Самодельный 3D принтер на SCARA механике, v3
Видео работы v3 на скоротях 100+ mm/sec.
Предыдущие версии v1 и v2
Детали о предыдущем принтере можно почитать тут.
Предыдущая механика в OpenScad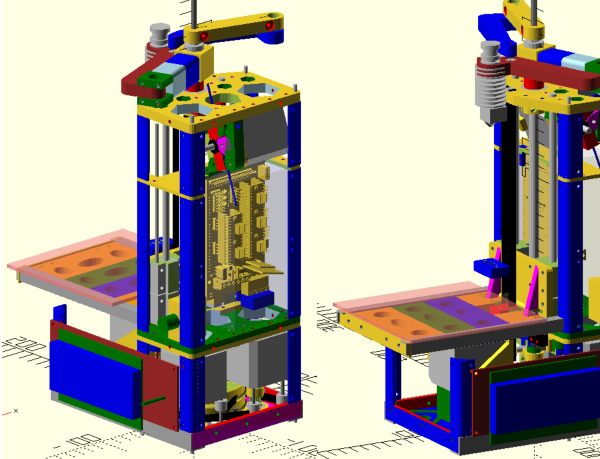
Что было не очень при такой механике:
- передача вращения на длину 30 см через шпильку m5 и алюминиевую трубку ID:6 OD:8 давало ошибки из за небольшого скручивания, на конце 30 см доходило до 0.5 градусов — исправимо
- малая жесткость рычагов — исправимо
- дорогая математика — даже оптимизированная не могла просчитываться (на Mega) быстрее чем 50 мм/сек
- Z висящая платформа — 2 подшипника на каждую направляющую решили проблему v1, но жесткость меня не устраивала
V3
v2 версия оказалась фейлом — я даже допускал мысль забросить это направление и собрать обычную простую механику, но желание сделать что то необычное не давало мне покоя.
Собственно после нескольких дней размышлений я решил, что буду продолжать работать в направлении SCARA механик.
Механика рук — в классической SCARA один из моторов стоит на конце первой руки, это добавляет вес на выносе и требования к жесткости руки, собственно этого очень хотелось избежать, v1 и v2 решали эту проблему, для v3 это решается рычагом и короткими ремнями.
Видео (очень короткое) как это работает
Для хоуминга под каждый рычаг были добавлены микро-выключатели
Ось Z — в этот раз решил что у меня будет статическая платформа, а сама механика будет двигатся по Z, в этом есть несколько плюсов:
- статическая платформа, которую можно свободно отделить от базы и переместить заменить, да и на крайний случай просто сложить и положить в сторону чтобы не мешала
- как не странно жесткость базы от этого только выиграла так как в ее структуру добавились две 8mm направляющие
- компактность
Вид в разрезе (без home переключателей)
Z min переключатель
Все в сборе
Электроника — В этот раз решил вынести электронику (Ramps 1.4+DRV+LCD2004) в отдельный блок — тоже не спроста — после третьей сборки/разборки принтера мне надоело это делать и я соорудил бокс который будет кочевать от одного моего проекта к другому (само собой надо будет менять только прошивку)
Экструдер — так как механика позволяла гонять на скоростях 100+ простого экструдера стало не хватать — пришлось спроектировать Geared экструдер.
OpenScad файлы (scarav3.scad)
Прошивка
Результат
Результатом я более чем доволен, качество печати на данном принтере меня устраивает.
Из проблем можно отметить что есть небольшая волна по осям XY (из за дискретности шаговиков и количества шагов разбиения — сейчас 50)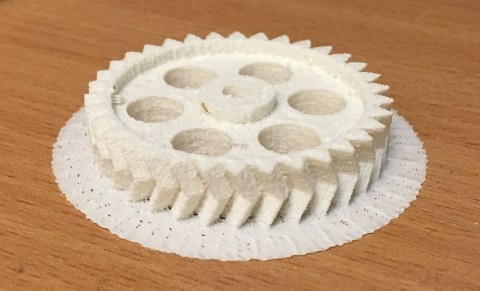
Дальнейшие идеи:
- Больший коэффициент передачи хотя бы x5 (сейчас x4)
- Уменьшения веса рук и увеличение их жесткости — сделаю с алюминия
- E3D v6 — уменьшения веса
- Меньшего размера шаговики — текущие на 4 кг*см немного избыточны
- Уменьшение длины ptfe трубки — очень важный показатель не для прямого экструдера — есть даже идея повесить экструдер на ось вращения рук — сработает при условии если предыдущий пункт будет выполнен
- Уменьшение габаритов — по высоте наиболее приоритетно
