Гинекологи отработали малоинвазивную гистероскопию на инновационном тренажёре с тактильной обратной связью
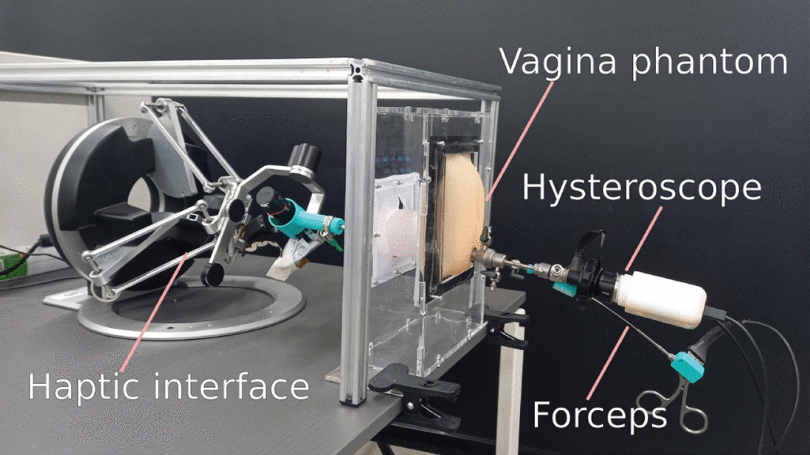 Тренажёр для гинекологов для отработки амбулаторной гистероскопии. Слева — интерфейс для обеспечения тактильной обратной связи при выполнении упражнения. Справа — эндоскоп с встроенными щипцами, макет влагалища. Изображение с камеры (симуляция) транслируется в реальном времени на монитор компьютера (за кадром). Источник: Владимир Поляков и др./IEEE Transactions on Medical Robotics and Bionics
Тренажёр для гинекологов для отработки амбулаторной гистероскопии. Слева — интерфейс для обеспечения тактильной обратной связи при выполнении упражнения. Справа — эндоскоп с встроенными щипцами, макет влагалища. Изображение с камеры (симуляция) транслируется в реальном времени на монитор компьютера (за кадром). Источник: Владимир Поляков и др./IEEE Transactions on Medical Robotics and Bionics
Учёные «Сколтеха» и Лёвенского католического университета разработали тренажёр для гистероскопии с тактильной обратной связью для гинекологов. Во время процедуры гистероскопии специалист вводит эндоскоп без вспомогательных инструментов в матку для диагностики патологий. Предложенная технология позволяет отрабатывать безболезненное и минимально инвазивное проведение гистероскопии без анестезии.
Амбулаторная гистероскопия — гинекологическая процедура, в ходе которой для диагностики внутриматочных патологий и проведения несложных операций через вагинальный канал и шейку матки вводится эндоскоп, иногда — с встроенным хирургическим инструментом. При правильном выполнении процедура вызывает у пациентки существенно меньше неудобств и дискомфорта, чем гистероскопия в стационаре: не нужна анестезия и не производится предварительных манипуляций с маткой и расширения канала шейки матки инструментами.
«Несмотря на ряд неоспоримых преимуществ для пациентки, процедура вызывает ряд сложностей у врача. Нужно в режиме реального времени отслеживать уровень дискомфорта проходящей обследование женщины, аккуратно вводить эндоскоп без зеркала и других вспомогательных инструментов и, что особенно трудно, проводить его через не расширенный канал шейки матки, анатомия которого бывает довольно сложной», — рассказывает первый автор исследования, аспирант «Сколтеха» Владимир Поляков…
Недостаток возможностей для отработки этих навыков в конечном итоге ведёт к тому, что клиники чаще отдают предпочтение более инвазивной и обременительной для пациентки процедуре стационарной гистероскопии. Она проще для врача, и для неё уже есть тренажёры.
«Нашим тренажёром мы с коллегами стремимся заполнить пробел в обучении гистероскопии, чтобы сводить к минимуму инвазивность и неудобства. Насколько нам известно, у нашего первого прототипа нет коммерчески доступных аналогов с хаптической [тактильной] обратной связью» — продолжил Поляков.
При создании тренировочной системы учёные руководствовались результатом собственного опроса среди практикующих гистероскопистов, которые указали на важность наличия в тренажёре обратной связи и определили, какие аспекты процедуры —, а значит, и степени свободы системы — имеют наибольшее значение для врачей.
