Начинаем изучать Cortex-M на примере STM32, часть 2
Данная статья является продолжением цикла по программированию микроконтроллеров на базе ядра Cortex-M.Первую статью можно прочитать здесь: Начинаем изучать Cortex-M на примере STM32Задачей статей является подробное описание особенностей, возникающих при программировании МК. Материал не предназначен для желающих за 10 минут запустить пример мигания светодиодом. Я постараюсь подробно описать то, что часто скрывают от новичков, чтобы их не напугать.Мне очень хочется, чтобы программисты использующие стандартные библиотеки, шаблоны, примеры и т.д. понимали как все это работает. А при отсутствии этих самых библиотек и примеров могли самостоятельно решить свою задачу.
Основное акцент сделан на изучение документации на ядро Cortex-M и документации на конкретный контроллер.На этот раз речь пойдет про прерывания, а так же будут затронуты некоторые вопросы архитектуры памяти и структуры прошивки МК.
Несколько сорв про документацию ARM По не совсем ясным для меня причинам, нельзя зайти на сайт ARM и скачать полную документацию на ядро Cortex-M4. Да и на Cortex-M3 тоже нельзя.Придется почитать несколько документов. 1. Изучение придется начать с Cortex ™-M3 TechnicalReference Manual Revision: r1p1 — самой первой ревизии технической спецификации на ядро Cortex-M32. Во всех дальнейших ревизиях и описании Cortex ™-M4 TechnicalReference Manual описаны лишь общие данные и изменения относительно предыдущего документа.Так что прошу не удивляться ссылкам на спецификации другого ядра.Interrupt and Events Прежде всего необходимо разобраться с тем, что такое прерывания.В МК Cortex-M есть два понятия, которые часто путают Interrupt и Event.Event — это событие (аппаратное или программное), на которое могут реагировать ядро или периферийные блоки. Одним из вариантов реакции может быть — прерывание.Interrupt — это прерывание работы программы и переход управления в специализированный участок обработчик прерывания.Взаимосвязь между Event и Interrupt заключается в следующем: Каждый Interrupt вызывается Event, но не каждый Event вызывает Interrupt.Помимо прерываний, события могут активировать и другие возможности МК.
NVIC Управление и обработка прерываниями производится контроллером приоритетных векторных прерываний NVIC (Nested Vectored Interrupt Controller). Контроллер прерываний часть ядра Cortex-M. Документацию на этот контроллер необходимо начинать изучать сПри возникновении, некоторого события контроллер прерываний автоматически прерывает выполнение основной программы, и вызывает соответствующую функцию обработки прерываний. После выхода из функции обработчика прерываний программа продолжает выполнение с того места, где произошло прерывание. Все происходит автоматически (при правильной настройке NVIC, но об этом ниже).
Из самого названия видно, что контроллер NVIC поддерживает вложенность прерываний и приоритеты. Каждому прерыванию при настройке NVIC присваивается свой приоритет. Если во время обработки низкоприоритетного прерывания возникает высокоприоритетное, то оно, в свою очередь, прервет обработчик низкоприоритетного прерывания.
Как это работает? Данный пост не претендует на абсолютную полноту, я советую изучить раздел прерываний в Cortex™-M3 Technical Reference Manual. Поскольку эта часть ядра не претерпела изменений, ее описание дано в первой ревизии r1p1 на ядро Cortex-M3.Вход в прерывание и выход из него При инициации прерывания NVIC переключает ядро в режим обработки прерывания. После перехода в режим обработки прерывания регистры ядра помещаются в стек. Непосредственно во время записи значения регистров в стек осуществляется выборка начального адреса функции обработки прерывания.В стек перемещается регистр регистр статуса программы (Program Status Register (PSR)), счетчик программы (Program Counter (PC)) и регистр связи (Link Register (LR)). Описание регистров ядра приведено в Cortex-M4 Generic User Guide. Благодаря этому, запоминается состояние, в котором находилось ядро перед переходом в режим обработки прерываний.
Также сохраняются регистры R0 — R3 и R12. Эти регистры используются в инструкциях для передачи параметров, поэтому, помещение в стек делает возможным их использование в функции обработки прерывания, а R12 часто выступает в роли рабочего регистра программы.
По завершении обработки прерывания все действия выполнятся в обратном порядке: извлекается содержимое стека и, параллельно с этим, осуществляется выборка адреса возврата.
С момента инициации прерывания до выполнения первой команды обработчика прерывний проходит 12 тактов, такое же время необходимо для возобновления основной программы после завершения обработки прерывания.
Вложенность прерываний Как было сказано выше NVIC поддерживает прерывания с различными приоритетами, которые могут прерывать друг друга. При этом, могут возникнуть различные ситуации, обработка которых по разному оптимизирована.1. Приостановка низкоприоритетного прерыванияВ этой ситуации, обработка низкоприоритетного прерывания прекращается. Следующие 12 циклов выполняется сохранение в стек нового набора данных и запускается обработка высокоприоритетного прерывания. После его обработки, содержимое стека автоматически извлекается и возобновляется обработка низкоприоритетного прерывания.Больших отличий от прерывания основной программы не наблюдается.
2. Непрерывная обработка прерыванийЭта ситуация может возникнуть в двух случаях: если два прерывания имеют одинаковый приоритет и возникают одновременно, если низкоприоритетное прерывание возникает во время обработки высокоприоритетного.В этом случае, промежуточные операции над стеком не производятся. Происходит только загрузка адреса обработчика низкоприоритетного прерывания и переход к его выполнению. Отказ от операций над стеком экономит 6 тактов. Переход к следующему прерыванию происходит не за 12 тактов, а всего за 6.
3. Запаздывание высокприоритетного прерыванияСитуация возникает, если высокоприоритетное прерывание происходит во перехода к обработке низкоприоритетного (за те самые 12 тактов). В этом случае переход к высокоприоритетному прерыванию будет происходить не менее 6 тактов с момента его возникновения (время необходимое для загрузки адреса обработчика прерывания и перехода к нему). Возврат в низкоприоритетное уже описан выше.
