Исследователи разрабатывают способ тренировки роботов с помощью подталкивания
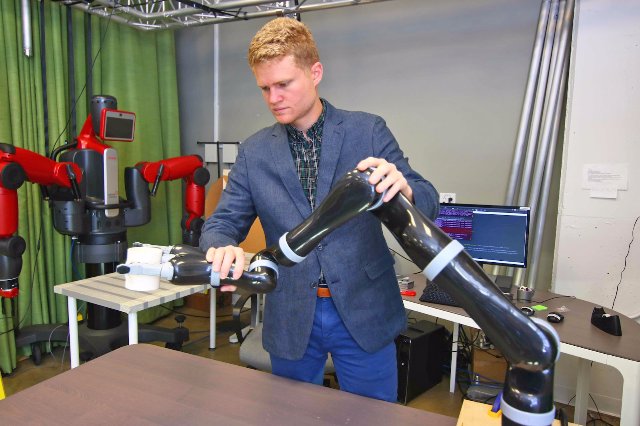
Исследователи из Университета Райса разработали способ тренировки роботов с небольшим толчком. Их метод использует алгоритмы, позволяющие роботам не только реагировать на прикосновение человека в данный момент, но и изменять их траекторию на основе этого физического ввода. «Здесь у робота есть план или желаемая траектория, которая описывает, как робот думает, чтобы выполнить эту задачу», — сказал аспирант Дилан Лоузи о проекте. «Мы ввели алгоритм реального времени, который изменил или исказил будущую траекторию робота».
Как правило, когда роботы запрограммированы на реагирование на физический контакт с человеком, они обычно делают это только в тот момент и вскоре после этого возвращаются к своей первоначальной траектории. Но с алгоритмами команды Rice их роботы смогли взять этот вход и использовать его для корректировки своих траекторий в реальном времени. «Перепланируя желаемую траекторию робота после каждого нового наблюдения, робот смог генерировать поведение, соответствующее предпочтениям человека», — сказал Лоузи.
Исследователи показывают, что, когда робот находился в типичном режиме, люди могли временно регулировать движения робота, а изменение пути каким-либо реальным способом постоянно регулировалось. Но когда он был помещен в режим обучения, одна настройка могла бы установить робота на новый, более желательный путь. «Смещение парадигмы в этой работе заключается в том, что вместо того, чтобы рассматривать человека как случайное нарушение, робот должен относиться к человеку как к разумному существу, у которого есть причина для взаимодействия», — сказал Лоузи в своем заявлении. «Робот не должен просто пытаться уйти с пути. Он должен узнать, что происходит, и сделать свою работу лучше».
