[Перевод] Роботы начинают справляться с манипулированием произвольных объектов
Как новое поколение захватов с улучшенным трёхмерным восприятием и тактильными ощущениями обучается манипулировать объектами из большого спектра

Захват, созданный компанией Robotic Materials Inc., основанной автором статьи, выполняет задачу по манипуляции на соревновании по промышленной сборке на Всемирном саммите по робототехнике в Токио
Хотя роботы умеют готовить завтрак с 1961 года, манипуляция общего назначения (МОН) в реальном мире, возможно, является проблемой более сложной, чем автоматическое вождение автомобиля. Однако довольно сложно описать точно, почему это так. Если внимательно посмотреть на видео от 1961 года, видно, что двухпальцевый параллельный захват годится для выполнения довольно большого количества задач, и только отсутствие ощущений и встроенного в робота здравого смысла мешает ему выполнять подобные задачи в реальном мире. Недавняя статья в журнале Science напомнила нам о том, что даже такая богатая соприкосновениями задача, как сборка мебели, находится в пределах возможностей существующих промышленных роботов. Реальная проблема в огромном количестве возможных движений и манипуляций, и движения, которые требуются для приготовления бутерброда с маслом, не обязательно совпадают с движениями, необходимыми для сборки стула.
С промышленной точки зрения МОН может и не быть проблемой, которую стоит решать. Мы ведь можем создать машину для чего угодно — готовки эспрессо, мытья посуды, сборки пшеницы, массового производства кедов. Именно так большая часть робототехники и используется в современной промышленности. Даже роботы, которых продвигают, как «машины для совместной работы», в основном становятся частями более сложной машины на сборочной линии (и ей просто не требуется ограждение для безопасной работы). Попытки разработать МОН, интересную с научной точки зрения, измеряются по отношению к таким случаям использования. Из-за этого преимущества обобщённого решения задачи становятся не такими очевидными, и рискуют застрять в «аллее неэффективности», когда инвесторы и промышленность потеряют к ним интерес. Однако процессы производства и доставки включают в себя огромное количество различных этапов манипуляции. Даже если ценность каждого этапа стремиться к нулю, их общая ценность экономически значима.
Как мы узнаем, что решение задачи манипуляции будет достаточно обобщённым, чтобы раскрыть эту стоимость? Сообщество разработчиков робототехники предложило несколько вариантов соревнований, в которых необходимо либо решать различные задачи, либо манипулировать различными объектами. Это, например, такие соревнования, как RoboCup@Home, IROS и Amazon Picking Challenge. Хотя эти соревнования агитируют за обобщённые решения, пока ещё сложно придумать задачи, с которыми специализированные решения не справлялись бы лучше. К примеру, победившая в соревновании IROS команда из Кореи использовала робота Бакстер и систему самоклеющихся поролоновых кубиков для манипуляции такими предметами, как тарелки и ложки. Точно так же большую часть задач из Amazon Picking Challenge можно выполнить при помощи одного только вакуумного насоса. На самом же деле нам необходимо единое решение для манипуляций, хорошо справляющееся со всеми перечисленными задачами.
Другой взгляд на вещи был предложен на промышленном соревновании на Всемирном саммите по робототехнике в Токио, где предлагали приз в $130 000 команде, которая сумеет предоставить обобщаемое решение для нескольких промышленных задач по загрузке контейнера и сборке предметов, переключаться между которыми можно будет за один день. Командам сначала необходимо было доставать из корзин предметы с очень разными размерами (от гаек М3 до электромоторов и гибких приводных ремней), размещать их в контейнере, а потом собирать из них сложные структуры. Для такого соревнование необходимо решение по манипуляции, способное не только захватывать и манипулировать объектами, но и поддающееся несложному перепрограммированию в течение дня соревнований. В случае успешного создания таких роботов их можно было бы использовать, как помощников при сборке мебели, помощи при переезде или других задач по манипуляции, которые легко может понять человек, а современные роботы не могут.
Вакуумные насосы, захваты и мягкие роботы
Какие варианты для достижения МОН у нас есть? В индустриальной автоматизации доминируют три конкурирующие парадигмы: насосы, механические захваты и руки, а в последнее время ещё и мягкие роботы. Насосы находятся на переднем плане, поскольку чашечные присосы деформируются и принимают форму объекта, даже когда его расположение точно неизвестно. После этого можно высосать воздух, что делает чашу твёрдой и создаёт кольцеобразное ограничение на движение объекта. Это привлекательный вариант, поскольку один чашечный присос способен ухватить большое количество различных объектов. Однако присос не решает всех проблем — к примеру, когда предмет слишком тяжёлый, слишком пористый, когда для дальнейших манипуляций необходимы точные перемещения объекта или приложение к нему определённых воздействий.
