Гексапод Б.У.Н.Т
Насмотревшись на youtube видео про гексаподов (особенно впечатлил PhantomX), решил попробовать свои силы в роботостроении. Забегая вперёд — всё получилось и вот результат: 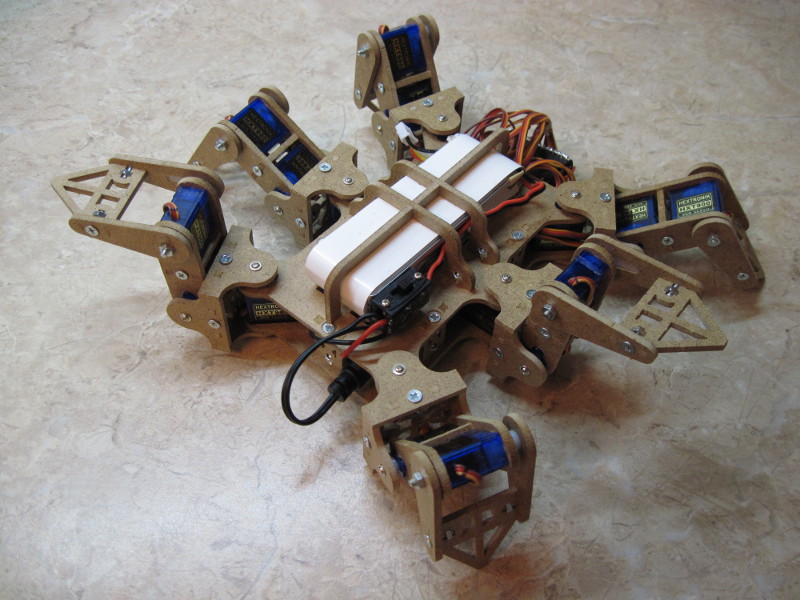 Всех интересующихся прошу под кат, там вкратце описана история создания и трудности с которыми пришлось столкнуться, а так же видео работы гексапода. Ни каких графиков, схем и кода, только лирика.С arduino уже был знаком, но с сервприводами не работал. Долго читал, разбирался в ассортименте серв, в итоге решил взять миниатюрные HXT900, хотя в данном посте и говорилось, что на слабеньких сервах гексапод еле стоял на ногах, но я решил рискнуть. Так же заказал Arduino Mega, аккумулятор Turnigy 2200mAh 3S 20C Lipo Pack и стабилизатор TURNIGY 8–15A UBEC. Получив всё необходимое, снял все размеры штангенциркулем и начал рисовать сначала дизайн, а потом уже и чертёж самого гексапода. За праобраз взял PhantomX, понравилось как у него сервы расположены. За неимением алюминия и неумением резать оргстекло на станке, было решено делать все детали из трёхмиллиметровой мдф, о чём пожалел, но об этом позже. Собственно из-за материала корпуса и пришло в голову назвать гексапода Б.У. Н.Т. — Буратино Уже Не Тот. Для уменьшения размеров, «уши» у серв были безжалостно спилены, что видно на фотографиях ниже.Фотографии процесса сборки
Соединяем две сервы в единый блок.
Всех интересующихся прошу под кат, там вкратце описана история создания и трудности с которыми пришлось столкнуться, а так же видео работы гексапода. Ни каких графиков, схем и кода, только лирика.С arduino уже был знаком, но с сервприводами не работал. Долго читал, разбирался в ассортименте серв, в итоге решил взять миниатюрные HXT900, хотя в данном посте и говорилось, что на слабеньких сервах гексапод еле стоял на ногах, но я решил рискнуть. Так же заказал Arduino Mega, аккумулятор Turnigy 2200mAh 3S 20C Lipo Pack и стабилизатор TURNIGY 8–15A UBEC. Получив всё необходимое, снял все размеры штангенциркулем и начал рисовать сначала дизайн, а потом уже и чертёж самого гексапода. За праобраз взял PhantomX, понравилось как у него сервы расположены. За неимением алюминия и неумением резать оргстекло на станке, было решено делать все детали из трёхмиллиметровой мдф, о чём пожалел, но об этом позже. Собственно из-за материала корпуса и пришло в голову назвать гексапода Б.У. Н.Т. — Буратино Уже Не Тот. Для уменьшения размеров, «уши» у серв были безжалостно спилены, что видно на фотографиях ниже.Фотографии процесса сборки
Соединяем две сервы в единый блок.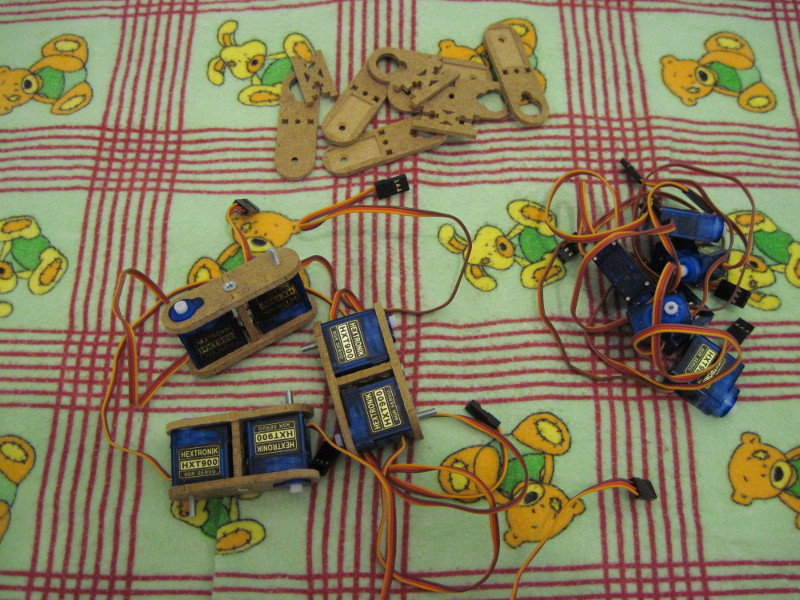 Режем детали корпуса
Режем детали корпуса
Корпус в сборе, вот только данная тушка мне показалась толстовата — пришлось переделывать, а эта в мусор.
