5 датчиков автопилота и их (пока) неразрешимые трудности

Первая часть обзора проблем автопилота отлично зашла и время двигаться дальше. Жизнь не стоит на месте и «Теслы» все так же бьются (Tesla Model X тоже, но пока без помощи автопилота). Что не так с датчиками систем ADAS? И почему в ближайшие годы ничего кардинально не изменится?
Многие, как ни удивительно, приблизились к своим физическим возможностям. Об этом можно говорить уверенно, потому что перечисленные ниже системы используются не только на автомобилях и имеют крупные рынки сбыта за пределами автомира. Это большие деньги, миллиардные бюджеты на R&D и достаточно медленный прогресс.
Теперь подробнее.
Видов датчиков — как пальцев на руке, пять:
- камеры,
- радары,
- лидары,
- ультразвук,
- инфракрасные камеры.
Классификация выбрана для удобства, а не соблюдения технологической правды. Вообще делить можно по-разному:
- пассивные (камеры) и активные (радары-лидары),
- в видимом диапазоне (камеры) и нет (все остальные, в том числе ИК),
- по частотам (от ультразвука к лидарам).
Все перечисленные датчики сильно отличаются по своей природе и выдают в электронный мозг разную информацию.
Что важно знать о рынке в целом?
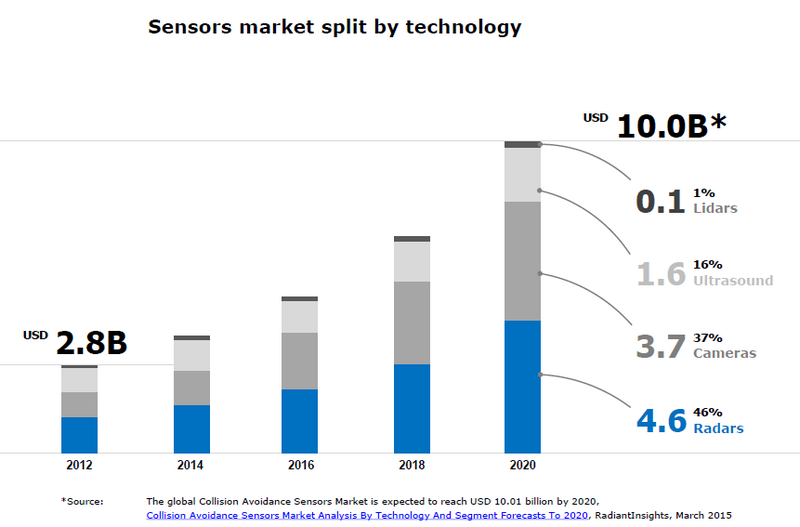
Оценки разнятся, но порядок одинаков. Баланс перекошен в пользу камер и радаров, которые на двоих занимают 85 процентов рынка в деньгах. Лидары остаются нишевым решением (только если не случится прорывов), а ультразвуковые датчики не могут выйти за рамки своей ниши и прорывов, опять же, не видно. Системы ночного видения теряются даже на фоне лидаров.
Теперь подробнее.
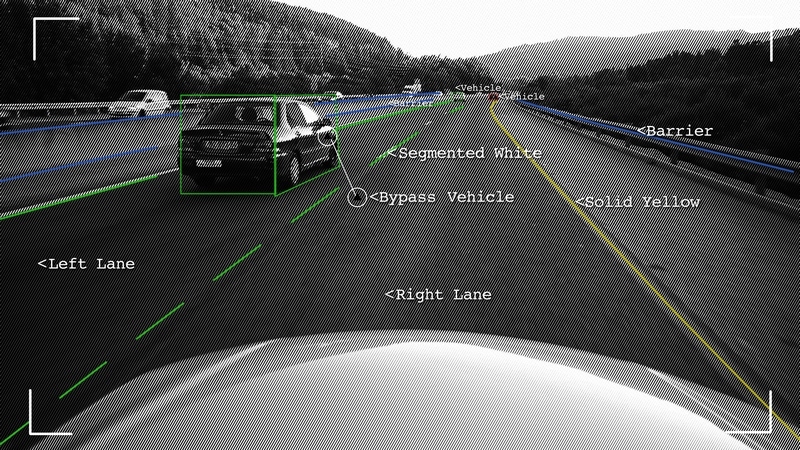
КАМЕРЫ
Работает так: получили картинку мира в видимом диапазоне, обработали (отдельные кадры и последовательность), распознали.
Плюсы:
- Только камеры могут распознавать дорожную разметку и знаки.
- У камер хорошее разрешение по углу, то есть камера хорошо «понимает» объекты, которые двигаются поперек движения автомобиля (переходящий дорогу пешеход).
- По картинке с камеры возможна прямая классификация объектов («собака»-«ребенок»-«взрослый»-«велосипед»-«машина»-«грузовик»).
- И, конечно, камеры доступны по цене — от нескольких сотен долларов для покупателя.
Минусы:
- У камер плохое разрешение по дальности, они с трудом понимают расстояние до препятствия или скорость сближения (стереокамеры отчасти решают проблему).
- Нет прямого измерения скорости объектов, ее можно понять по серии кадров, и все равно измерение нечеткое.
- Сильно влияние погодных и дорожных условия — пресловутый «белый фургон на фоне яркого неба» в недавней аварии.
- Обработка данных с камер занимает время: задержка тем больше, чем сложнее система камер.
Рынок вытоптан слонами от Intel и NVIDIA до Mobileye и Magna International. Стартапов очень много, порог входа низкий. Развитие технологии упирается в скорость и качество обработки данных, то есть в процессоры и алгоритмы. Кардинально увеличить скорость обработки не получается, а прорывные алгоритмы ничего пока не прорвали.Вывод:
Без камер на автомобиле всё равно не обойтись.