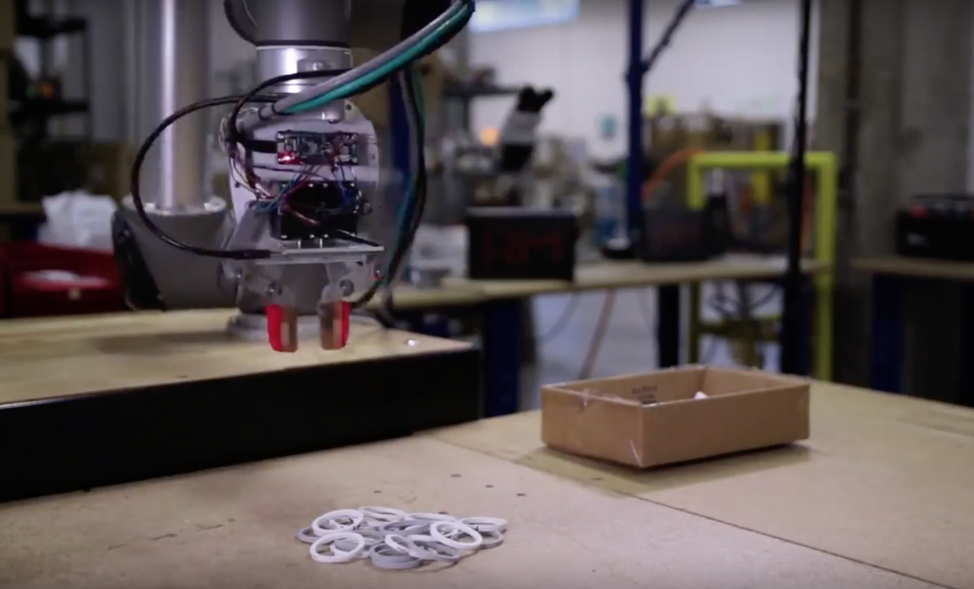
Объекты с отверстиями тяжело захватывать одним только присосом
Точное приложение сил можно применять при использовании механических захватов, которые чаще всего реализованы в виде параллельных захватов или двух четырёхзвенных механизмов. Трёхпальцевые решения используются гораздо реже, и хорошо себя показывают при необходимости захватов цилиндрических объектов сверху. Проблема жёстких захватов в том, что скорость захвата при соприкосновении с объектом должна быть нулевой, чтобы избежать передачи ненужных импульсов. В случае эластичных контактов импульс сохраняется, в результате чего небольшие объекты отскакивают от захвата с большой скоростью. Отскок можно уменьшить, применяя деформируемый захват для большей пластичности контакта, увеличивая точность восприятия, чтобы захват мог закрыться вовремя, или ограничивая возможные движения объекта.
В экстремальных случаях эти меры приводят к использованию полностью мягких захватов, деформируемость которых не даёт объекту отскакивать, а мягкость уменьшает необходимую точность восприятия. Успех захвата заключается в большой площади контакта для максимизации трения и уменьшения вращательных степеней свободы объекта. При захвате стержня квадратного сечения при помощи двухпальцевого захвата нам нужно так расположить его, чтобы пальцы оказались параллельными двум плоскостям стержня. Мягкому захвату не потребуется определять ориентацию стержня и планировать захват, поскольку он просто обхватит объект. Но деформируемость захватов, снижая требования к восприятию и планированию, усложняет контролируемое применение усилий. Позиция объекта в мягкой руке неизвестна, а её деформируемость не даёт приложить усилия контролируемым образом. При захвате с последующим сбрасыванием объекта это может и не составлять проблему, но сильно усложняет манипуляцию, при которой нужно поднять объект и правильно поместить его.
Хороших практических результатов можно достигнуть, комбинируя простой контроль положения и ограничивая максимальный крутящий момент моторов. Как и деформируемые мягкие роботизированные руки, захват с контролем по сопротивлению может подстроиться под объект, восполняя неточности восприятия.
Таким образом, идеальный захват должен становиться по необходимости жёстким или мягким, позволяя захватывать объекты с минимальным восприятием и планированием, устраняя неопределённости расположения объекта и давая возможность жёстких манипуляций. В то же время поверхность захвата должна сохранять непрерывный контакт с объектом. Этого можно достичь, комбинируя указанные выше техники. К примеру, мягкий захват может стать жёстким при помощи зернистого заклинивания, или механизм присоса можно дополнить обхватывающим захватом для обеспечения дополнительных ограничений. Механический захват можно дополнить присосом или электростатическими подушками для отключаемого прилипания. Человеческая рука потрясающе справляется с комбинированием этих свойств: комбинация твёрдых костей и мягких тканей позволяет варьировать жёсткость, она может охватывать объекты, сохраняя возможность точного контроля. Эти возможности реализуются мягкими подушками пальцев, трением кожи и способностью к прилипанию — как прилипает к пальцу маленький кусочек бумаги.