Последние штрихи — тушка собрана, осталось прикрутить лапки.
Фотографий мало, как-то увлёкся процессом и совсем забыл фотографировать. Если обратили внимание — на двух последних фотографиях аккумулятор выглядит по разному — на последней он уже без этикетки. Просто когда оформлял заказ, как-то совсем не подумал, что нужно ещё купить специфический коннектор XT60 для подключения к аккумулятору нагрузки. В итоге пришлось «откусывать» разъём и паять. По моей криворукости неаккуратности произошло короткое замыкание и напряжение на проводах пропало. Померив мультиметром напряжение на выводах зарядного разъёма, понял, что пропал контакт между «банками». Разобрал аккумулятор, нашёл разрыв — перегорел алюминиевый «лепесток» (минус) у одной банки, причём почти под корень. Попробовал подпояться —, но имеющаяся паяльная кислота алюминий не берёт. Расстроился, хотел было уже заказывать новый аккумулятор, но после недолгого гугленья был куплен флюс Ф64, с которым, как оказалось, паять алюминий не сложнее чем медь. С трудом смог подпаяться к остаткам «лепестка» и аккумулятор был реанимирован. Далее, на этапе сборки обнаружилось, что идея использовать Mega Sensor Shield оказалась неудачной — из-за него тушка получалась слишком толстой и некрасивой. Пришлось переделать чертежи и уменьшить толщину тушки до высоты сервопривода, что в итоге привело к тому, что провода от серв в саму тушку целиком не вместились — часть на которую подаётся питание была вынесена наружу. Но даже так красивее (да и прочнее), чем с толстой тушкой. Собирать мелкие детали из мдф — то ещё удовольствие. Без напильника соединения просто не входят друг в друга, хоть и оставлен зазор — мешают острые края. Вся конструкция выглядит хлипковатой, есть небольшие люфты, но в целом получилось не плохо и достаточно надёжно, главное не мочить, а то поведёт. Гексапод собран, первый тест и оказывается что он прекрасно стоит на ногах и полностью выдерживает свой вес. Весит он кстати 640 грамм. В первых экспериментах по своей криворукости из-за досаднейшей ошибки в коде у одной из серв сорвало шестерёнку — был указан слишком большой угол и нога упёрлась в тушку. Пришлось разбирать и менять серву, благо взял с запасом. После недолгих раздумий был написан небольшой скетч для простой прямолинейной ходьбы. Скетч мне выкладывать стыдно, а вот видео первых шагов гексапода покажу с удовольствием.Видео [embedded content][embedded content]
[embedded content]
Итого: Собрать гексапода не так уж и сложно Микросервы не такие уж и слабые Не скупитесь на / не забывайте коннекторы для аккумулятора — паять под напряжением плохая идея Сервы всегда берите с запасом Если есть возможность — делайте из алюминия, если нет — тогда из пластика (оргстекла), в крайнем случае из мдф, хотя нет, из мдф лучше вообще не делайте Далее у меня в планах научиться управлять гексаподом по bluetooth с джойстика от PS3 ну или хотя бы со смартфона, но это уже другая история.И да, чуть не забыл, все комплектующие, мдф и прочее обошлись мне примерно в 5 тысяч рублей. С джойстиком, шилдом (который оказался ненужен) и прочей мелочёвкой (которая тоже почти не использовалась) получается примерно 6 тысяч. Но и качество готового изделия далеко от PhantomX, но я был к этому готов.
