[Из песочницы] Мечта летать с электротехническим уклоном
Эта статья написана для обобщения моего опыта по самостоятельному изготовлению силовой установки для электропарамотора, а собственно: электродвигателя, контроллера, батареи, и прочего навесного оборудования.

Предыстория
Как и большинство, меня с детства интересовала тематика полета, но так получилось что реальными полетами в воздушном пространстве, а не на симуляторе или радиоуправляемой модели я занялся не так давно, в 2014 году. Как и многие я выбрал параплан, как наиболее демократичный вид летательного аппарата.
На начальном этапе безмоторных полетов, когда дорога каждая минута, проведенная в воздухе, часто задумываешься о преимуществах моторного полета, но тут же видишь и недостатки — повышенный шум и вибрации примитивного двухтактного двигателя, запах топлива при перевозке и хранении установки. А так как у меня был успешный опыт самостоятельной электрификации велосипеда, было решено делать электроустановку.
После обдумывания различных конструкций, я остановился на реализованной многими схеме безредукторного привода воздушного винта электродвигателем большого диаметра, но малой толщины.

Плоский как блин электродвигатель дает приемлемый крутящий момент при небольшой массе, габаритах, и сложности конструкции. Большей эффективности можно достичь применив малогабаритный высокооборотный электродвигатель с редуктором (в этом я убедился на своем электровелосипеде), но сложность изготовления такого редуктора, и главное его немалый шум заставили отказаться от этой идеи.
Не мудрствуя лукаво, взяв за основу картинки и эскизы известного электромотора HPD10 из сети, я за несколько дней нарисовал свой мотор в Солиде
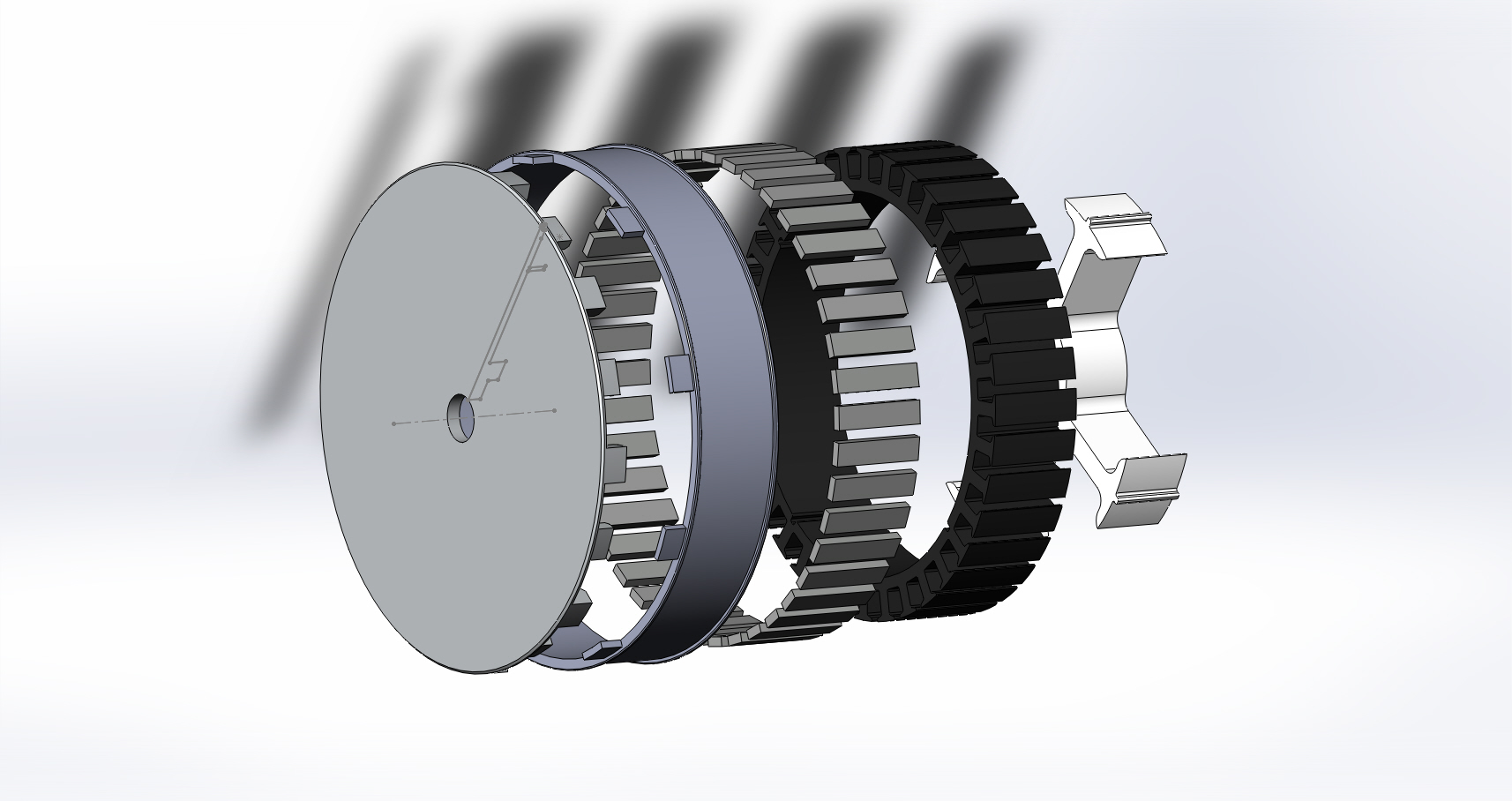
От прародителя без изменений остался только профиль пластин статора, который как мне кажется немецкие конструкторы взяли без изменений с безызвестного велосипедного мотор-колеса.