Приоритеты прерываний Помимо простой установки приоритета прерываний, NVIC реализует возможность группировки приоритетов.Прерывания в группе с более высоким приоритетом могут прерывать обработчики прерываний группы с более низким приоритетом. прерывания из одной группы, но с разным приоритетом внутри группы не могут прерывать друг друга. Приоритет внутри группы определяет только порядок вызова обработчика, когда были активизированы оба события.Значение приоритета прерывания задается в регистрах Interrupt Priority Registers (см. Cortex-M4 Generic User Guide). При этом, часть бит отвечает за приоритет группы, в которой находится прерывание, а часть — за приоритет внутри группы.Настройка распределение бит на приоритет группы или приоритет внутри группы осуществляется с помощью регистра Application Interrupt and Reset Control Register (ВНИМАТЕЛЬНО!!! см. Cortex-M4 Generic User Guide).
Как вы, наверно, заметили, в Cortex-M4 Generic User Guide сказано, что настройка приоритетов и группировки приоритетов зависят от конкретной реализации implementation defined.А вот дальше не очень приятная вещь. В Reference manual к МК STM32F407 про NVIC почти нет информации. Но есть ссылка на отдельный документ. Для того, чтобы разобраться с реализацией NVIC в STM32 придется прочитать еще один документ — STM32F3xxx and STM32F4xxx Cortex-M4 programming manual. Вообще говоря, я советую внимательно изучить данный документ и по всем другим вопросам, в нем работа ядра расписана более подробно, чем в документации от ARM.В нем, уже можно найти:
A programmable priority level of 0–15 for each interrupt. A higher level corresponds to alower priority, so level 0 is the highest interrupt priority
Из возможных 8 бит приоритета используются только 4. Но этого вполне достаточно для большинства задач.Маскирование прерываний Предположим, что у нас стоит задача запуска ракеты-носителя при нажатии на красную кнопку, но только при условии, что повернут ключ.Нет совершенно ни какого смысла генерировать прерывание на поворот ключа. А вот прерывание на нажатие красной копки нам понадобится. Для того, чтобы включать/выключать различные вектора прерываний, существует маскирование прерываний.Маскирование прерывания осуществляется с помощью регистров Interrupt Set-enable Registers.Если прерывание замаскировано, это не означает, что периферия не генерирует события! Просто NVIC не вызывает обработчик этого события.Таблица векторов прерываний Все возможные прерывания, поддерживаемые NVIC, записываются в таблицу векторов прерываний. По сути своей, таблица векторов прерываний есть ни что иное, как список адресов функций обработчиков прерываний. Номер в списке соответствует номеру прерывания.Как написано в Cortex-M4 Generic User Guide, NVIC поддерживает до 240 различных векторов прерываний. Но реализация уже зависит от конкретного производителя.В описании ядра стандартизованы только прерывания исключений ядра (см. раздел 2.3.2 Exception types в Cortex-M4 Generic User Guide):
Reset NMI HardFault MemManage BusFault UsageFault SVCall PendSV SysTick С описанием этих исключений я предлагаю вам ознакомиться самостоятельно. Некоторые из них будут затронуты в следующих статьях.Остальные прерывания уникальны для МК. Описание таблицы векторов вашего МК вы можете найти в соответствующем Reference manual (см. Vector table for STM32F405xx/07xx and STM32F415xx/17xx). Контроллеры STM32F4xx поддерживают 81 вектор прерываний. Можно заметить, что в этой таблице перечислены все периферийные блоки (а некоторые не единожды).Практически все периферийные блоки генерируют прерывания, чтобы ядро отвлекалось на работку с ним только по наступлению какого-либо значимого события (например, получении данных по UART).Расположение векторов прерываний и загрузка МК Разобравшись с принципами работы прерываний в Cortex-M осталось понять только где хранится таблица прерываний.Для этого стоит рассмотреть процесс загрузки и структуру прошивки контроллера. На этот раз мы будем рассматривать только загрузку из встроенной флеш памяти.В таблице векторов, находящейся в начале адресного пространства флеш памяти должны находиться по крайней мере (см. Cortex-M3 Technical Reference Manual: • stack top address• reset routine location• NMI ISR location• Hard Fault ISR location.
Из начала флеш памяти ядро считывает значение SP (stack top addres) и PC (reset routine location). Таким образом, автоматически начинает выполняться функция, с адресом считанным в регистр PC. Это может быть, например main.После обязательных четырех компонентов, может находиться дальнейшая таблица векторов прерываний. Главное сохранить порядок.При желании, можно разместить таблицу векторов прерываний в другой области памяти, но тогда, необходимо сообщить NVIC, куда мы передвинули таблицу. За это смещение таблицы векторов отвечает регистр Vector Table Offset Register (см. Cortex-M4 Technical Reference Manual. Это может понадобиться для написание встроенного загрузчика нового ПО (bootloader), но об этом как-нибудь в другой раз.
