Поляризатор = датчик угла

Поговорим о датчиках угла. В электронике это всегда больная тема, так как подразумевает подвижные детали. А, как известно, всё, что движется, все это в первую очередь и ломается!
Классическими способами измерения углов являются переменные резисторы, резольверы, энкодеры, акселерометры, гироскопы, GNSS приемники высокой точности. Но есть еще один остроумный и умозрительный способ измерять углы: при помощи поляризаторов.
Всем известен физический эффект поляризации. Это когда берут две поляризационные фильтра от фотоаппарата, накладывают их друг на друга и проворачивают. В результате свет то проходит то не проходит сквозь cэндвич из пластинок.
Угол между плоскостями поляризации | Световой поток через систему |
0 | Пропускает |
90 | блокирует |
180 | Пропускает |
270 | блокирует |
вот так это выглядит
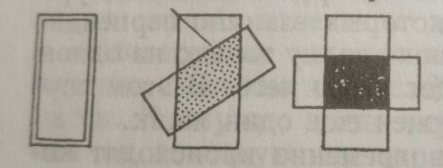
иллюстрация из учебника
Аналогично можно и решить обратную задачу. В математике всегда есть прямая и обратная задача. Дан уровень освещенности, вычислить угол поворота между плоскостями поляризации. Это наводит на мысли что на основе этого эффекта можно сконструировать электронно-оптический датчик угла.
Существует закон Малуса (1810 года). Это физический закон, выражающий зависимость интенсивности линейно-поляризованного света после его прохождения через поляризатор от угла phi между плоскостями поляризации падающего света и поляризатора.
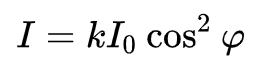
закон Малуса
Io — интенсивность падающего на поляризатор света, I — интенсивность света, выходящего из поляризатора, k-коэффициент прозрачности поляризатора, phi- угол между разрешенным направлением поляризатора и направлением поляризации входного света.
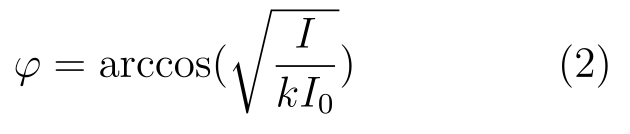
Из этой формулы выражается сам угол phi
Если собрать такой стенд

то график освещения от угла получится такой

Но вот незадача. При освещенности 0,4 возможны 4 различных варианта углов:50.7 Deg; 129.2 Deg; 230.7 Deg; 309.2 Deg. И как понять что истинный угол это например 50.7 градусов, а остальные 3 измерения — фейковые. Эти 4 циферки- просто результат решения тригонометрического уравнения (3)

Это не здорово. Как отсеять 3 лишних решения и оставить одно истинное?
В технике есть принцип добавления новых размерностей. Можно также поступить и тут. Можно добавить еще одну пару поляризаторов и обеспечить еще одно измерение для уменьшения неоднозначности.

Получается такое соотношение углов и показаний датчиков
phi | phi1 | phi2 |
0 | 0 | 45 |
90 | 90 | 135 |
180 | 180 | 225 |
270 | 270 | 315 |
360 | 360 | 45 |
Вот с этим уже можно работать.

Например когда датчик Ir1 видит значение 0,8 Lx, а Ir2=0.092 lx, то программа думает что угол равен
Iight sens 1 = 0.8 Lx | Light sens 2 =0.100 lx | ||
# | Deg | Deg | вывод |
1 | 26,56 | 26.56 | * возможное решение |
2 | 153,1 | 62.2 | не решение |
3 | 206,4 | 206 | * возможное решение |
4 | 333,2 | 243 | не решение |
Аналогична ситуация когда подлинный угол равен 150%. Электроника будет показывать 2 равновероятных варианта 150 Deg и 330 Deg. Стоит заметить, что эти два решения отличаются на 180 градусов.

Получается, что добавив один поляризационный датчик смещенный на +45% мы расширили диапазон измерений от 0…90 Deg до 0…180 Deg. Но этого всё равно мало. Это конечно никуда не годится. Было бы странно, если бы датчик курса самолета показывал, что мы летим либо на север либо на юг. Для полноценного датчика угла надо однозначно измерять диапазон от 0 до 360 градусов.
Как же быть?
Все мы помним со школьной скамьи формулу косинус на косинус

В связи с (4) этим формулу (1) можно переписать в виде (5)

Двойка перед phi наводит на мысли, что в устройстве нужен редуктор. Поэтому решением неоднозначности измерения угла может быть редуктор на шестернях, который уменьшает угловую скорость вращения поляризаторов в 2 раза.
Иначе говоря, за один оборот датчика угла, поляризатор сделает только пол оборота. Тогда графики показаний фотодатчиков 1 и 2 от угла вала phi получится такими