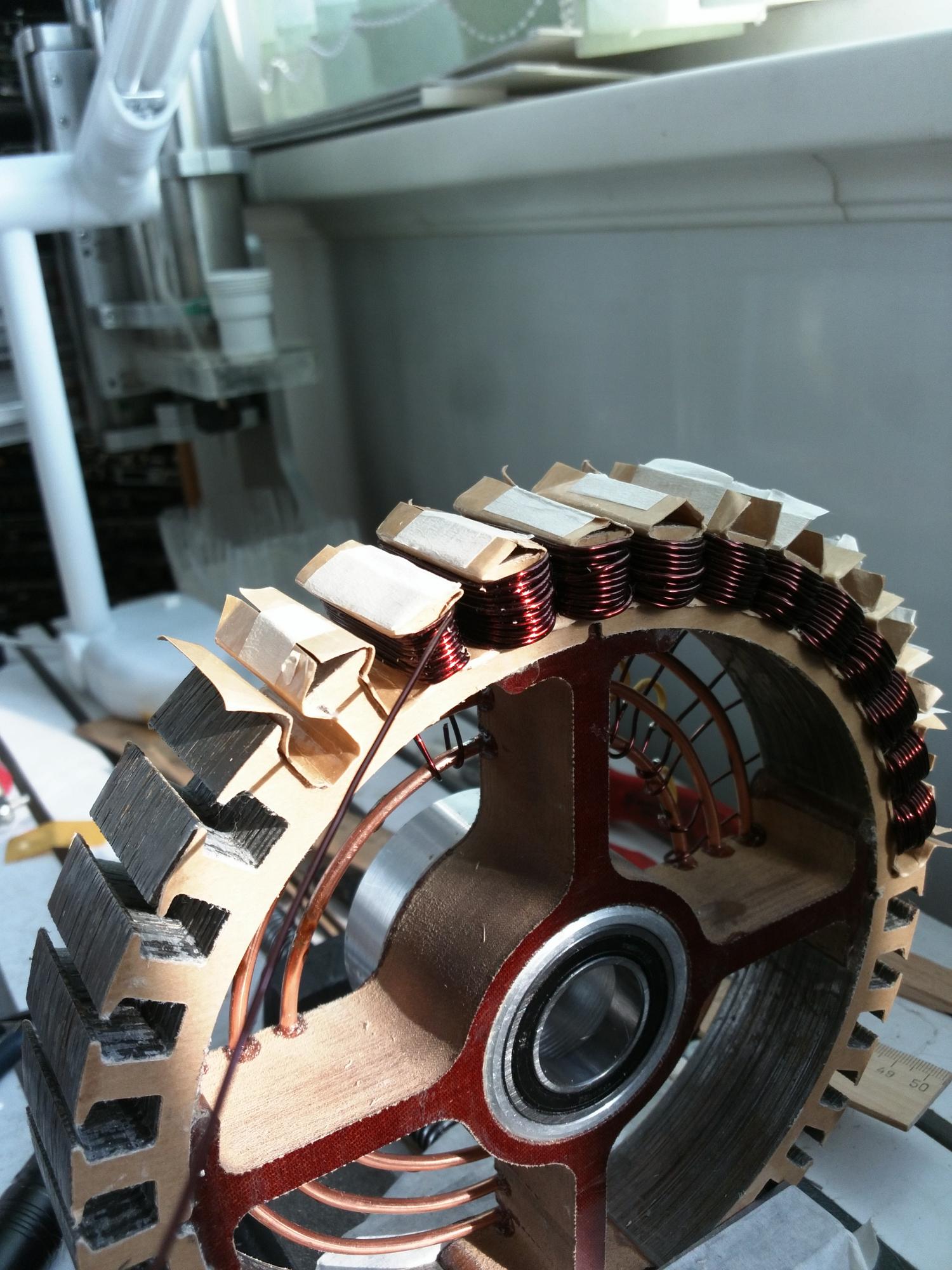
Самая ответственная деталь, магнитопровод статора должен быть изготовлен из набора пластин специальной анизотропной стали толщиной не более 0,35 мм. После долгих поисков, в Питере нашлась фирма готовая выполнить мой небольшой заказ.

