[Перевод] Алгоритм Форчуна, подробности реализации
Последние несколько недель я работал над реализацией алгоритма Форчуна на C++. Этот алгоритм берёт множество 2D-точек и строит из них диаграмму Вороного. Если вы не знаете, что такое диаграмма Вороного, то взгляните на рисунок:
Для каждой входной точки, которая называется «местом» (site), нам нужно найти множество точек, которые ближе к этому месту, чем ко всем остальным. Такие множества точек образуют ячейки, которые показаны на изображении выше.
В алгоритме Форчуна примечательно то, что он строит такие диаграммы за время  (что оптимально для использующего сравнения алгоритма), где
(что оптимально для использующего сравнения алгоритма), где  — это количество мест.
— это количество мест.
Я пишу эту статью, потому что считаю реализацию этого алгоритма очень сложной задачей. На данный момент это самый сложный из алгоритмов, которые мне приходилось реализовывать. Поэтому я хочу поделиться теми проблемами, с которыми я столкнулся, и способами их решения.
Как обычно, код выложен на github, а все использованные мной справочные материалы перечислены в конце статьи.
Я не буду объяснять, как работает алгоритм, потому что с этим уже хорошо справились другие люди. Могу порекомендовать изучить эти две статьи: здесь и здесь. Вторая очень любопытна — автор написал интерактивное демо на Javascript, которое полезно для понимания работы алгоритма. Если вам нужен более формальный подход со всеми доказательствами, то рекомендую прочитать главу 7 книги Computational Geometry, 3rd edition.
Более того, я предпочитаю разбираться с подробностями реализации, которые задокументированы не так хорошо. И именно они делают реализацию алгоритма такой сложной. В особенности я сосредоточусь на использованных структурах данных.
Я только написал псевдокод алгоритма, чтобы вы получили понятие о его глобальной структуре:
добавляем событие места в очередь событий для каждого места
пока очередь событий не пуста
извлекаем верхнее событие
если событие является событием места
вставляем в линию побережья новую дугу
проверяем наличие новых событий окружностей
иначе
создаём в диаграмме вершину
удаляем из береговой линии стянутую дугу
удаляем недействительные события
проверяем наличие новых событий окружностей
Первая проблема, с которой я столкнулся — выбор способа хранения диаграммы Вороного.
Я решил использовать структуру данных, широко применяемую в вычислительной геометрии, которая называется двусвязным списком рёбер (doubly connected edge list, DCEL).
Мой класс VoronoiDiagram использует в качестве полей четыре контейнера:
class VoronoiDiagram
{
public:
// ...
private:
std::vector mSites;
std::vector mFaces;
std::list mVertices;
std::list mHalfEdges;
}
Я подробно расскажу о каждом из них.
Класс Site описывает входную точку. Каждое место имеет индекс, который полезен для занесения его в очередь, координаты и указатель на ячейку (face):
struct Site
{
std::size_t index;
Vector2 point;
Face* face;
};
Вершины ячейки представлены классом Vertex, у них есть только поле координат:
struct Vertex
{
Vector2 point;
};
Вот реализация полурёбер:
struct HalfEdge
{
Vertex* origin;
Vertex* destination;
HalfEdge* twin;
Face* incidentFace;
HalfEdge* prev;
HalfEdge* next;
};
Вы можете задаться вопросом — что такое полуребро? Ребро в диаграмме Вороного является общим для двух соседних ячеек. В структуре данных DCEL мы разделяем эти рёбра на два полуребра, по одному для каждой ячейки, и они связываются указателем twin. Более того, у полуребра есть исходная и конечная точки. Поле incidentFace указывает на грань, которой принадлежит полуребро. Ячейки в DCEL реализуются как циклический двусвязный список полурёбер, в котором соседние полурёбра соединены вместе. Поэтому поля prev и next указывают на предыдующие и следующие полурёбра в ячейке.
На рисунке ниже показаны все эти поля для красного полуребра:

Наконец, класс Face задаёт ячейку. Он просто содержит указатель на своё место и ещё один на одно из его полурёбер. Не важно, какое из полурёбер выбрано, потому что ячейка — это замкнутый полигон. Таким образом, мы получаем доступ ко всем полурёбрам при обходе циклического связанного списка.
struct Face
{
Site* site;
HalfEdge* outerComponent;
};
Стандартный способ реализации очереди событий — очередь с приоритетами. В процессе обработки событий места и окружностей нам может понадобиться удалить события окружностей из очереди, потому что они больше не являются действительными. Но большинство стандартных реализаций очереди с приоритетами не позволяют удалять элемент, не находящийся на вершине. В частности это относится и к std::priority_queue.