От теории к практике
ТЗ второго проекта
Пример создается для отладочной платы STM32F4Discovery.При нажатии на кнопку должен загореться светодиод LED3. При замыкании контактов PC6 и GND загорается светодиод LED5.В процессе программирования поиграемся с приоритетами прерываний и посмотрим к чему это приведет.Железная часть
Найдем в документации к плате кнопку и светодиод:  При ненажатой кнопке на пине PA0 будет логический ноль, при нажатии на кнопку на кнопке появится логическая 1 (3.3В).Светодиод LED3 подключен к пину PD13.Светодиод LED5 подключен к пину PD14.Интересней всего с контактом PC6 — он напрямую выведен на штыревой разъем. Нам будет необходимо обеспечить регистрацию логической 1, когда он не закорочен с контактом GND. О том, как это сделать пойдет речь ниже.Настройка GPIO
Для нашей задачи необходимо настроить пины PD13 и PD14 как выходные. О том, как это делать можно прочитать в предыдущей статье.С настройкой пина PA0 тоже все достаточно просто — его нужно настроить на вход. Не смотря на то, что после ресчета МК почти все пины настроены на вход, крайне желательно явно прописать эту инициализацию.С пином PC7 все несколько интереснее. Поскольку он «висит в воздухе», его состояние не определено. Нам же необходимо, чтобы при этом его состояние всегда было »1». Для этого, в блоке GPIO активировать подтяжку. В нашем случае, необходима подтяжка к питанию — PULL UP.Активация подтяжки осуществляется с помощью регистра GPIO port pull-up/pull-down register.Прерывания EXTI
Для выполнения нашего «ТЗ» с использованием прерываний, нам необходимо настроить прерывания, которые будут срабатывать при переходе контакта PA0 из состояния »0» в состояние »1», и прерывание при переходе контакта PC6 из состояния »1» в состояние »0».В МК STM32F4xx для этой цели служит контроллер внешних прерываний/событий — EXTI (External interrupt/event controller). Я настоятельно рекомендую ознакомиться с его функционалом в Reference manual. Нам необходимо поступить в соответствии с описанным:
При ненажатой кнопке на пине PA0 будет логический ноль, при нажатии на кнопку на кнопке появится логическая 1 (3.3В).Светодиод LED3 подключен к пину PD13.Светодиод LED5 подключен к пину PD14.Интересней всего с контактом PC6 — он напрямую выведен на штыревой разъем. Нам будет необходимо обеспечить регистрацию логической 1, когда он не закорочен с контактом GND. О том, как это сделать пойдет речь ниже.Настройка GPIO
Для нашей задачи необходимо настроить пины PD13 и PD14 как выходные. О том, как это делать можно прочитать в предыдущей статье.С настройкой пина PA0 тоже все достаточно просто — его нужно настроить на вход. Не смотря на то, что после ресчета МК почти все пины настроены на вход, крайне желательно явно прописать эту инициализацию.С пином PC7 все несколько интереснее. Поскольку он «висит в воздухе», его состояние не определено. Нам же необходимо, чтобы при этом его состояние всегда было »1». Для этого, в блоке GPIO активировать подтяжку. В нашем случае, необходима подтяжка к питанию — PULL UP.Активация подтяжки осуществляется с помощью регистра GPIO port pull-up/pull-down register.Прерывания EXTI
Для выполнения нашего «ТЗ» с использованием прерываний, нам необходимо настроить прерывания, которые будут срабатывать при переходе контакта PA0 из состояния »0» в состояние »1», и прерывание при переходе контакта PC6 из состояния »1» в состояние »0».В МК STM32F4xx для этой цели служит контроллер внешних прерываний/событий — EXTI (External interrupt/event controller). Я настоятельно рекомендую ознакомиться с его функционалом в Reference manual. Нам необходимо поступить в соответствии с описанным:
Hardware interrupt selectionTo configure the 23 lines as interrupt sources, use the following procedure: • Configure the mask bits of the 23 interrupt lines (EXTI_IMR)• Configure the Trigger selection bits of the interrupt lines (EXTI_RTSR and EXTI_FTSR)• Configure the enable and mask bits that control the NVIC IRQ channel mapped to the external interrupt controller (EXTI) so that an interrupt coming from one of the 23 lines can be correctly acknowledged.
Нам понадобятся 0 и 6 линии EXTI. Для размаскирования соответствующих линий прерываний необходимо записать в регистр EXTI_IMR значение 0×9.Для линии PA0, необходима генерация события прерывания по переходу из состояния »0» в состояние »1» — по возрастающему фронту. То есть, необходимо записать 1 в нулевой бит регистра EXTI_RTSR.Для линии PC6, наоборот, необходима генерация события прерывания по переходу из состояния »1» в состояние »0» — по падающему фронту. То есть, необходимо записать 1 в шестой бит регистра EXTI_FTSR.На этом настройка блока EXTI закончена. Последний пункт будет реализован при настойке NVIC.По мимо этого, необходимо определиться, пин с какого порта подключается к определенной линии EXTI. Делается это с помощью регистров SYSCFG external interrupt configuration register (Reference manual). Эти регистры находятся в System configuration controller, что мне кажется не очень логичным (почему было не включить эту насторойку в EXTI?), но оставим сей факт на совести ST.