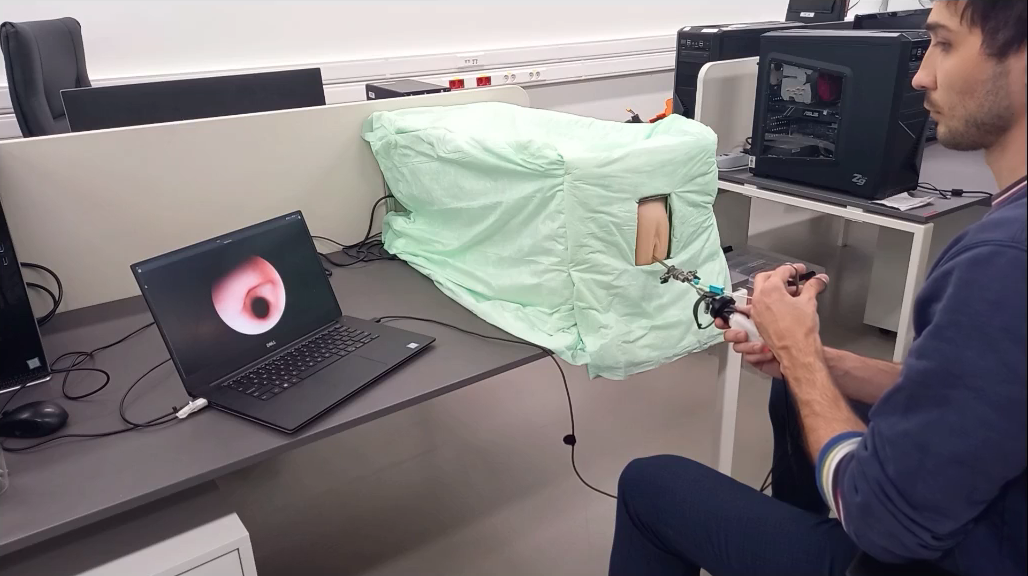 Обучающийся выполняет упражнение по прохождению цервикального канала и сбору контрольных точек эндоскопическими щипцами в маточной полости на тренировочном симуляторе для отработки амбулаторной гистероскопии. Источник: Владимир Поляков и др./IEEE Transactions on Medical Robotics and Bionics
Обучающийся выполняет упражнение по прохождению цервикального канала и сбору контрольных точек эндоскопическими щипцами в маточной полости на тренировочном симуляторе для отработки амбулаторной гистероскопии. Источник: Владимир Поляков и др./IEEE Transactions on Medical Robotics and Bionics
Тренажёр представляет собой макет влагалища и гистероскопический набор: обучаемый одной рукой вводит эндоскоп, а другой управляет встроенными щипцами, которыми в учебном симуляторе производится сбор условных контрольных точек в полости матки. Это позволяет отработать не только ключевой навык прохождения шеечного канала, но и согласованную работу двумя руками. На дальнем конце тренировочного гистероскопа подключён хаптический интерфейс — высокоточный робот Omega.7 компании Force Dimension для обеспечения тактильной обратной связи. На экран компьютера в режиме реального времени выводится картинка с камеры эндоскопа — она генерируется на основе симуляции взаимодействия инструмента и виртуальной модели матки.
Создатели тренажёра валидировли его на 17 испытуемых, которых разделили на три группы на основании сравнения опыта выполнения гистероскопии: новички, средний уровень и эксперты. Система позволила достаточно точно распознать по нескольким показателям качества выполнения упражнения каждую группу испытуемых. «Более того, в группе новичков после пяти попыток пять из шести показателей улучшились», — заметил Поляков. Всё это говорит о том, что устройство имеет потенциал с точки зрения обучения навыкам, необходимым в амбулаторной гистероскопии, то есть такой, которая проводится при посещении кабинета врача, без госпитализации.
«Цервикоскопия и гистероскопия являются очень важными методами для диагностики репродуктивной системы женщин. Такие методы диагностики применяют в современных клиниках, таких, например, как израильская клиника «Хадасса Медикал», расположенная в Сколково. Однако на данный момент на рынке нет современных тренажёров, которые бы позволили получить реалистичный опыт работы с инструментом. Мы смогли реалистично воспроизвести не только визуальную составляющую, но и обеспечить стажёру тактильное восприятие при перемещении гистероскопа по цервикальному каналу. У нашей разработки есть большой потенциал для коммерциализации на европейском и российском рынке, поскольку клиники проявляют большой интерес к технологии. Огромная заслуга в успехе проекта принадлежит профессору Лёвенского католического университета Эммануэлю Вандер Поортену, который является одним из лидеров в Европе по направлению медицинских роботов», — добавил доцент Дмитрий Тетерюков, один из авторов исследования, заведующий Лабораторией интеллектуальной космической робототехники Сколтеха.
Разработка представлена в журнале IEEE Transactions on Medical Robotics and Bionics.
