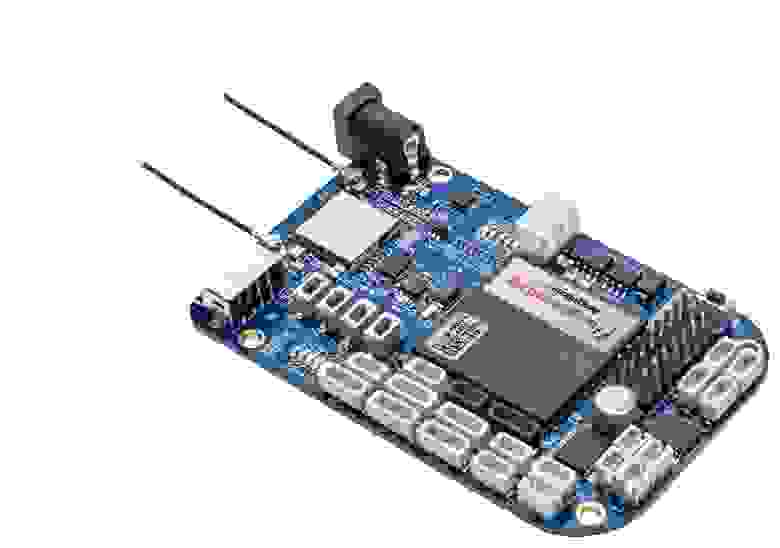
Плата управления
Спроектировал плату управления в EasyEDA, там же и заказал.

На плате управления:
микроконтроллер Atmega, чтобы от православной ардуины далеко не отходить;
Гребенка для связи с Jetson nano на будущее;
Управление моторами и считывание показаний энкодеров через опторазвязки;
Реле для управления навесным оборудованием.
Разъемы для подключения приемника радиоуправления
Разъем для соеднинения BeagleBone компьютера.
И естественно, с первого раза все на перемычках, где-то дорожка не туда пошла, где-то что-то забыл. Это как синяя изолента при прототипировании на удачу.

Ardupilot и Mission planer
Управление платформой с пульта дистанционного управления хоть и весело, позволяет закрыть Гештальт и залечить детские травмы, но не так технологично как автономный робот.
Для решения задач патрулирования или проезда по маршруту можно использовать ROS, но самым простым вариантом является использование Ardupilot, я писал статью о настройке.
С BeagleBone мы получаем два RC-канала, для левой и правой гусеницы, вся остальная магия происходит внутри Ardupilot, там же и настройки. BB создает точку WiFi, цепляясь к ней мы можем управлять роботом еще и с джойстика и получать телеметрию.
Использование радио-модулей, например Holybro позволяют получать данные и управлять роботом на расстоянии около 1000 метров. Для большего радиуса можно использовать ZigBee Pro.

Во вкладке Flight plan создаем маршрут, загружаем по WiFi в робота и отправляем его по маршруту.

Робот едет на испытания

Ко мне обращались из нескольких организаций с потребностью в автономном роботе или операторозависимой гусеничной платформе. Речь шла о роботе для передвижения легкомоторных самолётов и вертолетов из ангара, автономный робот для обработки полей от борщевика, рое роботов для передвижения мишеней на полигоне.
Гусеничная платформа не цель, а скорее средство. Это лишь способ доставить навесное оборудование решающее определенные задачи. Наличие платформы с высокой проходимостью и возможностью удаленного управления позволяет сфокусироваться. Готов к сотрудничеству и решению интересных задач. Если Вам интересно делать роботов, Вы готовы учиться новому — напишите мне.