Настройка NVIC
Активация обработки определенного вектора прерывания осуществляется с помощью регистров Interrupt set-enable registers (NVIC_ISERx). Описание регистров приведено в Cortex-M4 Generic User Guide. Сама таблицу векторов прерываний для нашего МК приведена в Reference manual (см. Table 61).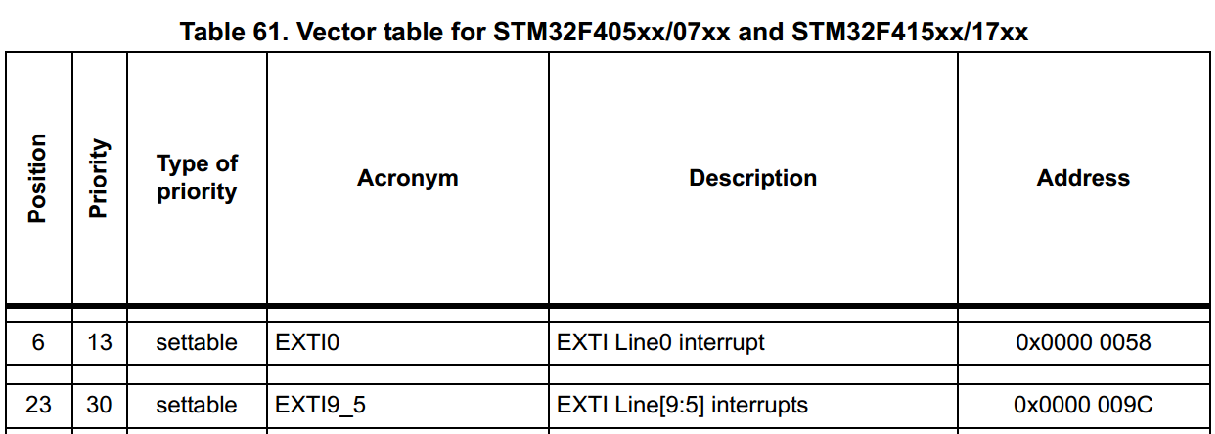 Из таблицы можно увидеть, что для 0 линии есть отдельное прерывание, а вот линии с 5 по 9 генерируют одно прерывание на всех.Кроме того, из таблицы мы узнали номера векторов, необходимых нам прерываний. Теперь нужно записать »1» в 6 бит (активация прерываний линии 0 EXTI) регистра NVIC_ISER0 (адрес 0xE000E100) и в 23 бит того же регистра (активация прерываний линий 5–9).Настройка приоритетов
Для того, чтобы можно было побаловаться с приоритетами прерываний настроим группы приоритетов так, чтобы 2 бита отвечали за приоритет внутри группы, и 2 бита — за приоритет самой группы. Для этого необходимо записать значение 0×05FA0500 в регистр Application interrupt and reset control register (STM32F3xxx and STM32F4xxx Cortex-M4 programming manual).Настройка приоритетов осуществляется с помощью регистров Interrupt Priority Registers (STM32F3xxx and STM32F4xxx Cortex-M4 programming manual). Нас будут интересовать регистры Interrupt Priority Register 2 (0xE000E4008) и регистр Interrupt Priority Register 5(0xE000E401C).Пока не будем изменять приоритеты. Пусть будут одинаковы для обоих прерываний.Обработка прерываний
Функции обработчики прерываний — ни что иное, как просто функции языка C, который ни чего не получают и не возвращают (и правильно — не от кого и не кому).Главное правило — обработка прерываний должна осуществляться как можно быстрее!!! Иначе низкоприоритетные прерывания могут слишком долго ждать.После окончания обработки прерывания необходимо сбросить активность события, вызвавшего прерывание — «очистить прерывание». Очистка прерывания EXTI производится с помощью регистра EXTI_PR. Обратите внимание: запись »1» очищает прерывание, запись »0» не имеет ни какого воздействия.
Из таблицы можно увидеть, что для 0 линии есть отдельное прерывание, а вот линии с 5 по 9 генерируют одно прерывание на всех.Кроме того, из таблицы мы узнали номера векторов, необходимых нам прерываний. Теперь нужно записать »1» в 6 бит (активация прерываний линии 0 EXTI) регистра NVIC_ISER0 (адрес 0xE000E100) и в 23 бит того же регистра (активация прерываний линий 5–9).Настройка приоритетов
Для того, чтобы можно было побаловаться с приоритетами прерываний настроим группы приоритетов так, чтобы 2 бита отвечали за приоритет внутри группы, и 2 бита — за приоритет самой группы. Для этого необходимо записать значение 0×05FA0500 в регистр Application interrupt and reset control register (STM32F3xxx and STM32F4xxx Cortex-M4 programming manual).Настройка приоритетов осуществляется с помощью регистров Interrupt Priority Registers (STM32F3xxx and STM32F4xxx Cortex-M4 programming manual). Нас будут интересовать регистры Interrupt Priority Register 2 (0xE000E4008) и регистр Interrupt Priority Register 5(0xE000E401C).Пока не будем изменять приоритеты. Пусть будут одинаковы для обоих прерываний.Обработка прерываний
Функции обработчики прерываний — ни что иное, как просто функции языка C, который ни чего не получают и не возвращают (и правильно — не от кого и не кому).Главное правило — обработка прерываний должна осуществляться как можно быстрее!!! Иначе низкоприоритетные прерывания могут слишком долго ждать.После окончания обработки прерывания необходимо сбросить активность события, вызвавшего прерывание — «очистить прерывание». Очистка прерывания EXTI производится с помощью регистра EXTI_PR. Обратите внимание: запись »1» очищает прерывание, запись »0» не имеет ни какого воздействия.
Если с обработкой прерывания линии 0 EXTI все достаточно просто, то с группой линий 5–9 возникает вопрос — как определить какая линия вызвала прерывание. Узнать это можно проверкой бит регистра Pending register (EXTI_PR) — Reference manual.
