Логика автопилота для летательных аппаратов самолетного типа при переходе от вертикального полета к горизонтальному
Идея выполнения вертикального взлета для самолетов и дронов самолетной конфигурации не является чем-то из будущего. Большинство решений, использующихся сегодня, являются конвертопланами, то есть оборудованы механизмом, который изменяет плоскость вращения винтов или направление реактивной струи. Развитие транспортных БПЛА для городских и региональных грузопассажирских перевозок привело к развитию концепции летательных аппаратов с зафиксированным положением двигателей, часть из которых создают вертикальную тягу, а другая часть горизонтальную. В этой статье постараюсь рассмотреть процесс создания автоматической системы управления для перехода от вертикального к горизонтальному полету.
Hidden text
Дисклеймер! Это мой первый опыт написания статьи в более свободном формате, нежели формат научных статей и публикаций, так что тапками попрошу не кидаться. Здравая и аргументированная критика приветствуется.
Проблема
При выполнении вертикального взлета подъемная сила создается исключительно двигателями, работающими в вертикальной плоскости. Двигатели, создающие тягу в горизонтальной плоскости, работают на минимальном режиме или полностью остановлены, то есть не приводят летательный аппарат в движение, создавая поток воздуха у крыла. В горизонтальном полете конфигурация прямопротивоположная: тяга создается исключительно в горизонтальной плоскости, подъемная сила создается крылом, а вертикально расположенные двигатели выключены.
Когда летательный аппарат взлетел, требуется переход из одной конфигурации в другую. У конвертопланов это происходит с плавным изменением вектора тяги с одновременным созданием потока вокруг крыла и достаточной подъемной силы к моменту, когда тяга направлена горизонтально. Для летательных аппаратов с горизонтальными и вертикальными двигателями возможны следующие проблемы:
Возникновение момента вокруг поперечной оси, если двигатели смещены вдоль вертикальной оси относительно центра масс;
Возникновение медленно-затухающих продольных (фугоидных) колебаний из-за скачкообразного изменения значения вектора тяги;
Возникновение краткосрочных продольных колебаний с высокими перегрузками при попытке автопилота сохранить тангаж около нуля.
Автоматическая система управления должна быть способна самостоятельно изменять тягу двигателей и определять необходимое отклонение управляющих поверхностей для поддержания условий.
Немного теории
Выполнение перехода возможно двумя различными способами, которые отличаются этапом разгона и набора высоты. Представим, что БПЛА поднимается на высоту 20 метров вертикально, затем ему нужно набрать высоту в 150 метров для выполнения полета уже в горизонтальной конфигурации.
Первый способ представляет собой ступенчатый набор. На высоте 20 метров БПЛА с помощью горизонтальных двигателей разгоняется до скорости, необходимой для создания достаточной подъемной силы крылом и выключения вертикальных двигателей. Затем аппарат продолжает разгон до скорости, на которой уже создается подъемная сила для набора высоты. Конечно, незначительным изменением тангажа можно изменить и угол атаки, создав таким образом необходимую подъемную силу уже на скорости выключения вертикальных двигателей, но подъемная сила имеет линейную зависимость от угла атаки и квадратичную от аэродинамической скорости. Таким образом, выгоднее и безопаснее набрать скорость и незначительно изменить угол атаки, нежели сохранять минимальную скорость.

