DeltaXY механика для 3д принтера
Доведя до ума SCARA 3D принтер и добившись достаточного качества печати я начал думать над следующей поделкой. Это само собой должен быть 3д принтер.
Для себя я решил, что новый принтер должен соответствовать таким критериям:
- Маленький (область печати 10×10 см) — большой принтер у меня уже есть и теперь хочется второй на котором можно будет печатать тонким соплом и тонкими слоями небольшие детали (шестеренки и т д)
- Быстрый
- На какой-то не стандартной кинематике
Кинематика
Долго думал и перебирал кинематики которые позволяли печатать с высокой скоростью, простыми и компактными.
H-bot, corexy хорошие кинематики, но требуют много деталей и относительно сложны. Delta простая, но компактность под вопросом (да и была у меня уже такая). Кинематики с подвижным столом не устраивали из за ограничениям по компактности. Scara хорош, но у меня уже есть. Articulated arm — тоже хорошая, но пока отложил на будущее (к стати мою scara если повернуть на 90 градусов то это будет уже половина articulated arm). Долго думал, выдумывал экспериментировал и как то случайно зацепился за дельта кинематику, но для 2d случая.
Вариантов убрать одно измерение была 2: xy и хz.
XZ — начал прототипировать, но получил проблему — рычаги отвечающие за перпендикулярность сопла к столу плохо отрабатывали свою роль — скорее всего это вариант, но точность изготовления должна быть намного лучше чем у меня получилось.
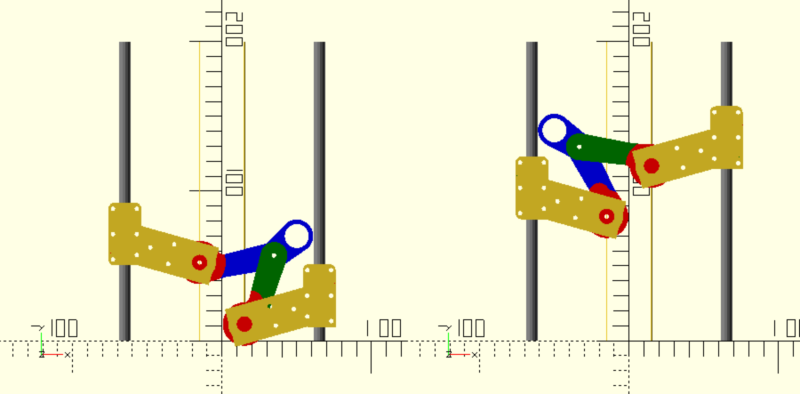
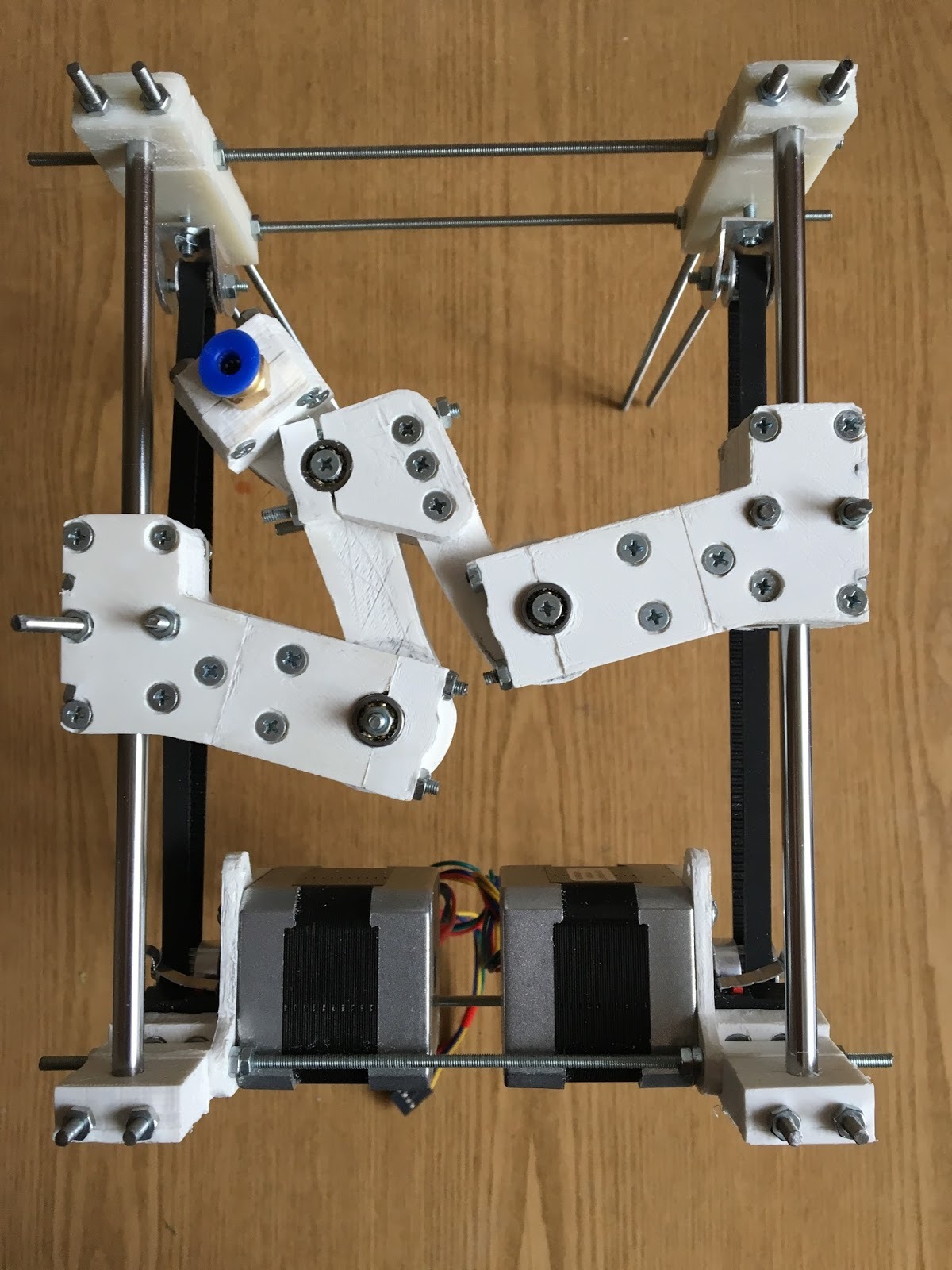
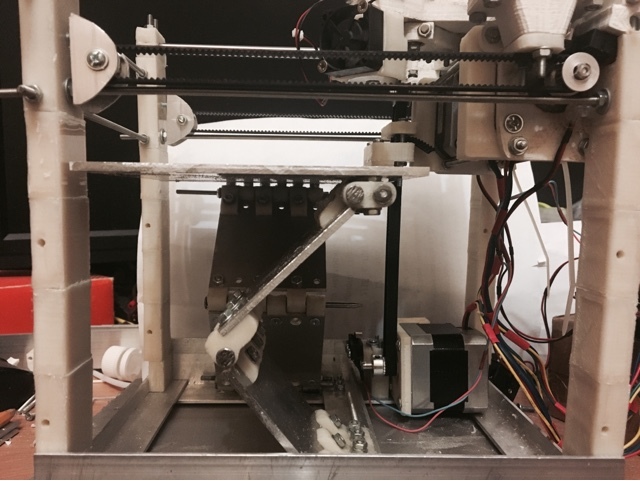
XY — тут я был доволен как она заработала и тем, что количество деталей было минимально, также столкнулся с проблемой компактности, но перенеся центры рычагом ближе к оси Y, получилось добится неплохой компактности — в классической дельте конечный манипулятор не может заходить за оси линейного передвижения, a для XY это оказалось не проблемой.Ось XY
Опыт мне подсказывал, что первая версия скорее всего будет далеко от идеала и я решил делать все максимально быстро и не особо вкладываясь в конструкцию, внешний вид и детали, заодно как обычно ещё и проверю другие идеи которые у меня были. Собственно базу xy я собрал и спроектировал за 1 неделю. Она заработала и её результат мне очень понравился.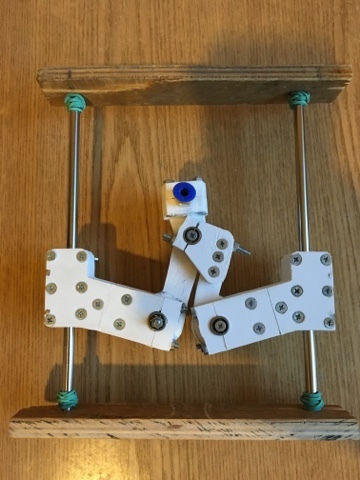
Ось Z
Почти 100% рабочий вариант это две линейных направляющие 4 подшипника, ремень или трапециевидная шпилька с гайкой, работает и проверено всеми. Но так как я заранее решил что буду экспериментировать решил использовать Sarrus linkage. Первые шарниры были напечатаны из пластика полностью, но прочностью особо не отличались, вторая попытка это 3mm алюминий и печатные петли — меня устроили. Ещё неделя и платформа была готова.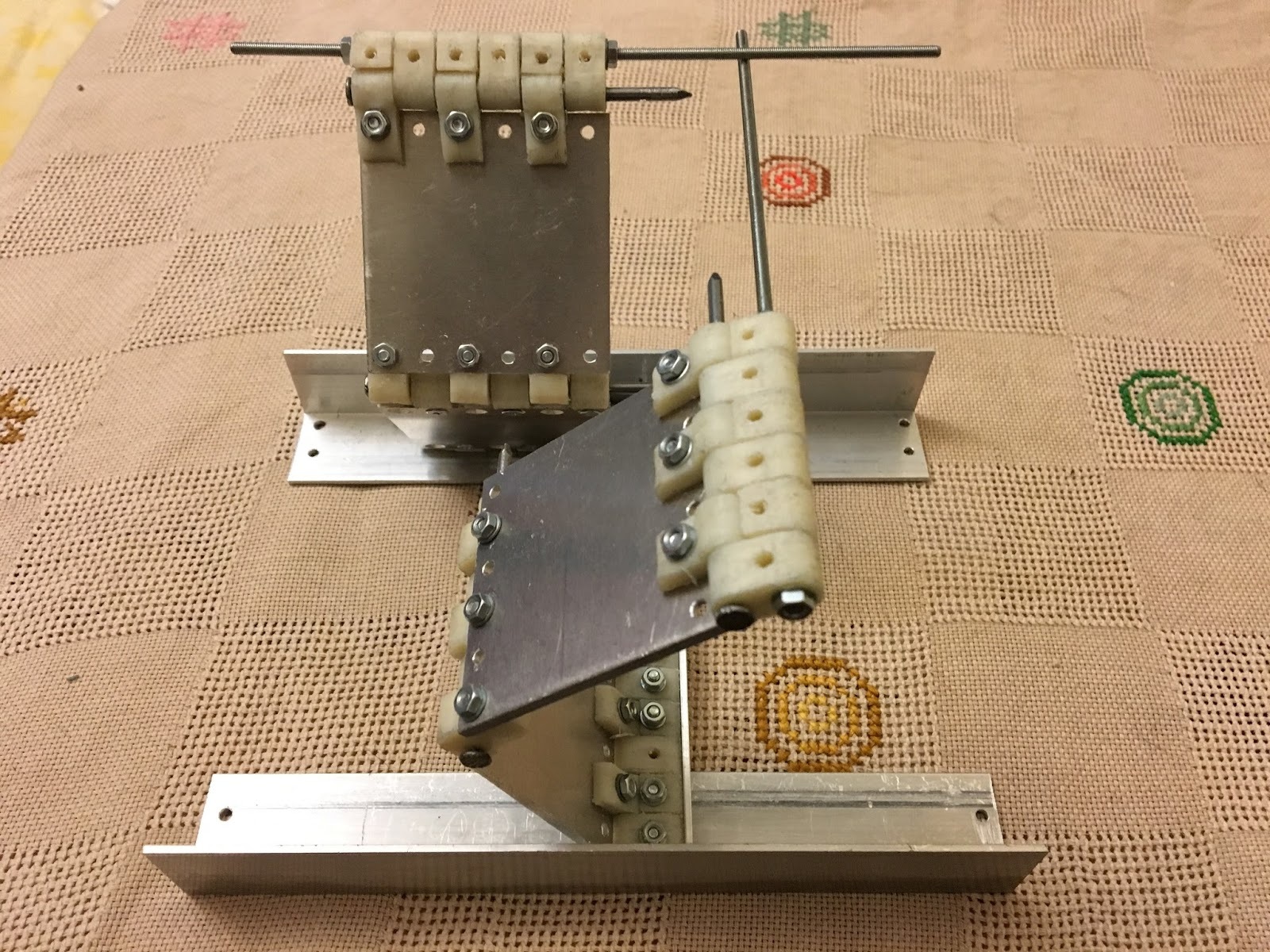
Подогреваемая поверхность
Собственно писать тут обычно нечего, кроме метода которым я подбирал длину и сечение нихромовой проволоки.
Суть метода — вместо использования всяких онлайн калькуляторах (а я перепробовал их достаточно), а можно взять ватт Метр и передвигая по проволоке плюс или минус 12в подобрать нужную длину для требуемого потребления — меня устроило 40 ватт — получилось в районе метра для 0.4 или 0.5 (я даже не запомнил) нихромовой проволоки, если меня не устраивала длина отрезка то тоже самое делалось для сечения тоньше или толще. (Стол до 110 градусов нагревался в результате минут за 7)Результат
Прошивка
Онлайн визуализатор
OpenScad файлыВывод
Тест кинематики — очень доволен — сейчас планирую вторую версию, но уже на рельсах и из алюминия (я просто влюбился в данный материал)
Тест оси Z — оставил двоякое впечатление, во второй версии явно использовать не буду — для большого стола 20×20 и с 4 мя блоками вышло бы лучше.Для тех кто дочитал
В процессе проверил прототип ещё одной идеи — радиатор хот Энда с охлаждением при помощи импеллера.
Одно картинка вместо тысячи слов.