Создаем таблицу векторов и располагаем ее в правильном месте Для тог, чтобы таблица векторов с правильными адресами функций обработчиков прерываний располагались в начале флеш памяти МК, создадим и подключим к проекту файл startup.c. Содержимое файла // Enable the IAR extensions for this source file. #pragma language=extended #pragma segment=«CSTACK» // Forward declaration of the default fault handlers. void ResetISR (void); static void NmiSR (void); static void FaultISR (void); static void IntDefaultHandler (void); // The entry point for the application startup code. extern void __iar_program_start (void); extern void EXTI_Line0_IntHandler (void); extern void EXTI_Line6_IntHandler (void); // A union that describes the entries of the vector table. The union is needed // since the first entry is the stack pointer and the remainder are function // pointers. typedef union { void (*pfnHandler)(void); void * ulPtr; } uVectorEntry;
// The vector table. Note that the proper constructs must be placed on this to // ensure that it ends up at physical address 0×0000.0000. __root const uVectorEntry __vector_table[] @ ».intvec» = { { .ulPtr = __sfe («CSTACK») }, // The initial stack pointer ResetISR, // The reset handler NmiSR, // The NMI handler FaultISR, // The hard fault handler IntDefaultHandler, // MPU Fault Handler IntDefaultHandler, // Bus Fault Handler IntDefaultHandler, // Usage Fault Handler IntDefaultHandler, // Reserved IntDefaultHandler, // Reserved IntDefaultHandler, // Reserved IntDefaultHandler, // Reserved IntDefaultHandler, // SVCall Handler IntDefaultHandler, // Debug Monitor Handler IntDefaultHandler, // Reserved IntDefaultHandler, // PendSV Handler IntDefaultHandler, // SysTick Handler //External Interrupts IntDefaultHandler, // Window WatchDog IntDefaultHandler, // PVD through EXTI Line detection IntDefaultHandler, // Tamper and TimeStamps through the EXTI line IntDefaultHandler, // RTC Wakeup through the EXTI line IntDefaultHandler, // FLASH IntDefaultHandler, // RCC EXTI_Line0_IntHandler, // EXTI Line0 IntDefaultHandler, // EXTI Line1 IntDefaultHandler, // EXTI Line2 IntDefaultHandler, // EXTI Line3 IntDefaultHandler, // EXTI Line4 IntDefaultHandler, // DMA1 Stream 0 IntDefaultHandler, // DMA1 Stream 1 IntDefaultHandler, // DMA1 Stream 2 IntDefaultHandler, // DMA1 Stream 3 IntDefaultHandler, // DMA1 Stream 4 IntDefaultHandler, // DMA1 Stream 5 IntDefaultHandler, // DMA1 Stream 6 IntDefaultHandler, // ADC1, ADC2 and ADC3s IntDefaultHandler, // CAN1 TX IntDefaultHandler, // CAN1 RX0 IntDefaultHandler, // CAN1 RX1 IntDefaultHandler, // CAN1 SCE EXTI_Line6_IntHandler, // External Line[9:5]s IntDefaultHandler, // TIM1 Break and TIM9 IntDefaultHandler, // TIM1 Update and TIM10 IntDefaultHandler, // TIM1 Trigger and Commutation and TIM11 IntDefaultHandler, // TIM1 Capture Compare IntDefaultHandler, // TIM2 IntDefaultHandler, // TIM3 IntDefaultHandler, // TIM4 IntDefaultHandler, // I2C1 Event IntDefaultHandler, // I2C1 Error IntDefaultHandler, // I2C2 Event IntDefaultHandler, // I2C2 Error IntDefaultHandler, // SPI1 IntDefaultHandler, // SPI2 IntDefaultHandler, // USART1 IntDefaultHandler, // USART2 IntDefaultHandler, // USART3 IntDefaultHandler, // External Line[15:10]s IntDefaultHandler, // RTC Alarm (A and B) through EXTI Line IntDefaultHandler, // USB OTG FS Wakeup through EXTI line IntDefaultHandler, // TIM8 Break and TIM12 IntDefaultHandler, // TIM8 Update and TIM13 IntDefaultHandler, // TIM8 Trigger and Commutation and TIM14 IntDefaultHandler, // TIM8 Capture Compare IntDefaultHandler, // DMA1 Stream7 IntDefaultHandler, // FSMC IntDefaultHandler, // SDIO IntDefaultHandler, // TIM5 IntDefaultHandler, // SPI3 IntDefaultHandler, // UART4 IntDefaultHandler, // UART5 IntDefaultHandler, // TIM6 and DAC1&2 underrun errors IntDefaultHandler, // TIM7 IntDefaultHandler, // DMA2 Stream 0 IntDefaultHandler, // DMA2 Stream 1 IntDefaultHandler, // DMA2 Stream 2 IntDefaultHandler, // DMA2 Stream 3 IntDefaultHandler, // DMA2 Stream 4 IntDefaultHandler, // Ethernet IntDefaultHandler, // Ethernet Wakeup through EXTI line IntDefaultHandler, // CAN2 TX IntDefaultHandler, // CAN2 RX0 IntDefaultHandler, // CAN2 RX1 IntDefaultHandler, // CAN2 SCE IntDefaultHandler, // USB OTG FS IntDefaultHandler, // DMA2 Stream 5 IntDefaultHandler, // DMA2 Stream 6 IntDefaultHandler, // DMA2 Stream 7 IntDefaultHandler, // USART6 IntDefaultHandler, // I2C3 event IntDefaultHandler, // I2C3 error IntDefaultHandler, // USB OTG HS End Point 1 Out IntDefaultHandler, // USB OTG HS End Point 1 In IntDefaultHandler, // USB OTG HS Wakeup through EXTI IntDefaultHandler, // USB OTG HS IntDefaultHandler, // DCMI IntDefaultHandler, // CRYP crypto IntDefaultHandler, // Hash and Rng IntDefaultHandler, // FPU };
// This is the code that gets called when the processor first starts execution // following a reset event. Only the absolutely necessary set is performed, // after which the application supplied entry () routine is called. Any fancy // actions (such as making decisions based on the reset cause register, and // resetting the bits in that register) are left solely in the hands of the // application. void ResetISR (void) { // // Call the application’s entry point. // __iar_program_start (); }
// This is the code that gets called when the processor receives a NMI. This // simply enters an infinite loop, preserving the system state for examination // by a debugger. static void NmiSR (void) { // // Enter an infinite loop. // while (1) { } }
// This is the code that gets called when the processor receives a fault // interrupt. This simply enters an infinite loop, preserving the system state // for examination by a debugger. static void FaultISR (void) { // // Enter an infinite loop. // while (1) { } }
// This is the code that gets called when the processor receives an unexpected
// interrupt. This simply enters an infinite loop, preserving the system state
// for examination by a debugger.
static void
IntDefaultHandler (void)
{
//
// Go into an infinite loop.