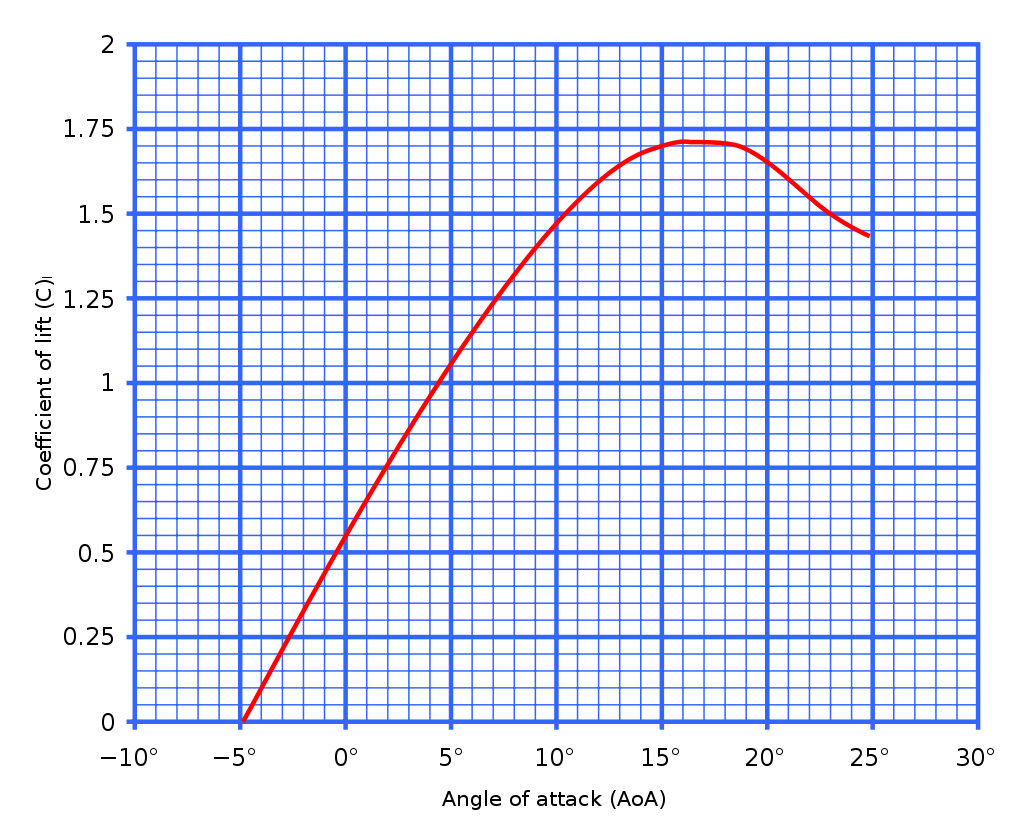
Коэффициент подъемной силы от угла атаки
Второй способ представляет собой бесступенчатый набор. Этот способ сложнее для процесса автоматизации, так как одновременно необходимо создание постоянной подъемной силы на крыле, достаточной для набора высоты с постоянной скоростью уже на этапе перехода и регулирование тяги вертикальных и горизонтальных двигателей. Важный момент заключается в том, что требуется изначально рассчитать вертикальную скорость, с которой аппарат будет набирать высоту. Уже на этом этапе может возникнуть трудность, так как вертикальные двигатели могут изначально не выдавать тягу (которая и будет подъемной силой), достаточную для создания вертикальной скорости, которая создается крылом на желаемой горизонтальной скорости. Таким образом этап набора будет происходить бесступенчато, но с разными углами наклона траектории, что напрямую отразится на тангаже и приведет к необходимости его изменения путем создания момента вокруг поперечной оси с дальнейшим созданием продольных колебаний, которые будет необходимо затушить, что приведет значительному усложнению самой системы автоматического регулирования.
Остановимся на первом варианте, то есть ступенчатом наборе. В данном случае нам требуется постепенно увеличить скорость летательного до заданного значения, скажем, 20 метров в секунду. На этом этапе имеем две проблемы: во-первых, в отличии от симуляции с помощью компьютерных программ, двигателям требуется время достичь нужного числа оборотов для создания достаточной тяги, чтобы сдвинуть летательный аппарат с места, во-вторых, большие ускорения требуют большей приложенной силы, что возвращает нас ко второй проблеме, обозначенной выше.
Решение
Примем как данность, что наш автопилот уже умеет регулировать тягу двигателей, способен изменять тангаж, крен и рыскание с помощью управляющих поверхностей крыльевого и хвостового оперений и компенсировать возникающие моменты. В этом случае нам необходимо лишь создать регулирующию систему, обеспечивающую набор скорости с заданными параметрами.