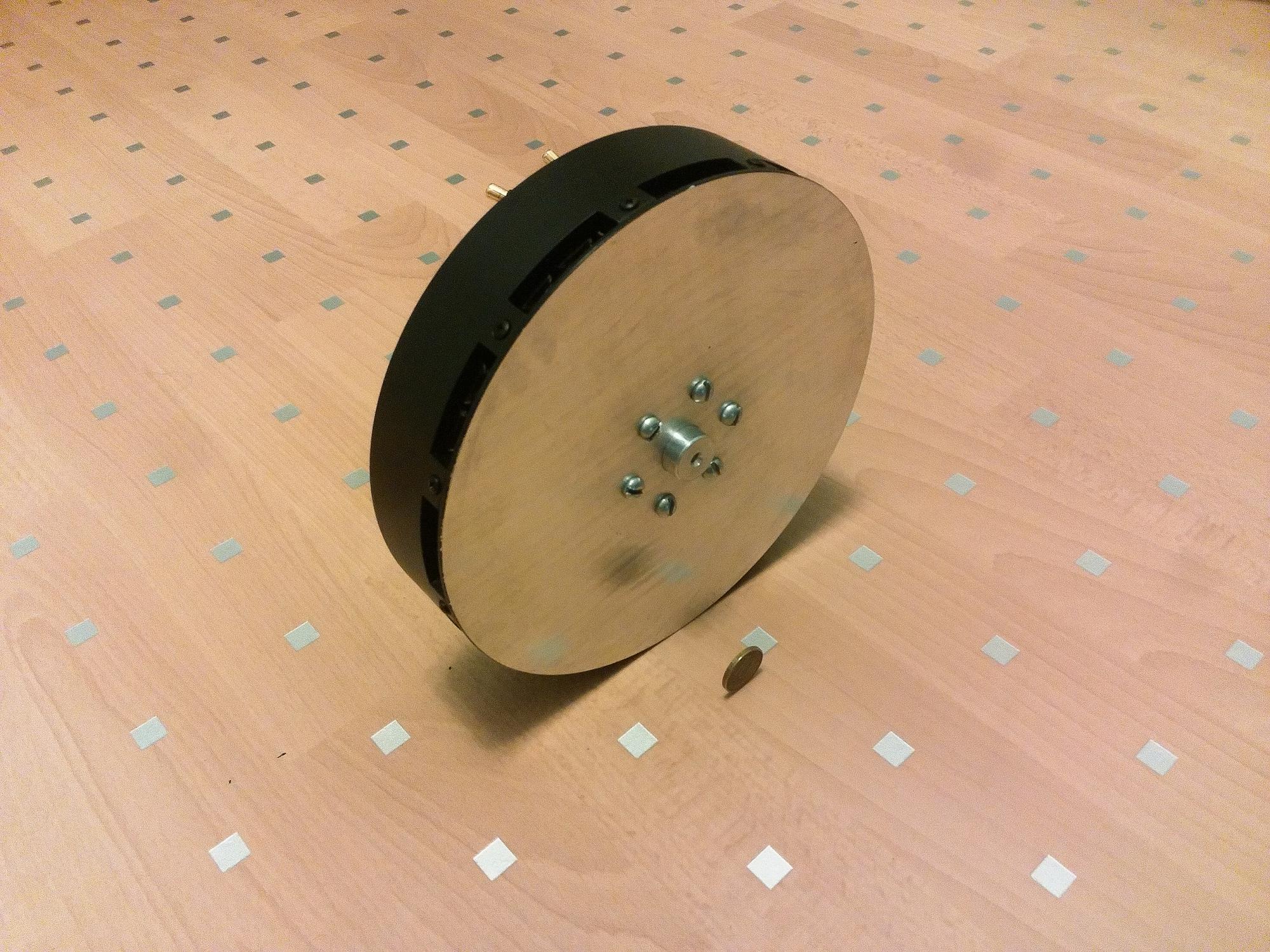
Кольцо ротора выполнено из найденной в металлоломе подходящей трубы

Диск отфрезерован из пластины д16т, ступица из толстого текстолита.


Окончательная намотка, самая занудная работа.
Готовый промежуточный образец, мощность 12кВт, максимальное напряжение 100 в.
На этапе расчета намотки мотора я увеличил максимальное напряжение, по сравнению с прототипом в два раза, до 100в. В тот момент я не думал о подводных камнях этого решения, главный плюс я видел в двукратном снижении тока, отсюда последовательное соединение относительно низкотоковых батарей, соединительные провода и разъемы меньших сечений.