Эту проблему можно решить двумя способами. Первый, более простой — добавить к событиям флаг valid. Изначально valid имеет значение true. Тогда вместо удаления события окружности из очереди, мы можем просто присвоить его флагу значение false. Наконец, при обработке всех событий в основном цикле мы проверяем, равно ли значение флага valid события false, и если это так, то просто пропускаем его и обрабатываем следующее.
Второй способ, который применил я — не использовать std::priority_queue. Вместо неё я реализовал собственную очередь с приоритетами, которая поддерживает удаление любого содержащегося в ней элемента. Реализация такой очереди довольно проста. Я выбрал этот способ, потому что он делает код алгоритма чище.
Структура данных береговой линии — сложная часть алгоритма. В случае неверной реализации нет никаких гарантий, что алгоритм будет выполняться за . Ключ к получению такой временной сложности — использование самобалансирующегося дерева. Но это проще сказать, чем сделать!
В большинстве ресурсов, которые я изучал (две вышеупомянутые статьи и книга Computational Geometry), советуют реализовывать береговую линию как дерево, в котором внутренние узлы обозначают точки излома, а листья обозначают дуги. Но в них ничего не говорится о том, как сбалансировать дерево. Думаю, что такая модель не самая лучшая, и вот почему:
- в ней есть избыточная информация: мы знаем, что между двумя соседними дугами есть точка излома, поэтому необязательно представлять эти точки в виде узлов
- она неадекватна для самобалансировки: можно сбалансировать только поддерево, образованное точками излома. Мы и в самом деле не можем сбалансировать всё дерево целиком, потому что в противном случае дуги могут стать внутренними узлами и листьями точек излома. Написание алгоритма для балансировки только поддерева, образованного внутренними узлами, мне кажется кошмарной задачей.
Поэтому я решил представить береговую линию иначе. В моей реализации береговая линия тоже является деревом, но все узлы обозначают дуги. Такая модель не имеет ни одного из перечисленных недостатков.
Вот определение дуги Arc в моей реализации:
struct Arc
{
enum class Color{RED, BLACK};
// Hierarchy
Arc* parent;
Arc* left;
Arc* right;
// Diagram
VoronoiDiagram::Site* site;
VoronoiDiagram::HalfEdge* leftHalfEdge;
VoronoiDiagram::HalfEdge* rightHalfEdge;
Event* event;
// Optimizations
Arc* prev;
Arc* next;
// Only for balancing
Color color;
};
Первые три поля используются для структуры дерева. Поле leftHalfEdge указывает на полуребро, отрисованное крайней левой точкой дуги. А rightHalfEdge — на полуребро, отрисованное крайней правой точкой. Два указателя, prev и next используются для получения прямого доступа к предыдущей и следующей дуге береговой линии. Кроме того, они также позволяют обойти береговую линию как двусвязанный список. И наконец, у каждой дуги есть цвет, который используется для балансировки береговой линии.
Для балансировки береговой линии я решил воспользоваться красно-чёрной схемой. При написании кода я вдохновлялся книгой Introduction to Algorithms. В главе 13 описаны два интересных алгоритма, insertFixup и deleteFixup, которые балансируют дерево после вставки или удаления.
Однако я не могу использовать приведённый в книге метод insert, потому что для нахождения места вставки узла в нём используются ключи. В алгоритме Форчуна нет ключей, мы только знаем, что нужно вставлять дугу до или после другой в береговой линии. Чтобы реализовать это, я создал методы insertBefore и insertAfter:
void Beachline::insertBefore(Arc* x, Arc* y)
{
// Find the right place
if (isNil(x->left))
{
x->left = y;
y->parent = x;
}
else
{
x->prev->right = y;
y->parent = x->prev;
}
// Set the pointers
y->prev = x->prev;
if (!isNil(y->prev))
y->prev->next = y;
y->next = x;
x->prev = y;
// Balance the tree
insertFixup(y);
}
Вставка y перед x выполняется в три этапа:
- Находим место для вставки нового узла. Для этого я воспользовался следующим наблюдением: левый дочерний элемент
xили правый дочерний элементx->prevравенNil, и тот из них, который равенNilнаходится передxи послеx->prev. - Внутри береговой линии мы сохраняем структуру двусвязного списка, поэтому мы должны соответствующим образом обновлять указатели
prevиnextэлементовx->prev,yиx. - Наконец, мы просто вызываем для балансировки дерева метод
insertFixup, описанный в книге.
insertAfter реализуется аналогично.
Взятый из книги метод удаления можно реализовать без изменений.
