Невидимый окулист. 5 микророботов внутри нашего тела на замену врачам
В течение последних лет ученые во всем мире искали способы использования нанороботов для лечения болезней. Они вводятся в организм человека, чтобы доставить лекарство или выполнить операции, требующие максимальной точности (например, очистка забитых артерий). Заменяя инвазивную, часто сложную операцию, такие роботы могут существенно оптимизировать медицину — и сейчас эта реальность ближе, чем когда-либо.
Робот-устрица для лечения глаз
У микроскопических медицинских роботов есть одна проблема: практически невозможно установить им хоть какие-то моторы и приводы, так как места едва ли хватает для необходимой электроники. Учитывая то, что глазная жидкость имеет весьма специфические свойства, для передвижения микроскопических роботов привычный привод не подходит.
Решением проблемы оказались роботы-устрицы, которые используют возвратно-поступательный привод — то есть движение вперед и назад, а не стандартное круговое вращение.
Исследователи из Института умных систем имени Макса Планка (Германия) под руководством профессора Пира Фишера выяснили, что роботы в форме устриц являются идеальными пловцами в неньютоновской жидкости.
Сегодня робот-устрица выступает в качестве базовой структуры будущих микророботов.
Микроскопический робот, который плавает по венам кролем
Специалисты Харбинского технического института (Китай) создали микроскопического робота, который умеет плавать по человеческим венам самым быстрым видом плавания — кролем. В размерах устройство достигает 5 микрометров и способно плавать со скоростью 10 мкм/с, преодолевая расстояние в 50 метров за месяц. В крови его скорость падает до 5,5 мкм/с, но это не мешает ему вовремя доставлять лекарства к нужному органу.
Тело микроробота создано из золота, а рабочие руки — из никеля. Благодаря изменению магнитного поля ученые института с легкостью могут управлять его направлением плавания, заставляя робота двигать руками. Правда, робот пока слишком мал, чтобы доставить органу необходимое количество лекарства, а введение в вену группы роботов опасно: управлять каждым из них по отдельности не получится.
Разработчики планируют глубокую доработку. Для этого они используют биоразлагаемые материалы, увеличивают размеры робота и дорабатывают систему плавания, что позволит запускать сразу несколько микроскопических лекарей в вену. Клинические испытания микророботов планируется провести в течение 10 лет.
Робот-бактерия от разработчиков из EPFL и ETHZ
Ученые институтов EPFL и ETHZ разработали робота, который имеет структуру бактерии, вызывающей африканский трипаносомоз (сонная болезнь). Бактерия передвигается с помощью жгутика и в нужный момент способна сворачивать его. По такому же принципу, откинув большинство вариантов, ученые разработали микроскопического робота, который повторяет структуру данной бактерии и имеет жгутик, благодаря чему может легко передвигаться в крови.
Роботы, имеющие форму бактерии, созданы из гибких материалов и не имеют приводов для движения. Они создаются из биосовместимого гидрогеля и магнитных наночастиц, которые позволяют под воздействием магнитного поля менять форму микроробота и заставлять его передвигаться в крови.
Ученым еще предстоит испытать разработку на предмет побочных эффектов и провести тесты управления группой микророботов.
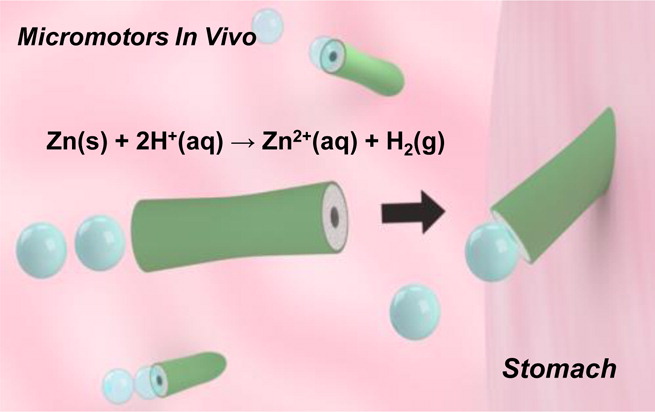
Робот, который доставляет лекарства в желудок
Калифорнийский Университет в Сан-Диего (США) опубликовал доклад об успешной прошлогодней транспортировке препарата в желудок подопытной мыши с помощью микроскопического робота. Главной задачей микроробота была доставка в стенку желудка мыши частички золота (имитация препарата), так как этот металл не растворяется под воздействием ее желудочного сока.
Цинковые наноботы передвигались в желудке благодаря химической реакции, вызываемой контактом цинка с желудочным соком. В результате этого образовались микропузырьки водорода, которые двигали робота вперед. Расстояние в 2,5 см микроробот преодолевал за 7 минут.
После выполнения наноботом поставленной перед ним задачи ученые изучили наполнение желудка мыши. Выяснилось, что микроробот доставил частичку золота в нужное место на стенке желудка, при этом не вызывая никаких побочных эффектов. Ученые продолжают доработку наноробота, совершенствуя его технологию и способы доставки лекарства.
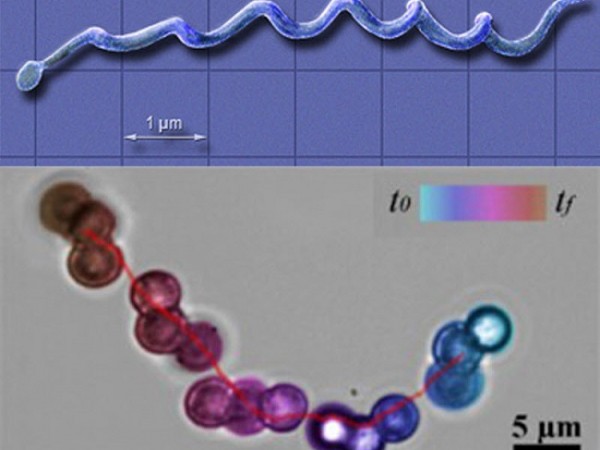
Роботы–наниты из Университета Дрекселя
Исследователи Университета Дрекселя (США) продемонстрировали широкой публике свою последнюю разработку — нанороботов в виде цепочек, состоящих из микроскопических шариков. Устройства были сформированы в цепочки от 3 до 13 шариков: чем она длиннее, тем быстрее движется наноробот.
Для движения робота использовалось магнитное поле, которое вращало цепочку подобно винту. Чем быстрее вращалось магнитное поле, тем быстрее вращалась и цепочка. Высокая частота вращения магнитного поля привела к деформации цепочки и разделению ее на более мелкие соединения из 3–4 шариков. Максимальная скорость движения наноробота, которую удалось зафиксировать, составляла 17,85 мкм/с.
Ученые продолжают работу над совершенствованием устройства. Планируется использовать разработку для доставки лекарств по организму с помощью кровеносной системы.
Больше интересного про робототехнику читайте на сайте robo-hunter.com