Реальность оказалась менее радужной, доступные контроллеры на тот момент были с меньшим максимальным напряжением или током, часто не умели работать в безсенсорном режиме, либо стоили неприлично дорого.
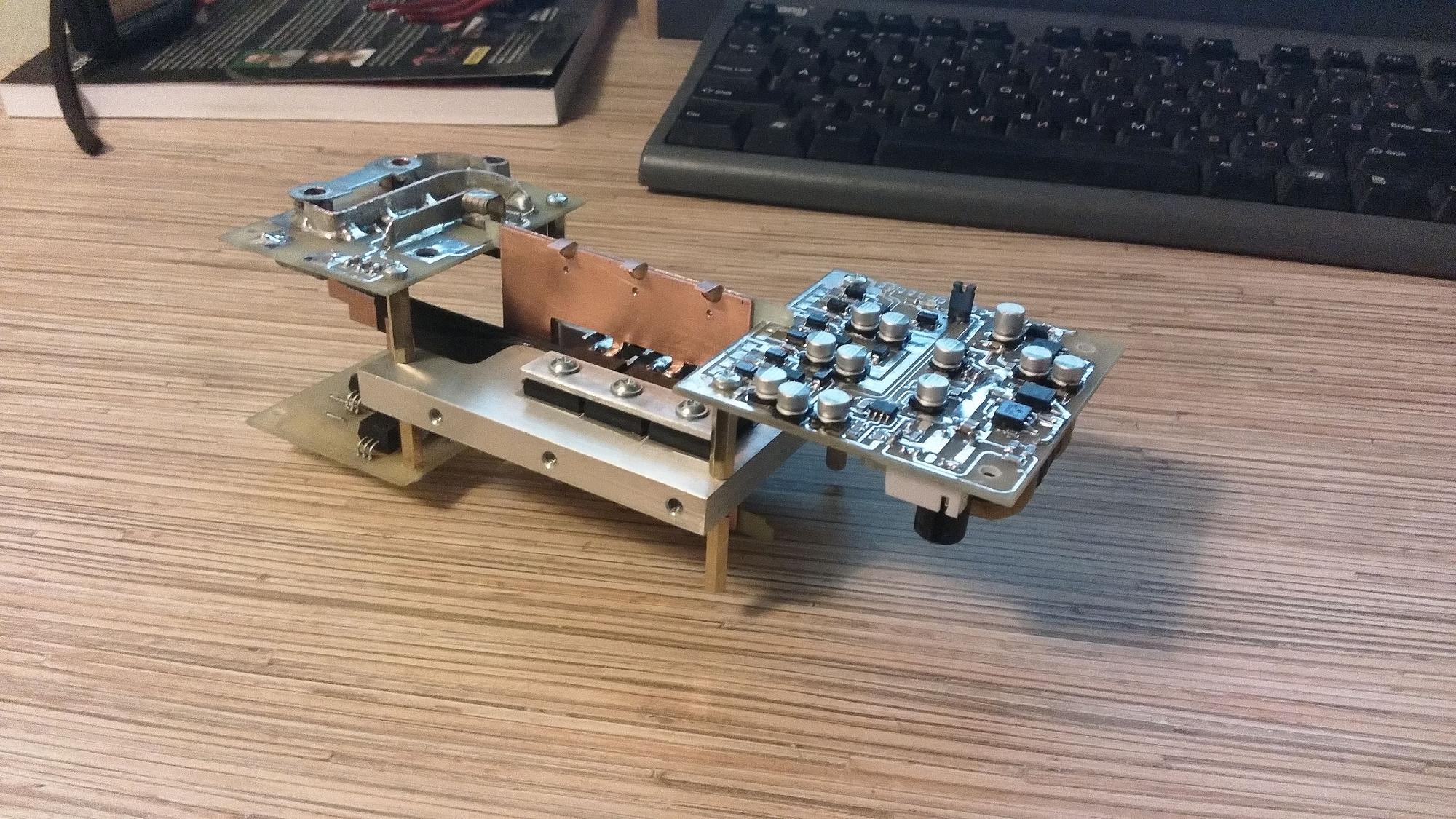
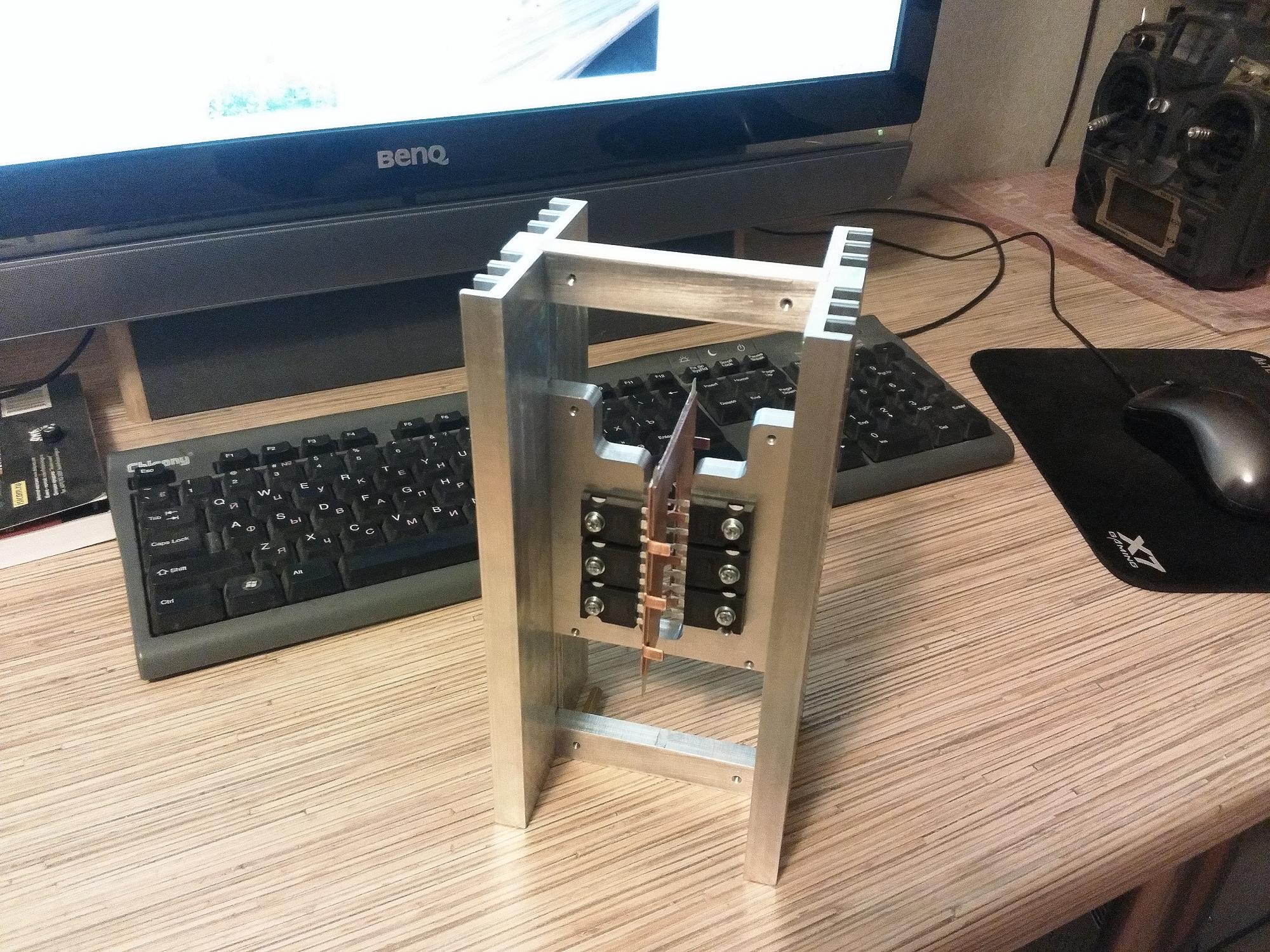
Ну что ж, подумав я решил сделать контроллер самостоятельно. До этого я делал только простенький BLDC контроллер на AVR, с прошивкой надерганой из частей апноутов. Поэтому трезво оценив свои силы и время, я остановился на полуоткрытом проекте векторного контроллера Lebowski, автора с endless-sphere.com
Автор рассылает прошитые dsPIC30, остальное вы должны сделать сами. Масштабируя рекомендованные схемы выходных каскадов, я получил то что мне было нужно, затратив небольшие деньги, и спалив на отладке только один комплект силовых транзисторов. Максимальный фазный ток контроллера 200 А, напряжение 150в.

Обратная сторона проекта без исходников, невозможность модернизации прошивки под себя, необходимость покупки нового прошитого контроллера если спалите имеющийся. Грабли с напряжением 100в ударили и здесь, ограничив выбор силовых транзисторов.