РАДАРЫ
Работает так: излучили на сверхвысокой частоте, послушали что вернулось, сразу узнали дистанцию до препятствий, их скорость и углы на них.
Плюсы:
- На работу радаров намного меньше влияют погодные условия, вообще не влияет цвет объектов и освещенность.
- Хорошая разрешающая способность по дальности и скорости, доступно прямое измерение дальности и скорости с хорошей точностью.
- Мгновенная (1/20–1/50 секунды) обработка данных, что особенно важно для высоких скоростей.
- Возможность легко накапливать и анализировать информацию в динамике за счет небольшого объема информации. По той же причине подходит для V2I/V2V
Минусы:
- Не дешевле, а часто и дороже камер. Дороже 1000 долларов за дальний радар.
- Плохое разрешение по углу (радару сложно понять движение поперек).
- Нет прямой возможности классифицировать препятствие или оценить его габариты.
- Сильная зависимость дальности от угла обзора. Если светим далеко и узким лучом, не видим помехи над дорогой и по сторонам. Светим широко — получаем небольшую дальность.
На рынке слоны, только с другими названиями — Bosch Global, Delphi, Smartmicro. Стартапов почти нет, порог входа очень высокий за счет дороговизны оборудования под разработку СВЧ. Методы обработки мало изменились за последние 50 лет, вложения в разработку и организацию производства компонентов (как антенно-фидерного тракта) измеряются сотнями миллионов евро. Доступные и качественные трансиверы, без которых вообще не сделать массовое решение, производят пяток компаний на весь мир. Радары плавно совершенствуются, но развитие занимает десятилетия.Вывод:
Сильные стороны радара — слабые стороны камеры и наоборот. Без радаров тоже не обойтись.
Не я придумал, а господин Маск:
»…That said, I don«t think you need LIDAR. I think you can do this all with passive optical and then with maybe one forward RADAR… if you are driving fast into rain or snow or dust. I think that completely solves it without the use of LIDAR. I«m not a big fan of LIDAR, I don«t think it makes sense in this context.»

ЛИДАРЫ
Лазерные дальномеры: посветили лазером, посмотрели, что вернулось, выдали массив точек с расстояниями до них.
Плюсы:
- Вундервафля, видит всё вокруг подробно и с высокой точностью. Кроме них так никто не умеет и никогда не будет.
Минусы:
- Сканирующие лидары видят один и тот же участок дороги всего два-три раза в секунду.
- Высокая стоимость, нет — СТОИМОСТЬ лидара.
- Еще лидары хрупкие.
- Короче, все остальное — минусы
На рынке есть крутые игроки — Velodyne LiDAR, Quanergy, Sick. Все решения сравнительно молодые, стартапов несколько штук, но сравнительно крупных. Действительно крупных игроков уровня Bosch с выручкой на automotive-направлении в десятки миллиардов на рынке нет и уже не будет. Со снижением стоимости лидара и отказом от движущихся частей катастрофически падают возможности и нужность лидара тоже. Все ждут решения за 250 баксов, но его что-то нет.
Просто и понятно: автомобильный рынок лидаров в сто раз меньше рынка радаров или камер, а у тех полно и других примененийВывод:
Пока не случилось революции, лидары останутся нишевым решением. Хорошо для прототипирования, никак для серийного автомобиля. Да и для прототипирования плохо: заточенная под лидары логика плохо адаптируется к другим датчикам.

УЛЬТРАЗВУК
Хорошо знакомые парктроники: излучили высокочастотный сигнал, дождались пока вернется, посчитали время.
Плюсы:
- Очень дешево, сотня-другая долларов за систему из нескольких датчиков
- Датчики легко объединяются.
- Технология отработана и понятна, можно экспериментировать даже дома на arduino.
Минусы:
- Дальность ограничена единицами метров.
- Нет возможности понять угол на объект или прямо измерить скорость.
- Низкая достоверность данных.
Ны рынке царствует китайский noname, поляна давно вытоптана, желающих вложиться в новые проекты немного. Стартапов мало, но есть например Toposens, который делает крутую вещь на ультразвуке, но что-то внезапно начинает делать радар тоже.
Вывод: Как только радары и лидары научатся хорошо отрабатывать ближние расстояния, ультразвук только для arduino и останется. Шутка:).

ИНФРАКРАСНЫЕ КАМЕРЫ
Как работает: посмотрели в инфракрасном диапазоне, проанализировали изображения на матрице.
Плюсы:
- Хорошо заметны горячие человеки и лесное зверье.
Минусы:
- Дорого, пара тысяч долларов только за фронтальную камеру
- Узкая сфера применения
- Ограничения по температурам использования.
Вывод:
Еще более нишевая история, чем лидары. Радары с лидарами выкинут их с автомобильного рынка уже совсем скоро, если еще не.
А теперь — сладкое. Подытожим:
- Ни один датчик или система датчиков не могут стать универсальными. Если говорить о роли единственного в low-end решениях — это камеры. Во вторую очередь — радары.
- Любая система ADAS и тем паче автопилот будут использовать систему из несколько датчиков. Это называется sensor fusion и в первую очередь будут совмещать камеры и радары. Подозреваю, ими и закончат.
- Чем больше разнородной информации хочется собрать, тем дороже это стоит (полбеды) и тем больше времени это занимает. Чем дольше обрабатываем, тем медленней мы должны ехать, чтобы это было безопасно. Отсюда черепашья езда большинства автопилотов и любовь к хорошей погоде.
И это еще не все. Скоро поговорим о проблемах реального мира, то есть инфраструктуры.