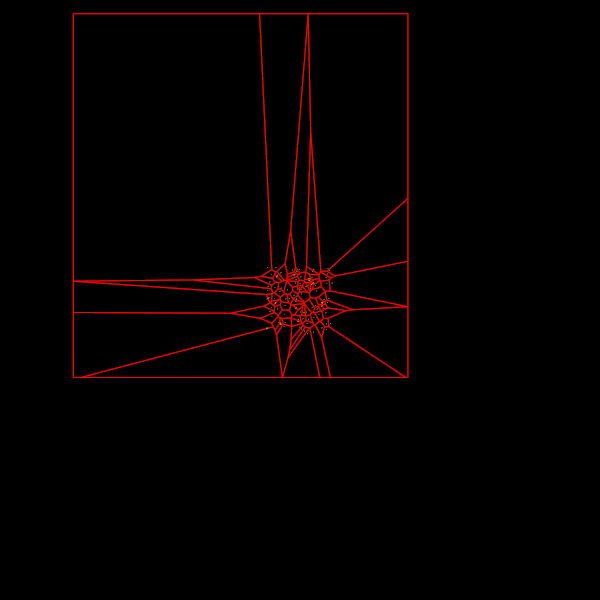
Вот выходные данные описанного выше алгоритма Форчуна:
Возникает небольшая проблема с некоторыми рёбрами ячеек на границе изображения: они не отрисовываются, потому что они бесконечны.
Хуже того — ячейка может и не быть одним фрагментом. Например, если мы возьмём три точки, находящиеся на одной прямой, то у средней точки будет два бесконечных полуребра, не связанных вместе. Это не очень нас устраивает, потому что мы не сможем получить доступ к одному из полурёбер, ведь ячейка является связанным списком рёбер.
Чтобы решить эти проблемы, мы ограничим диаграмму. Под этим я подразумеваю то, что мы ограничим каждую ячейку диаграммы, чтобы в них больше не было бесконечных рёбер и каждая ячейка являлась замкнутым полигоном.
К счастью, алгоритм Форчуна позволяет нам быстро найти бесконечные рёбра: они соответствуют полурёбрам, всё ещё находящимся в береговой линии к концу работы алгоритма.
Мой алгоритм ограничения получает в качестве входных данных прямоугольник (box) и состоит из трёх этапов:
- Он обеспечивает размещение каждой вершины диаграммы внутри прямоугольника.
- Отсекает каждое бесконечное ребро.
- Замыкает ячейки.
Этап 1 тривиален — нам просто нужно расширить прямоугольник, если он не содержит вершину.
Этап 2 тоже довольно прост — он состоит из вычисления пересечений между лучами и прямоугольником.
Этап 3 также не очень сложен, только требует внимательности. Я выполняю его в два этапа. Сначала я добавляю точки углов прямоугольника к ячейкам, в вершинах которых они должны быть. Затем я делаю так, чтобы все вершины ячейки были соединены полурёбрами.
Рекомендую изучить код и задать вопросы, если вам нужны подробности об этой части.
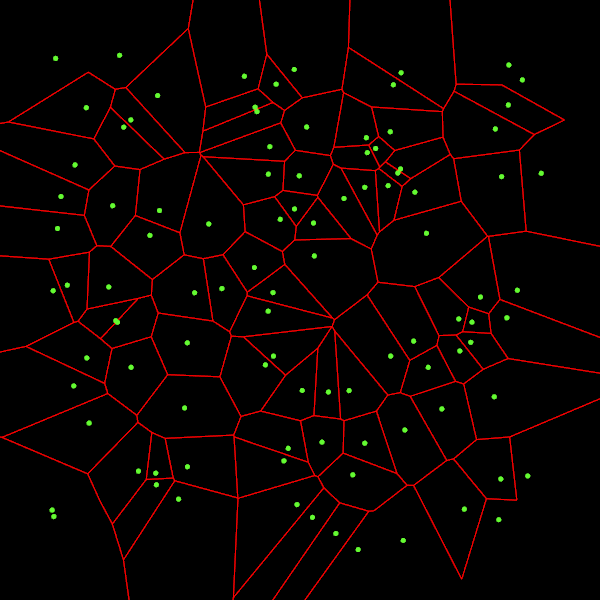
Вот выходная диаграмма ограничивающего алгоритма:
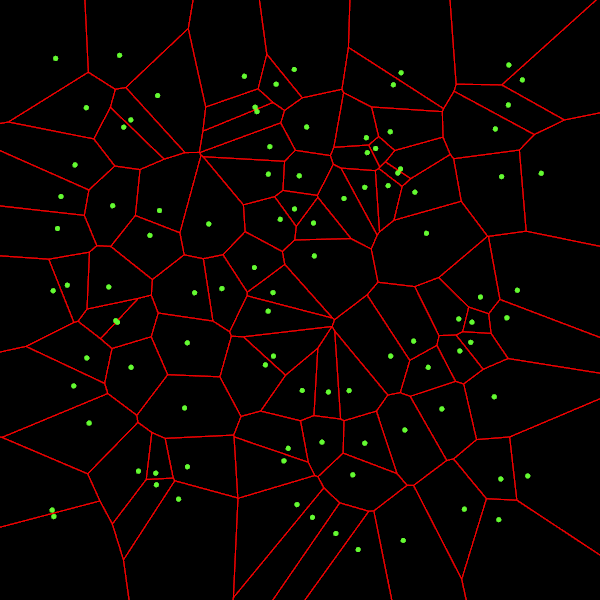
Теперь мы видим, что все рёбра отрисовываются. И если уменьшить масштаб, то можно убедиться, что все ячейки замкнуты:
Отлично! Но первое изображение из начала статьи лучше, правда?