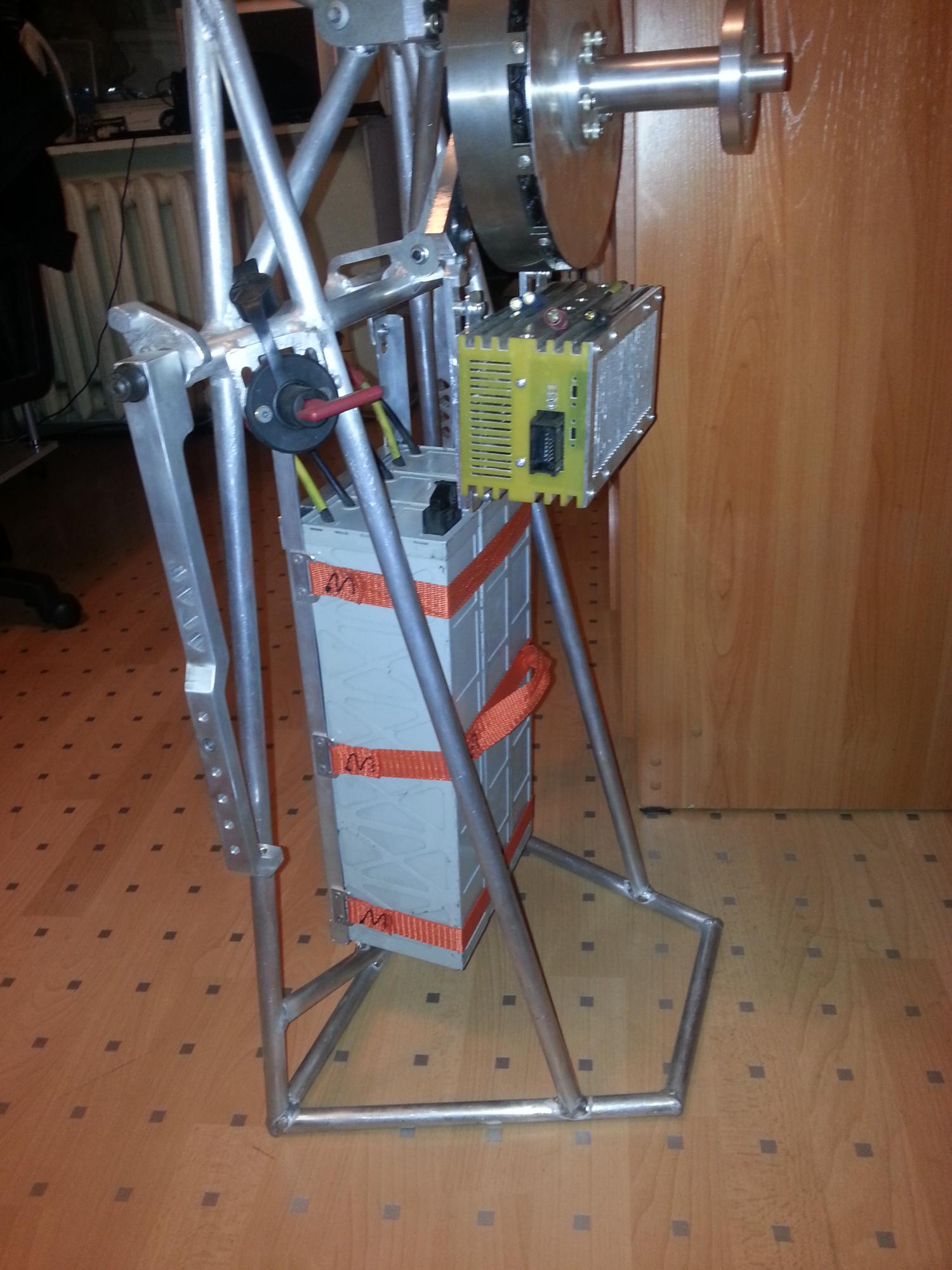
После мотора и контроллера, изготовление батареи казалось легкой прогулкой, но свои проблемы нашлись и тут. Купив 24 ячейки LI-PO IMP3201057P22A я собрал из них три батареи по 8S, с длительными токами 200А и кратковременными 400А.



Все хорошо, батареи мощные, почти не греются на 120 амперах, но вес… Собранная на кронштейне батарея получилась весом почти 15 кг, печально. В итоге вся установка в сборе получалась весом 32 кг, тяжелее чем многие бензинки. Это меня не устраивало вообще. Решено — батареи проданы, делаем новые батареи.
Нужно было сделать батарею с весом в два раза меньшим, и временем полета минут на 15. Остановился на ячейках 18650 inr18650–25r, которые заказал из Нидерландов и благополучно получил. Корпуса сделал максимально легкими, но прочными, ячейки соединил пайкой, посчитав что сварка кустарным аппаратом принесет больше вреда, чем продуманная пайка.