//
while (1)
{
}
}
Использование
@ ».intvec»
Располагает таблицу __vector_table в начале секции, объявленной в файле линкера. Сам файл можно посмотреть тут:  Сама секция задается в начале ROM памяти. Адреса можно посмотреть тут (документ, в котором описана адресация флеш памяти STM32):
Сама секция задается в начале ROM памяти. Адреса можно посмотреть тут (документ, в котором описана адресация флеш памяти STM32):

Комбинация директивы IAR и спецфункции IAR:
#pragma segment=«CSTACK» __sfe («CSTACK») Записывает в начале флеша указатель на верхушку стека.Саму таблицу заполняют адреса функций, реализующий вечный цикл. Исключение сделано только для интересующих нас функций:
extern void EXTI_Line0_IntHandler (void);
extern void EXTI_Line6_IntHandler (void);
В функции, вызываемой при старте, просто производится переход к
extern void __iar_program_start (void);
Это функция — main (). Сам символ можно переопределить, если возникнет желание:  Переходим к основному файлу
Для начала выпишем и переопределим все адреса и битовые поля, которые нам понадобятся.Листинг
//Definitions for SCB_AIRCR register
#define SCB_AIRCR (*(unsigned volatile long*)0xE000ED0C) //acces to SCB_AIRCR
#define SCB_AIRCR_GROUP22 0×05FA0500 //change priority data
Переходим к основному файлу
Для начала выпишем и переопределим все адреса и битовые поля, которые нам понадобятся.Листинг
//Definitions for SCB_AIRCR register
#define SCB_AIRCR (*(unsigned volatile long*)0xE000ED0C) //acces to SCB_AIRCR
#define SCB_AIRCR_GROUP22 0×05FA0500 //change priority data
//Definitions for RCC_AHB1_ENR register #define RCC_AHB1_ENR (*(unsigned volatile long *)(0×40023830)) //acces to RCC_AHB1ENR reg #define RCC_AHB1_ENR_GPIOA 0×1 //GPIOA bitfield #define RCC_AHB1_ENR_GPIOC 0×4 //GPIOC bitfield #define RCC_AHB1_ENR_GPIOD 0×8 //GPIOD bitfield //Definitions for RCC_APB2_ENR register #define RCC_APB2_ENR (*(unsigned volatile long *)(0×40023844)) //acces to RCC_APB2ENR reg #define RCC_APB2_ENR_SYSCFG 0×4000 //SYSCFG bitfield //Definitions for GPIO MODE registers #define GPIOA_MODER (*(unsigned volatile long*)(0×40020000)) //acces to GPIOA_MODER reg #define GPIOC_MODER (*(unsigned volatile long*)(0×40020800)) //acces to GPIOC_MODER reg #define GPIOD_MODER (*(unsigned volatile long*)(0×40020C00)) //acces to GPIOD_MODER reg //GPIO ODR register definition #define GPIOD_ODR (*(unsigned volatile long*)(0×40020C14)) //acces to GPIOD_MODER reg #define GPIO_ODR_13PIN 0×2000 #define GPIO_ODR_14PIN 0×4000 //Bitfields definitions #define GPIO_MODER_0BITS 0×3 //Pin 0 mode bits #define GPIO_MODER_0IN 0×0 //Pin 0 input mode #define GPIO_MODER_6BITS 0×300 //Pin 6 mode bits #define GPIO_MODER_6IN 0×000 //Pin 6 input mode #define GPIO_MODER_13BITS 0xC000000 //Pin 13 mode bits #define GPIO_MODER_13OUT 0×4000000 //Pin 13 output mode #define GPIO_MODER_14BITS 0×30000000 //Pin 14 mode bits #define GPIO_MODER_14OUT 0×10000000 //Pin 14 output mode //GPIOC_PUPDR register definition #define GPIOC_PUPDR (*(unsigned volatile long*)(0×4002080C)) //acces to GPIOC_PUPDR reg #define GPIOC_PUPDR_6BITS 0×3000 //PC6 bitfield #define GPIOC_PUPDR_6PU 0×1000 //PC6 pull-up enable //SYSCFG_EXTIx registers definitions #define SYSCFG_EXTICR1 (*(unsigned volatile long*)0×40013808) //SYSCFG_EXTICR1 acces #define SYSCFG_EXTICR1_0BITS 0xF //EXTI 0 bits #define SYSCFG_EXTICR1_0PA 0×0 //EXTI 0 — port A #define SYSCFG_EXTICR2 (*(unsigned volatile long*)0×4001380C) //SYSCFG_EXTICR2 acces #define SYSCFG_EXTICR2_6BITS 0xF00 //EXTI 6 bits #define SYSCFG_EXTICR2_6PC 0×200 //EXTI 6 — port C //EXTI definitions #define EXTI_IMR (*(unsigned volatile long*)0×40013C00) //EXTI_IMR reg acces #define EXTI_LINE0 0×1 //LINE 0 definition #define EXTI_LINE6 0×40 //LINE 6 definition #define EXTI_RTSR (*(unsigned volatile long*)0×40013C08) //EXTI_RTSR reg acces #define EXTI_FTSR (*(unsigned volatile long*)0×40013C0C) //EXTI_FTSR reg acces #define EXTI_PR (*(unsigned volatile long*)0×40013C14) //EXTI_PR reg acces //NVIC registers and bits definitions #define NVIC_ISER0_REG (*(unsigned volatile long*)0xE000E100) //NVIC_ISER0 reg acces #define NVIC_ISER0_6VECT 0×40 //vect 6 definition #define NVIC_ISER0_23VECT 0×800000 //vect 30 definition
