[Перевод] Вспоминаем легенду: как устроен BigDog от Boston Dynamics

BigDog стал первым роботом Boston Dynamics, получившим широкую известность. Во многом именно он «сделал имя» своей компании-создателю. Робот для военных, от которого отказались военные, и первый робот Boston Dynamics, которого на камеру пинали разработчики.
Сейчас на проекте поставлен крест, но он стал основой для последующих разработок компании — Cheetah и новых Spot, видео с которыми быстро стали вирусными.
Сегодня попытаемся разобраться в устройстве BigDog со слов его разработчиков. Оригинальную статью авторы опубликовали еще в 2008 году, но она до сих пор (вроде как) не была переведена на русский. В ней рассказано о главных компонентах робота и алгоритмах, координирующих его походку.
Цель проекта BigDog — создание автономных устройств с ногами с возможностью движения по пересеченной местности. Они должны превосходить существующие колесные и гусеничные транспортные средства. Идеальная система должна проходить везде, куда может пойти человек или животное, бежать в течение многих часов и нести вес в виде собственного топлива и полезной нагрузки. Она достаточно умна, чтобы пересекать местность с минимальным человеческим вмешательством и управлением.
Созданные роботы BigDog помогли сделать несколько шагов для достижения этих целей, хотя впереди еще много работы.
У BigDog есть бортовые системы, которые обеспечивают питание, приведение в действие, сбор данных о среде, контроль и коммуникацию. Питание поставляет охлаждаемый водой двухтактный ДВС, который обеспечивает порядка 15 л.с. Он приводит в движение насос, который доставляет гидравлическое масло через систему фильтров, коллекторов, аккумуляторов к актуаторам роботических ног. Актуаторы представляют собой низко-фрикционные гидравлические цилиндры, регулируемые двухступенчатыми сервоклапанами. У каждого актуатора есть сенсоры, которые контролируют положение сустава и силу. У каждой ноги — 4 гидравлических актуатора, которые питают суставы. Теплообменник, установленный на корпусе BigDog, охлаждает масло, а радиатор охлаждает двигатель для устойчивости операций.
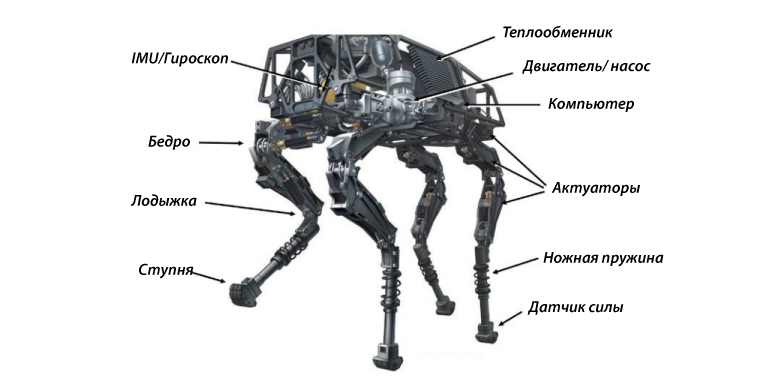
Основные элементы конструкции BigDog
Бортовой компьютер контролирует поведение BigDog, управляет сенсорами и отвечает за коммуникацию с удаленным оператором. Он также записывает большое количество инженерных данных для анализа производительности, анализа ошибок и операционной поддержки.
У BigDog порядка 50 сенсоров. Инерционные датчики измеряют позицию и ускорение тела, датчики суставов измеряют движение и силу суставных актуаторов. Бортовой компьютер обрабатывает информацию от всех этих датчиков, чтобы дать оценку того, как движется робот. Еще одна группа сенсоров контролирует гомеостаз BigDog: гидравлическое давление, потоки и температуру, скорость двигателя и пр.
Бортовой компьютер выполняет как низко-, так и высокоуровневые контролирующие функции. Низкоуровневая система контролирует положение сервоприводов и питание в суставах. Высокоуровневая координирует положение ног для регуляции скорости, положения и высоты тела во время передвижения. Она также отслеживает силу взаимодействия с землей, чтобы обеспечить устойчивое движение.
BigDog имеет множество вариантов движения. Он может вставать, приседать, ходить ползучей походкой, ходить, поднимая только одну ногу за раз, идти рысью и галопом. Скорость при ползущей походке составляет 0,2 м/с, для рыси — 1,6 м/с, для бега — 2 м/с (в лабораторных условиях максимальный показатель скорости составил 3,1 м/с). Кроме того, робот умеет прыгать на 1,1 м.