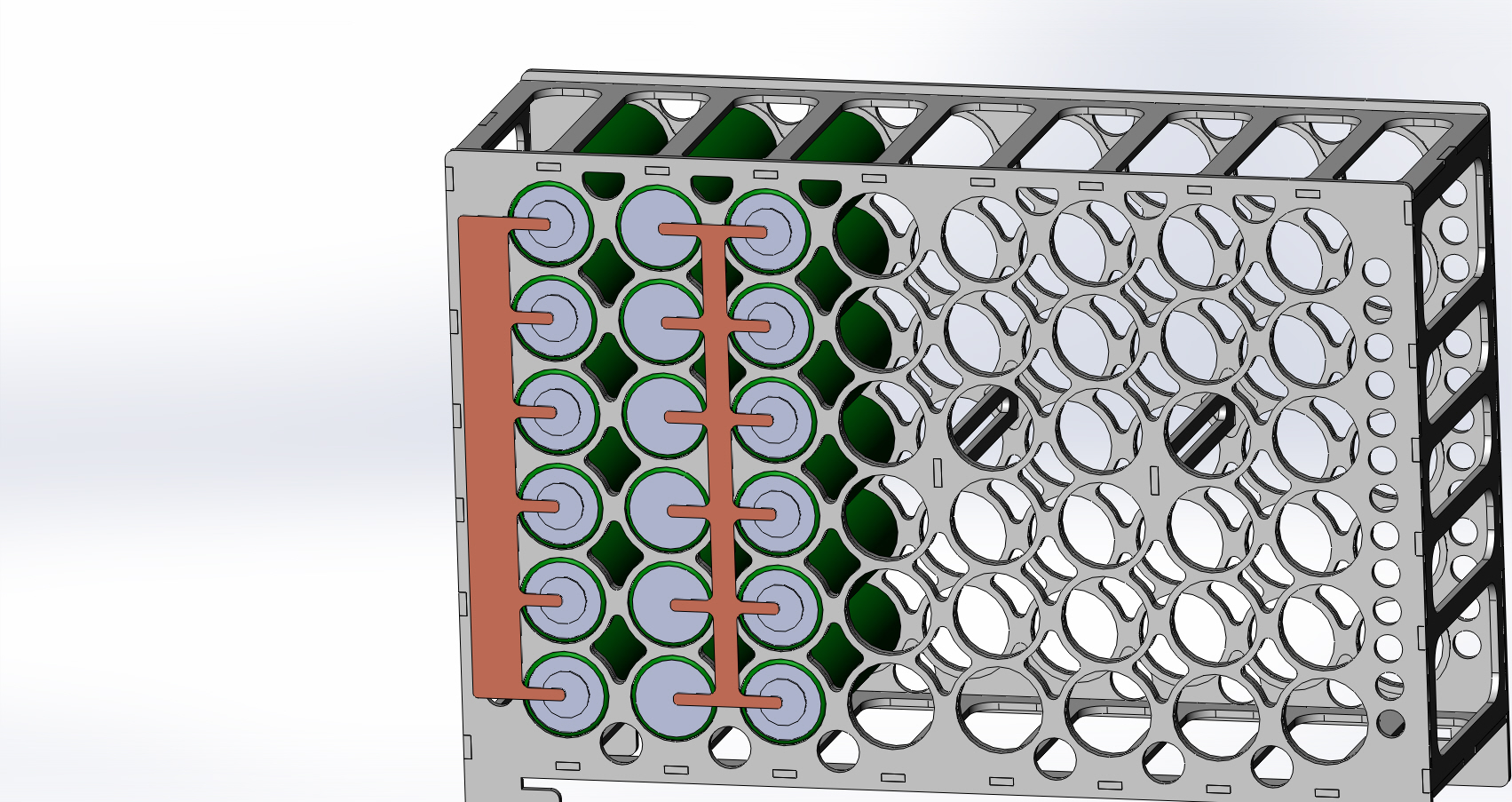

В итоге получил три батареи конфигурации 8S6P с максимальным продолжительным током 120А, емкостью 15Ач. Снятие максимально допустимых токов возможно благодаря хорошей продувке элементов установленных с воздушными зазорами в потоке от винта. Радует минимальный разброс характеристик, как никак Samsung. Итоговый вес сборки на кронштейне 7800 грамм, почти уложился в запланированный.

Остальное было делом техники, сварил легкую раму, фрезернул воздушный винт. Итоговая масса установки 25 кг, диаметр воздушного винта 1,25 м.