#define NVIC_IPR0_ADD (0xE000E400) #define NVIC_IPR23_REG (*(unsigned volatile char*)(NVIC_IPR0_ADD + 23)) #define NVIC_IPR6_REG (*(unsigned volatile char*)(NVIC_IPR0_ADD + 6)) Обратите внимание на то, что значения спецрегистров МК объявлены как volatile. Это необходимо, чтобы компилятор не пытался оптимизировать операции обращения к ним, поскольку это не просто участки памяти и их значения могут изменяться без участия ядра.Настраиваем группирование приоритетов В первую очередь стоит настроить группировку приоритетов прерываний: SCB_AIRCR = SCB_AIRCR_GROUP22; .Данное действие должно выполняться только один раз. В сложных проектах, использующих сторонние библиотеки стоит проверять данный факт. Изменение разбиения приоритетов на группы может привести к некорректной работе прошивки.Включение тактирование используемой периферии Напомню, что перед началом работы с периферийными блоками необходимо включить их тактирование: //Enable SYSCFG, GPIO port A and D clocking RCC_AHB1_ENR |= RCC_AHB1_ENR_GPIOA|RCC_AHB1_ENR_GPIOC|RCC_AHB1_ENR_GPIOD; RCC_APB2_ENR |= RCC_APB2_ENR_SYSCFG; Работать сразу с SYSCFG нельзя, нужно подождать несколько тактов. Но мы и не будем. Займемся инициализацией GPIO.Инициализация GPIO Светодиоды инициализируются так же как и в прошлый раз: //LED3 and LED5 initialization GPIOD_MODER = (GPIOD_MODER & (~GPIO_MODER_13BITS)) | GPIO_MODER_13OUT; GPIOD_MODER = (GPIOD_MODER & (~GPIO_MODER_14BITS)) | GPIO_MODER_14OUT; Кнопка PA0 и контакт PC7 инициализируются как входные: //PA0 and PC6 pins initialization GPIOA_MODER = (GPIOA_MODER & (~GPIO_MODER_0BITS)) | GPIO_MODER_0IN; GPIOC_MODER = (GPIOC_MODER & (~GPIO_MODER_6BITS)) | GPIO_MODER_6IN; Вот только для контакта PC6 необходимо включить подтяжку питания. Активация подтяжки производится с помощью регистра GPIOC_PUPDR: //Enable PC6 pull-up GPIOC_PUPDR = (GPIOC_PUPDR & (~GPIOC_PUPDR_7BITS)) | GPIOC_PUPDR_6PU; Настройка EXTI И так, на нужно настроить следующие параметры — включить прерывания для линий 0 и 6, для линии 0 прерывание по растущему фронту, для линии 6 — прерывание по падающему фронту: //Set up EXTI EXTI_RTSR |= EXTI_LINE0; EXTI_FTSR |= EXTI_LINE6; EXTI_IMR = EXTI_LINE0|EXTI_LINE6; Осталось настроить пины каких портов подключены к линии EXTI (странное решение, например МК stellaris могут генерировать прерывание при любой комбинации пинов, у STM32 с этим сложнее): //EXTI to port connection SYSCFG_EXTICR1 = (SYSCFG_EXTICR1&(~SYSCFG_EXTICR1_0BITS)) | SYSCFG_EXTICR1_0PA; SYSCFG_EXTICR2 = (SYSCFG_EXTICR2&(~SYSCFG_EXTICR2_6BITS)) | SYSCFG_EXTICR2_6PC; Настройка NVIC Осталось настроить приоритеты прерываний и маскировать их для инициации обработки. Обратите внимание, что регистры NVIC_IPR доступны для побайтового обращения, что значительно упрощает доступ только к необходимым байтам приоритетов отдельных векторов прерываний. Достаточно только сделать сдвиг на величину номера вектора прерывания (см. листинг определений). Еще раз напомним, что EXTI Line 0 имеет 6 номер в таблице векторов, а EXTI line 5_9 — номер 23. У STM32 значение имеют только старшие 4 бита приоритета: //Set interrupts priority NVIC_IPR6_REG = 0xF0; NVIC_IPR23_REG = 0×0; Для демонстрации приоритеты установлены различными.Теперь можно включить прерывания: //Enable interrupts NVIC_ISER0_REG |= NVIC_ISER0_6VECT | NVIC_ISER0_23VECT; С этого момента нажатие на кнопку и закоротки PC6 и GND будет приводить к вызову функций обработчиков прерываний EXTI_Line0_IntHandler и EXTI_Line6_IntHandler соответственно.Обработка прерываний В функциях обработки прерываний в первую очередь необходимо очистить прерывание, после этого можно зажечь светодиоды. Для демонстрации приоритетов прерываний в один из обработчиков добавлен вечный цикл. Если приоритет прерывания с вечным циклом ниже приоритета второго — то оно не сможет быть вызвано. Иначе, оно сможет прервать первое. Я предлагаю вам самим попробовать различные знчения приоритетов прерываний и наглядно увидеть к чему это приводит (ВНИМАНИЕ — не забудьте про группы прерываний!). void EXTI_Line0_IntHandler (void) { //Clear interrupt EXTI_PR = EXTI_LINE0; //Turn on LED 3 GPIOD_ODR |= GPIO_ODR_13PIN; } void EXTI_Line6_IntHandler (void) { //Clear interrupt EXTI_PR = EXTI_LINE6; //Turn LED4 GPIOD_ODR |= GPIO_ODR_14PIN; while (1); } Вместо заключения На всякий случай приведу полный листинг получившейся программы.Листинг //Definitions for SCB_AIRCR register #define SCB_AIRCR (*(unsigned volatile long*)0xE000ED0C) //acces to SCB_AIRCR #define SCB_AIRCR_GROUP22 0×05FA0500 //change priority data