Появилась однозначность. Отлично.
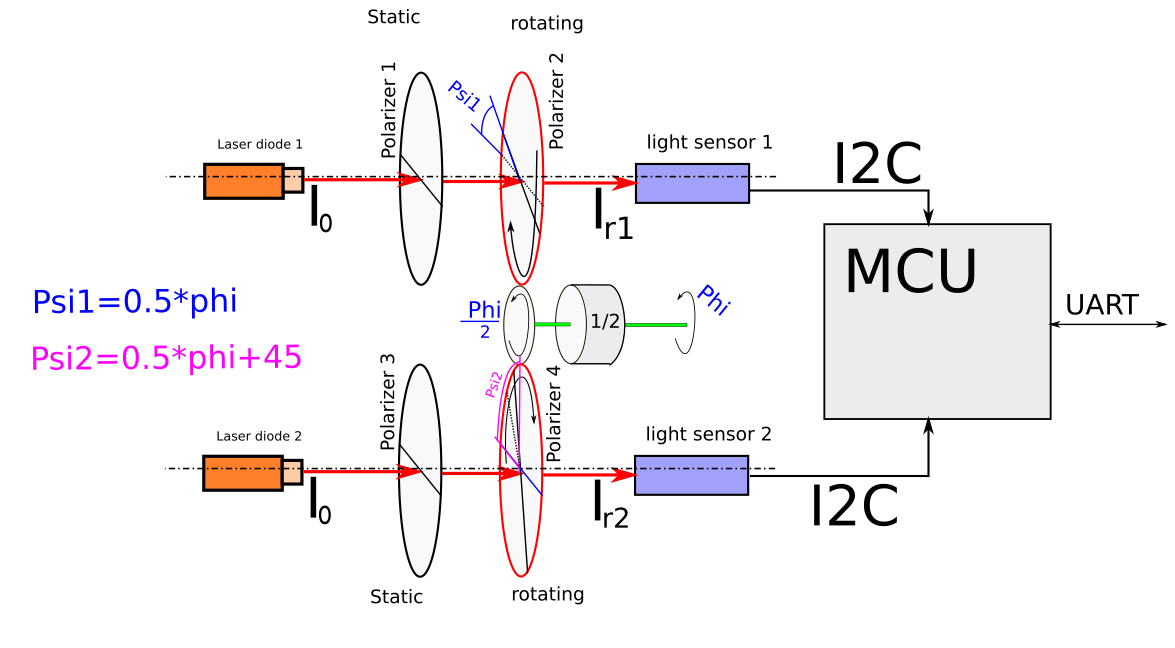
Можно собрать вот такую электронную начинку для обработки показаний датчиков.

Задача прошивки это постоянно и непрерывно численно решить систему уравнений (6) и выдавать решение на улицу (в UART)
/
тут phi это угол вала датчика угла. Истинный угол поворота поляризаторов psi связан с phi по формуле (7)

Достоинства измерения угла при помощи поляризаторов
++1 нет ограничения на угол. Можно измерять угол колес.
++2 угловая скорость вращения внутренних деталей в 2 раза меньше угловой скорости вращения вала датчика угла.
++3 Не нужно искать ноль подобно тому как это происходит в инкрементных энкодерах и в маховиках двигателей внутреннего сгорания. Тут же включил и сразу можно вычислить угол для любого положения вала.
++4 нет нужды в микрометрических деталях, подобно тем же инкрементным энкодерах, где на один оборот делают несколько тысяч отверстий.
++5 тут нет ничего такого, что бы имело больше габариты как в резольверах.
++6 Данному датчику не нужна гравитация, подобно тому как работают инклинометры на акселерометрах
Недостатки измерения угла при помощи поляризаторов
--1 Сложность конструкции. Нужен микроконтроллер, который будет опрашивать датчики освещения и пересчитывать значения в углы.
--2 надо 2 прецизионный источник освещения
--3 нужны 2 герметичные темные комнатки для исключения ошибок в фотодатчиках
--4 нужна изоляция от пыли
Вывод
Как видите измерение углов поляризационными пластинками в теории это вполне возможный способ автоматически измерять углы, а значит и угловые скорости. Однако, для реализации такого датчика нужны продвинутые производственные возможности и серьезный конструктив.
Сомневаюсь, что такой датчик угла на поляризаторах реально где-нибудь станут реализовывать. Слишком дорого и много мест вероятной поломки и отказа. Тем кому нужен датчик угла обычно ставят резольвер и это их более чем устраивает.
Как по мне, технология измерения углов поляризаторами подойдет для университетских лабораторных работ по физике или преобразователям информации. Там как раз принято делать измерения, анализировать графики и вычислять погрешности. Или просто ради Fun (а). Делают же соленойдные электродвигатели.
Links
http://latex.codecogs.com/eqneditor/editor.php
https://pythonru.com/biblioteki/pyplot-uroki
https://ru.wikipedia.org/wiki/Тригонометрические_функции
https://www.wolframalpha.com/
https://www.youtube.com/watch? v=L3Hbr_ObTn0
https://www.youtube.com/watch? v=wR-WPocc128&t=17s
https://www.youtube.com/watch? v=Y5MGDltGxCY&t=418s
https://www.youtube.com/watch? v=dD1ZsXRMKMg
https://www.youtube.com/watch? v=TtVwALGK72I
https://www.youtube.com/watch? v=Zzj-8PvQHuU