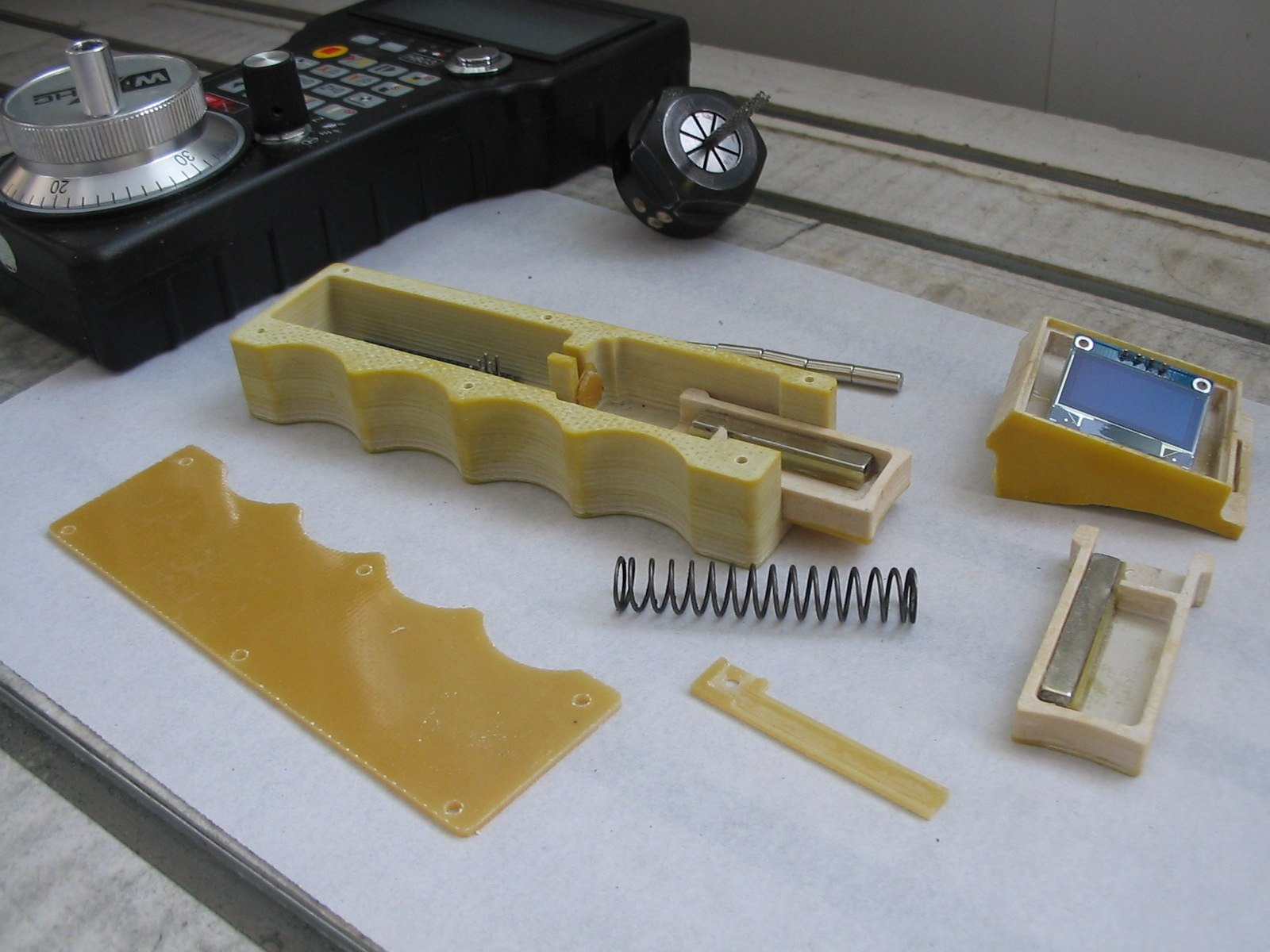
Ах да, в качестве вишенки на торте сделал РУД со связью по CAN, так показалось безопаснее и интереснее, благо контроллер двигателя это позволяет.
В конце октября сделал пару разрядок батареи на земле, затем пробный полет. Желаемые характеристики в целом достигнуты, к следующему летному сезону планирую устранить некоторые мелочи и тогда облетаю полностью, сейчас летной погоды нет.
Как таковая ранцевая электроустановка не более чем игрушка по сравнению с бензиновыми моделями, меньшая тяга, а главное время моторного полета при приемлемом весе, лишают ее преимуществ. Однако все изменится если встроить силовую часть в подвесную систему для свободного безмоторного полета, установить складной воздушный винт без ограждения, уложившись при этом в 20 кг по массе.
Этим путем пошли многие конструкторы, здесь есть свои сложности, воздушный винт без ограждения с вынесенным складным воздушным винтом требует регулировки и контроля наклона оси вращения. Иначе возможны неприятные осложнения при старте или в полете. Некоторые наработки есть и у меня, но пока не решил стоит ли двигаться с ними дальше.


Проект занял два года неспешной деятельности в свободное время, благодаря ему я освоил ЧПУ и токарную обработку, аргоновую сварку, обновил свои знания в электроприводе, силовой электронике и еще много где. Потраченного времени и денег не жалко, я получил массу творческого удовольствия.

Что же касается самих полетов, за два года я подтянул свои навыки свободного пилота, и моторный полет теперь особо не прельщает, разве только для разнообразия. Все-таки свободный маршрутный полет это нечто особенное, особенно когда он удачен. В эти минуты, а теперь уже и часы, чувства достигают высшей концентрации, разум обрабатывает массу информации получаемой в реальном времени, опыт удерживает от неразумных действий, а воля заставляет двигаться к новым открытиям этого прекрасного воздушного пространства.

Всем безопасных полетов!
