Linux Foundation представил Dronecode, открытую платформу для дронов
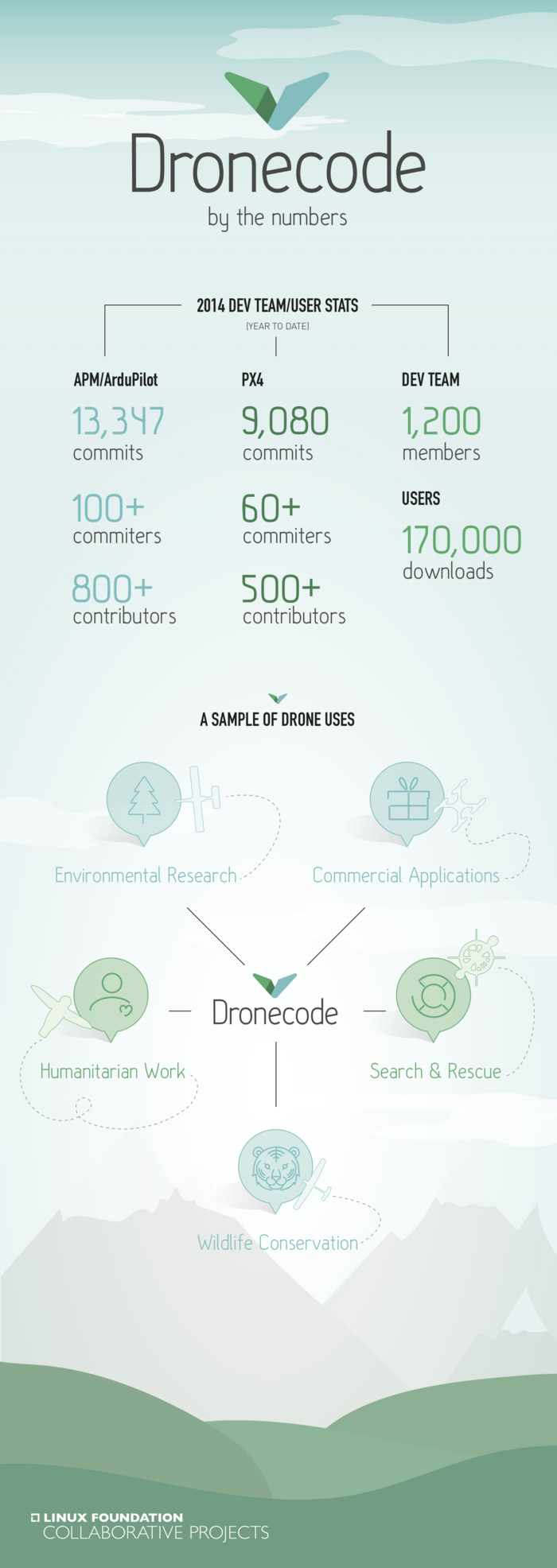
Некоммерческая организация Linux Foundation, курирующая широкий спектр работ, связанных с развитием Linux, представила новый проект Dronecode, в рамках которого будет развиваться свободная платформа для создания автономных беспилотных летательных аппаратов. Создаваемые с использованием Dronecode дроны смогут использовать автопилот для управления полётом, применять средства планирования миссий, самостоятельно адаптироваться к изменяющейся обстановке (например, облетать препятствия), выполнять функции поиска наземных объектов, отслеживать перемещение объектов. Главой управляющего совета, курирующего разработку проекта, назначен Эндрю Триджелл (Andrew Tridgell), основатель проектов samba и rsync, также являющийся одним из лидеров проекта ArduPilot. Сообщается, что в настоящее время над проектом уже работает более 1200 разработчиков, так как в Dronecode задействованы уже существующие открытые проекты и к его работе подключились многие сообщества и компании, работающие в области автоматизации управления, такие как 3DRobotics, YUNEEC, Baidu, Intel, Box, SkyWard, Qualcomm, Virtual Robotix, Drone Deploy, jDrones, iUAS и Squadrone System. Основой платформы послужил свободный программный стек APM, ранее развиваемый под покровительством компанией 3D Robotics. Переход проекта под крыло некоммерческой организации позволит избавиться от привязки проекта к одному производителю и привлечь к разработке другие компании. Linux Foundation обеспечит работу независимой площадки для совместного сотрудничества компаний и разработчиков, заинтересованных в развитии средств управления дронами.
В состав платформы входят два хорошо зарекомендовавших себя свободных проекта, уже применяемых при производстве дронов:
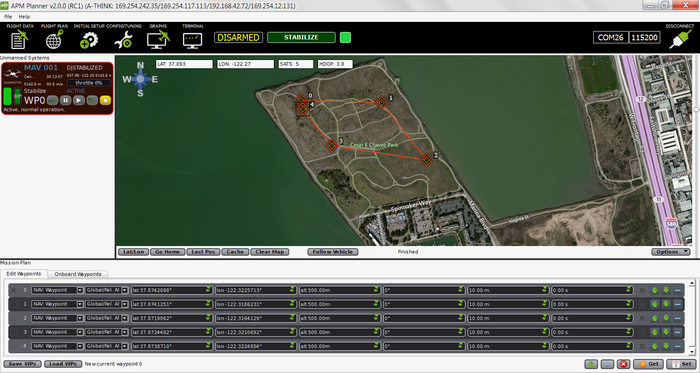
APM/ArduPilot — открытая платформа для беспилотных летательных аппаратов, способная управлять автономными мультикоптерами, самолётами, вертолётами и планетоходами. ArduPilot адаптирован для многих аппаратных платформ и поддерживает интеграцию с различными программными продуктами, в том числе с автопилотами APM и Pixhawk/PX4, а также с прошивками ArduCopter, ArduPlane и ArduRover. Для наглядного задания полётного плана, настройки/калибровки автопилота и контроля за ходом полёта предлагается интерфейс APM Planner, поддерживающий работу в Windows, OS X и Linux. Для управления полётом также можно использовать мобильное приложение DroidPlanner. Для организации связи наземных станций управления с летательными аппаратами применяется свободная библиотека с реализацией протокола MAVlink. PX4 — независимый открытый проект, развивающий программно-аппаратный комплекс для создания автопилотов. 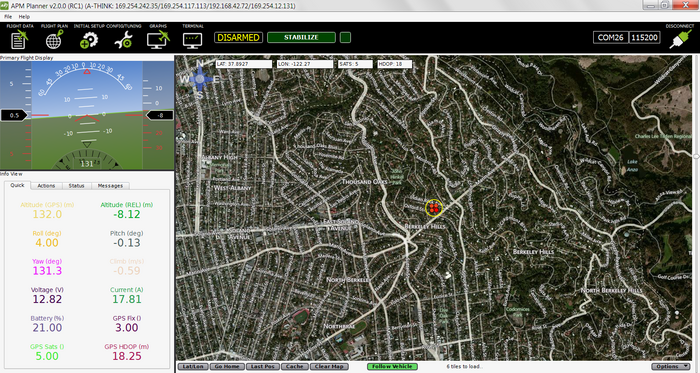
© OpenNet