Проблемы 1 и 3 связаны между собой: возникновение момента относительно поперечной оси приводит к изменению тангажа, увеличивая или уменьшая его, автопилот же старается изменения тангажа свести к нулю, отклоняя управляющие поверхности или изменяя тягу вертикальных двигателей. На скачкообразное изменение тангажа автопилот будет отвечать скачкообразным отклонением управляющих поверхностей или изменением тяги вертикальных двигателей. В лучшем случае это приведет к возникновению быстро затухающих продольных колебаний, которые будут компенсированы самим летательным аппаратом благодаря аэродинамической схеме. В худшем же случае автопилот может повести себя как обычный пилот и начать пытаться компенсировать постоянно возникающее отклонение от заданного значения тангажа, что приведет к колебаниям (пример таких колебаний и их последствий, обычно вызываемых пилотом, можно посмотреть здесь и здесь).
Проблема 2, в свою очередь, является с одной стороны самостоятельной проблемой, связанной с увеличением скорости из-за увеличения тяги (а как следствие, образуется цепочка увеличение скорости => увеличение подъемной силы => увеличение угла наклона траектории => увеличение тангажа => незначительное увеличение угла атаки => увеличение подъемной силы => увеличение аэродинамического сопротивления => уменьшение скорости => уменьшение подъемной силы => уменьшение угла наклона траектории => … => увеличение скорости), что приводит к затухающим колебаниям с большим периодом. С другой стороны, автопилот пытается минимизировать изменения тангажа при этих колебаниях (проблема 3), а в случае смещения двигателей вдоль вертикальной оси еще и тяга приводит к возникновению момента (проблема 1).
Учитывая эти факторы, постараемся их минимизировать. Схема ниже демонстрирует базовую систему с замкнутым контуром управления, в котором выходной сигнал пропускается через лимитер.

Замкнутый контур с PID-контроллером и лимитером
PID-контроллеры наиболее распространены в системах автоматического управления и могут использоваться как полностью (с использованием P, I и D элементов), так и частично. Данный замкнутый контур регулирует горизонтальную скорость. На вход в качестве сигнала поступает скорость, которую необходимо набрать, которая сравнивается с текущей. Разница скоростей передается в PID-контроллер, который на выходе выдает новое значение скорости, которую на этот шаг должен достичь автопилот.
Как видно на графике ниже, скорость в первый же момент начинает расти, при этом с уменьшающимся ускорением. Таким образом, будет уменьшаться потребная тяга для создания этого самого ускорения, но в первый момент автомат тяги рассчитает невероятно большое скачкообразное изменение тяги, чтобы достичь ускорения в примерно 5 метров на секунду в квадрате, плавно затем снижая его до 0. Резкое создание подобной тяги вызовет фугоидные колебания (проблема 2), что повлечет за собой и попытку автопилота их минимизировать (проблема 3).

График скорости от времени: заданная скорость (желтым), скорость на выходе PID-контроллера (красным), скорость с лимитированным ускорением (синим)
Во избежание больших ускорений, а как следствие и колебаний или даже момента, лимитируем допустимое ускорение, установив верхнюю границу на уровне 1.5 метра на секунду в квадрате. Значением выбираем исходя из массы летательного аппарата и расположения двигателей. Например, для аппарата массой в 32 килограмма потребная тяга составит всего 48 ньютонов. При смещении двигателей вдоль вертикальной оси на полметра вверх это создаст момент в 24 Нм. Для сравнения, ускорение в 5 метров на секунду в квадрате потребует тягу в 160 ньютонов и создаст момент в 80 Нм.
Еще одним преимуществом постоянного ускорения является и малая амплитуда возникающих фугоидных колебаний в следствии изменения скорости. Кроме того, в силу того, что потребная тяга для создания ускорения без лимитера будет уменьшаться, а двигатели с некоторой задержкой выходят на необходимый режим работы, значение тяги никогда не достигнет значения, необходимого в первую секунду, таким образом, точность такой модели будет значительно ниже, чем модели с лимитером.
Заключение
Используя простой автомат управления скоростью (именно скоростью, а не тягой) на основе PID-регулятора в котором используется только интегратор с пропуском сигнала через лимитер можно добиться плавного перехода из вертикального полета в горизонтальный. Стоит отметить, что с использованием динамического лимитера, граничные значения которого будут зависить от аэродинамической скорости, отклонения руля крена и других параметров, можно создать более плавный переход. Кроме того, расширение управляющего контура с возможность дополнительно контролировать тангаж позволит избежать фугоидных колебаний и при этом повысить значение ускорения, что приведет к более быстрому переходу в горизонтальный режим полета.