Захваты с контролем крутящего момента
Некоторые из легко достижимых возможностей позволяют нам комбинировать преимущества мягких и обычных роботов, создавая коммерчески привлекательные решения по МОН. Один из них — контроль сопротивления в применении к традиционным двухпальцевым захватам. Контролируя сопротивление, мы контролируем силу сопротивления внешним движениям, накладываемую окружающей средой. Хороших практических результатов можно достичь, комбинируя простой контроль расположения с ограничением максимального крутящего момента моторов. Ограничивая крутящий момент, жёсткий захват может стать сколь угодно деформируемым (в рамках точности датчиков крутящего момента). Как и его полностью деформируемый эквивалент, захват с контролем сопротивления может подстраиваться под объект, компенсируя неточность восприятия. В то же время такая схема может стать жёсткой для точного манипулирования. Контроль сопротивления вместе с восприятием положения пальцев является формой тактильного ощущения. Захват сможет определять наличие объектов в окружении, отслеживая положение и крутящий момент. Движения будут получаться мягкими, восполняющими неточность восприятия.

Вверху: захват клубники при помощи контроля сопротивления. Уменьшение максимально допустимого крутящего момента позволяет пальцам остановиться при контакте с препятствием и не раздавить ягоду.
Внизу: Захват твёрдого объекта с контролем сопротивления. Контроль крутящего момента позволяет пальцам двигаться до появления контакта. Зная положение каждого пальца, можно ввести контроль положения на уровне всей руки.
Захват с контролем крутящего момента может служить платформой для воплощения недавних результатов исследований мягких манипуляторов: дополняя кончики пальцев и ладонь присосом, мы комбинируем преимущества точного контроля положения и усилия с надёжностью присосов. Датчик крутящего момента в суставах пальцев можно дополнить тактильными датчиками, измеряющими давление, стратегически расположенными на захвате. Тактильные сенсоры ладони и кончиков могут помочь различать, препятствует ли движению пальцев постороннее препятствие, или же рука соприкоснулась с нужным объектом. Тактильные датчики также напрямую добавляют зрительные датчики, определяя момент контакта и улучшая оценку ориентации объекта и место, которым рука его захватила.
Современные достижения трёхмерного восприятия делают цель МОН близкой, как никогда. Трёхмерные датчики типа Intel RealSense способны ощущать присутствие объектов в 11 см от камеры с точностью, позволяющей захватывать даже такие мелкие предметы, как гайки М3, а комплексные решения уже доступны на рынке — например, компания Robotic Materials Inc., базирующаяся на исследованиях моей лаборатории, только что выпустила бета-версию своей руки. Совместная работа точного трёхмерного восприятия, контроля сопротивления для нежного взаимодействия с окружением и различных методов тактильного ощущения, позволяющих оценить успех захвата, позволяют реализовывать надёжную манипуляцию объектами в неточном окружении.
К примеру, недавно мы продемонстрировали мобильное наполнение контейнеров, в котором от робота требуется доставать объекты трёх различных типов (гайки М3, часть механизма и резиновый ремень) из корзин, расположение которых на столе известно лишь приблизительно. Несмотря на погрешность в 10 см, вносимую автономной перевозкой, перемещающейся по различным межевым точкам склада, робот смог обнаружить отдельные корзины и предметы, используя трёхмерное восприятие, встроенное в руку. Ограничение крутящего момента используется для аккуратного взаимодействия с содержимым корзин и минимизирует влияние возможных столкновений. Тактильное восприятие, использующее измерение крутящего момента, используется для оценки успешности захвата.
Несмотря на впечатляющие успехи трёхмерного восприятия, контроля сопротивления и тактильного восприятия в деле МОН, эти технологии противоречат преобладающей промышленной парадигме специализированных решений для манипуляторов. Любая форма восприятия требует времени и накладывает ограничения на скорость захвата, необходимые для ограничения энергии неожиданных ударов. Поэтому на переднем крае МОН будут находиться малые и средние предприятия, работающие с большим ассортиментом и малым количеством продуктов, а также крупные игроки, желающие дифференцировать свою продукцию, уменьшая цикл производства и увеличивая возможности кастомизации. В то же время мобильные роботы всё чаще встречаются на складах, в отелях и больницах. В подобных ситуациях определённые манипуляции вроде загрузки, разгрузки и обслуживания могут очень сильно увеличить ценность таких роботов, создавая экономические предпосылки, необходимые для решения задачи манипуляции общего назначения.