//Definitions for RCC_AHB1_ENR register #define RCC_AHB1_ENR (*(unsigned volatile long *)(0×40023830)) //acces to RCC_AHB1ENR reg #define RCC_AHB1_ENR_GPIOA 0×1 //GPIOA bitfield #define RCC_AHB1_ENR_GPIOC 0×4 //GPIOC bitfield #define RCC_AHB1_ENR_GPIOD 0×8 //GPIOD bitfield //Definitions for RCC_APB2_ENR register #define RCC_APB2_ENR (*(unsigned volatile long *)(0×40023844)) //acces to RCC_APB2ENR reg #define RCC_APB2_ENR_SYSCFG 0×4000 //SYSCFG bitfield //Definitions for GPIO MODE registers #define GPIOA_MODER (*(unsigned volatile long*)(0×40020000)) //acces to GPIOA_MODER reg #define GPIOC_MODER (*(unsigned volatile long*)(0×40020800)) //acces to GPIOC_MODER reg #define GPIOD_MODER (*(unsigned volatile long*)(0×40020C00)) //acces to GPIOD_MODER reg //GPIO ODR register definition #define GPIOD_ODR (*(unsigned volatile long*)(0×40020C14)) //acces to GPIOD_MODER reg #define GPIO_ODR_13PIN 0×2000 #define GPIO_ODR_14PIN 0×4000 //Bitfields definitions #define GPIO_MODER_0BITS 0×3 //Pin 0 mode bits #define GPIO_MODER_0IN 0×0 //Pin 0 input mode #define GPIO_MODER_6BITS 0×300 //Pin 6 mode bits #define GPIO_MODER_6IN 0×000 //Pin 6 input mode #define GPIO_MODER_13BITS 0xC000000 //Pin 13 mode bits #define GPIO_MODER_13OUT 0×4000000 //Pin 13 output mode #define GPIO_MODER_14BITS 0×30000000 //Pin 14 mode bits #define GPIO_MODER_14OUT 0×10000000 //Pin 14 output mode //GPIOC_PUPDR register definition #define GPIOC_PUPDR (*(unsigned volatile long*)(0×4002080C)) //acces to GPIOC_PUPDR reg #define GPIOC_PUPDR_6BITS 0×3000 //PC6 bitfield #define GPIOC_PUPDR_6PU 0×1000 //PC6 pull-up enable //SYSCFG_EXTIx registers definitions #define SYSCFG_EXTICR1 (*(unsigned volatile long*)0×40013808) //SYSCFG_EXTICR1 acces #define SYSCFG_EXTICR1_0BITS 0xF //EXTI 0 bits #define SYSCFG_EXTICR1_0PA 0×0 //EXTI 0 — port A #define SYSCFG_EXTICR2 (*(unsigned volatile long*)0×4001380C) //SYSCFG_EXTICR2 acces #define SYSCFG_EXTICR2_6BITS 0xF00 //EXTI 6 bits #define SYSCFG_EXTICR2_6PC 0×200 //EXTI 6 — port C //EXTI definitions #define EXTI_IMR (*(unsigned volatile long*)0×40013C00) //EXTI_IMR reg acces #define EXTI_LINE0 0×1 //LINE 0 definition #define EXTI_LINE6 0×40 //LINE 6 definition #define EXTI_RTSR (*(unsigned volatile long*)0×40013C08) //EXTI_RTSR reg acces #define EXTI_FTSR (*(unsigned volatile long*)0×40013C0C) //EXTI_FTSR reg acces #define EXTI_PR (*(unsigned volatile long*)0×40013C14) //EXTI_PR reg acces //NVIC registers and bits definitions #define NVIC_ISER0_REG (*(unsigned volatile long*)0xE000E100) //NVIC_ISER0 reg acces #define NVIC_ISER0_6VECT 0×40 //vect 6 definition #define NVIC_ISER0_23VECT 0×800000 //vect 30 definition
#define NVIC_IPR0_ADD (0xE000E400) #define NVIC_IPR23_REG (*(unsigned volatile char*)(NVIC_IPR0_ADD + 23)) #define NVIC_IPR6_REG (*(unsigned volatile char*)(NVIC_IPR0_ADD + 6))
void EXTI_Line0_IntHandler (void); void EXTI_Line6_IntHandler (void);
void main () { //NVIC SCB_AIRCR = SCB_AIRCR_GROUP22;
//Enable SYSCFG, GPIO port A, C and D clocking RCC_AHB1_ENR |= RCC_AHB1_ENR_GPIOA|RCC_AHB1_ENR_GPIOC|RCC_AHB1_ENR_GPIOD; RCC_APB2_ENR |= RCC_APB2_ENR_SYSCFG; //LED3 and LED5 initialization GPIOD_MODER = (GPIOD_MODER & (~GPIO_MODER_13BITS)) | GPIO_MODER_13OUT; GPIOD_MODER = (GPIOD_MODER & (~GPIO_MODER_14BITS)) | GPIO_MODER_14OUT;
//PA0 and PC6 pins initialization GPIOA_MODER = (GPIOA_MODER & (~GPIO_MODER_0BITS)) | GPIO_MODER_0IN; GPIOC_MODER = (GPIOC_MODER & (~GPIO_MODER_6BITS)) | GPIO_MODER_6IN; //Enable PC7 pull-up GPIOC_PUPDR = (GPIOC_PUPDR & (~GPIOC_PUPDR_6BITS)) | GPIOC_PUPDR_6PU; //Set up EXTI EXTI_RTSR |= EXTI_LINE0; EXTI_FTSR |= EXTI_LINE6; EXTI_IMR = EXTI_LINE0|EXTI_LINE6;
//EXTI to port connection SYSCFG_EXTICR1 = (SYSCFG_EXTICR1&(~SYSCFG_EXTICR1_0BITS)) | SYSCFG_EXTICR1_0PA; SYSCFG_EXTICR2 = (SYSCFG_EXTICR2&(~SYSCFG_EXTICR2_6BITS)) | SYSCFG_EXTICR2_6PC;
//Set interrupts priority NVIC_IPR6_REG = 0xF0; NVIC_IPR23_REG = 0×00; //Enable interrupts NVIC_ISER0_REG |= NVIC_ISER0_6VECT | NVIC_ISER0_23VECT;
while (1) { } }
void EXTI_Line0_IntHandler (void) { //Clear interrupt EXTI_PR = EXTI_LINE0; //Turn on LED 3 GPIOD_ODR |= GPIO_ODR_13PIN; } void EXTI_Line6_IntHandler (void) { //Clear interrupt EXTI_PR = EXTI_LINE6; //Turn LED4 GPIOD_ODR |= GPIO_ODR_14PIN; while (1); } Для проверки влияния приоритетов прерываний и приоритетов групп прерываний попробуйте менять приоритеты и наблюдать, что будет происходить (два бита — приоритет внутри группы, 2 бита — приоритет группы).