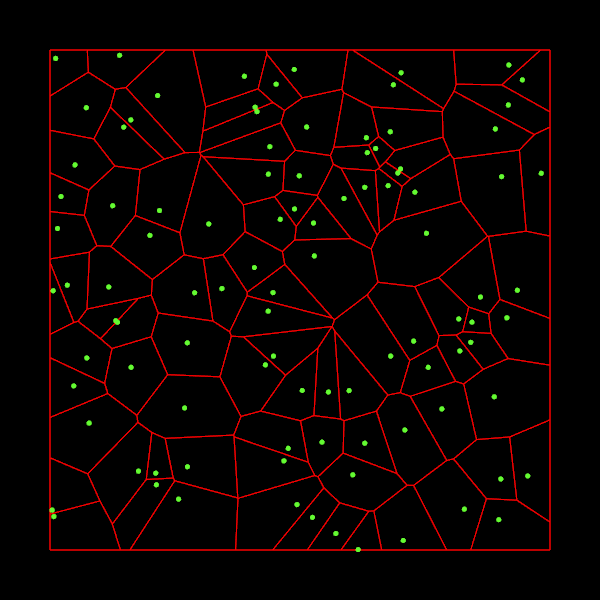
Во многих случаях применения полезно иметь пересечение между диаграммой Вороного и прямоугольником, как и показано на первом изображении.
Хорошо то, что после ограничения диаграммы сделать это гораздо проще. Плохо то, что хоть алгоритм и не очень сложен, нам нужно быть внимательными.
Идея заключается в следующем: мы обходим её полурёбра каждой ячейки и проверяем пересечение между полуребром и прямоугольником. Возможны пять случаев:
- Полуребро полностью находится внутри прямоугольника: такое полуребро мы сохраняем
- Полуребро полностью находится снаружи прямоугольника: такое полуребро мы отбрасываем
- Полуребро выходит наружу прямоугольника: мы усекаем полуребро и сохраняем его как последнее полуребро, выходившее наружу.
- Полуребро входит внутрь прямоугольника: мы усекаем полуребро, чтобы связать его с последним полуребром, выходившим наружу (мы сохраняем его в случае 3 или 5)
- Полуребро пересекает прямоугольник дважды: мы усекаем полуребро и добавляем полурёбра, чтобы связать ег с последним полуребром, выходившим наружу, а затем сохраняем его как новое последнее полуребро, выходившее наружу.
Да, получилось много случаев. Я создал картинку, чтобы все их показать:

Оранжевый полигон — это исходная ячейка, а красный — усечённая ячейка. Усечённые полурёбра обозначены красным. Зелёные рёбра добавлены, чтобы связать полурёбра, входящие в прямоугольник, с полурёбрами, выходящими наружу.
Применив этот алгоритм к ограниченной диаграмме, мы получаем ожидаемый результат:
Статья оказалась довольно длинной. И я уверен, что многие аспекты до сих пор вам непонятны. Тем не менее, надеюсь, она будет вам полезной. Изучите код, чтобы разобраться в подробностях.
Чтобы подвести итог и убедиться, что мы не потратили время зря, я измерил на своём (дешёвом) ноутбуке время вычисления диаграммы Вороного для разного количества мест:
 : 2 мс
: 2 мс : 33 мс
: 33 мс : 450 мс
: 450 мс : 6600 мс
: 6600 мс
Мне не с чем сравнить эти показатели, но кажется, что это невероятно быстро!