BigDog обычно контролируется человеком-оператором, который работает с блоком управления, соединенным с роботом через IP-радиоприемники. Оператор осуществляет высокоуровневое управление движением и скоростью. Он также может приказать роботу запустить или остановить двигатель, встать, сесть, идти или перейти на бег.
[О том, как разрабатывался алгоритм автономной навигации для робота, можно прочитать здесь]
В робота интегрировали систему стереозрения и лидар. Система стереозрения, разработанная Jet Propulsion Laboratory, состоит из пары стереокамер, компьютера и зрительного ПО. Она используется для получения 3D-формы ландшафта впереди робота и нахождения им пути. Лидар нужен, чтобы BigDog мог следовать за человеком без дополнительных команд оператора.
Контролирование походки
Чтобы двигаться со скоростью человека, BigDog использует динамически уравновешенную походку рысью. Он балансирует, используя боковую скорость и ускорение, определяемые по ощущаемому поведению ног в сочетании с инерционными датчиками.
Система управления BigDog координирует кинематику и наземные реакции робота, реагируя на основные постуральные команды. Контроллер распределяет нагрузку между ногами, чтобы оптимизировать их несущую способность. Вертикальная нагрузка на конечности поддерживается как можно более равномерной, а отдельные ноги генерируют наземные реакции, направленные на бедра, чтобы снизить трение.
Алгоритм координации походки, ответственный за коммуникацию между конечностями, запускает движение ног. Его координирует модель виртуальной ноги. Общую схему контроля ходьбы BigDog можно представить так:
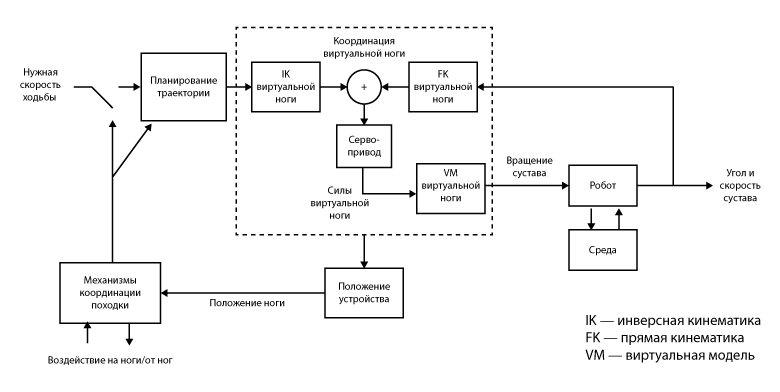
Схема контроля ходьбы BigDog
Мы разработали алгоритмы ходьбы для неровной местности и протестировали их в физическом моделировании перед тестированием на роботе. Моделируемый робот ходит по склонам под углом до 60 градусов. Алгоритм его движения меняется в зависимости от того, идет он по ровной поверхности или по склону. Кроме того, он учитывает неожиданные препятствия на пути, такие как камни или ямы.

Физическое моделирование использовалось при разработке алгоритмов походки
Система управления использует информацию с суставного датчика, чтобы определить, находятся ли «ноги» в настоящий момент на земле и определить нагрузку на каждую конечность и привод. Алгоритм состояния контролирует положение тела, координируя кинематику конечностей с силами реакции ног, контактирующих с землей. Алгоритм состояния реализует правильное движение ног на неровной поверхности. Это позволяет контролировать повороты, шаг и высоту тела относительно земли, тем самым давая возможность BigDog адаптироваться к изменениям ландшафта без датчиков более высокого уровня восприятия местности.
BigDog адаптируется к местности двумя способами. Он регулирует высоту и отношение тела к ландшафту и контролирует, куда ставить ноги. При подъеме и спуске со склонов тело робота наклоняется. Крутые склоны (более чем 45 градусов) робот преодолевает, корректируя походку и используя более мелкие шаги.
В конце статьи авторы поименно благодарят всех 23 человек из команды BigDog и делятся планами на будущее: укрепить корпус робота, сделать BigDog автономным и сделать его работу тише (бензиновый двигатель шумит как мотоцикл). Последний пункт, как показало время, так и остался серьезной проблемой.
Больше интересного о робототехнике — на robo-hunter.com:
