[Из песочницы] Обзор домашнего робота ver 0.3
[embedded content]Обзор сделанного в домашних условиях робота на основе arduino, bluetooth и android.Вдохновившись статьями на хабре, тоже решил сделать робота. По началу казалось всё это жутко сложным и мало понятным, но по мере изучения темы оказалось что сделать робота на основе современных технологий достаточно просто. Пригодились знания школьной физики по электротехнике и С++, хотя знать нужно на самом деле минимум и порог вхождения низкий.Изначально стоял выбор или собирать по запчастям робота или купить готовый кит (набор, конструктор). Долго выбирал, но поразмыслив что опыта и знаний в робостроении нет, остановился на «Bluetooth Controlled Robot Smart Car Kits For Arduino». В нем есть всё необходимое чтобы собрать и запрограммировать робота, без работы паяльником. Единственный минус нет инструкции. Хотя потом была найдена бедная инструкция в интернете на английском и китайском языке. Есть подозрение что выпускается этот конструктор кит для китайских школьников или студентов.
В нем есть всё необходимое чтобы собрать и запрограммировать робота, без работы паяльником. Единственный минус нет инструкции. Хотя потом была найдена бедная инструкция в интернете на английском и китайском языке. Есть подозрение что выпускается этот конструктор кит для китайских школьников или студентов.
Что пришло вместе с конструктором:  4 x мотор с редуктором4 x колеса (крепления колес сделаны не качество и со временем разболтались и начали слезать, пришлось прикрутить на саморезы)4 x Крепление моторов (алюминиевые бруски)2 x Пластины из оргстекла (100×213 x 5mm)
4 x мотор с редуктором4 x колеса (крепления колес сделаны не качество и со временем разболтались и начали слезать, пришлось прикрутить на саморезы)4 x Крепление моторов (алюминиевые бруски)2 x Пластины из оргстекла (100×213 x 5mm) По пластинам надо сказать отдельно, когда начал собирать оказалось что одна пластина вырезана криво со смещением и ко второй не подходит. По видимому китаец который ее вырезал был пьян: (Поэтому пришлось самому вырезать новую из фанеры.1 x L298N драйвер моторов
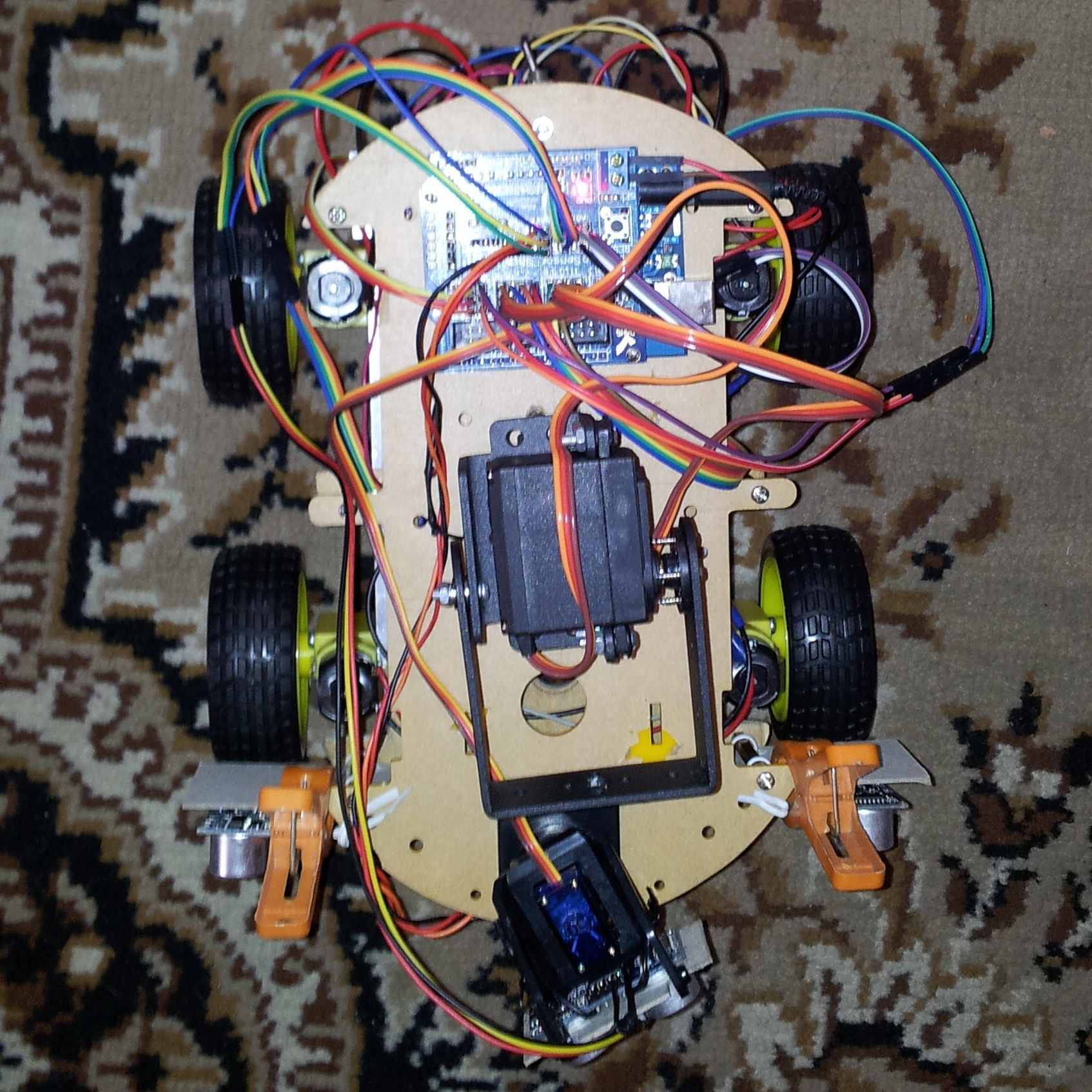
По пластинам надо сказать отдельно, когда начал собирать оказалось что одна пластина вырезана криво со смещением и ко второй не подходит. По видимому китаец который ее вырезал был пьян: (Поэтому пришлось самому вырезать новую из фанеры.1 x L298N драйвер моторов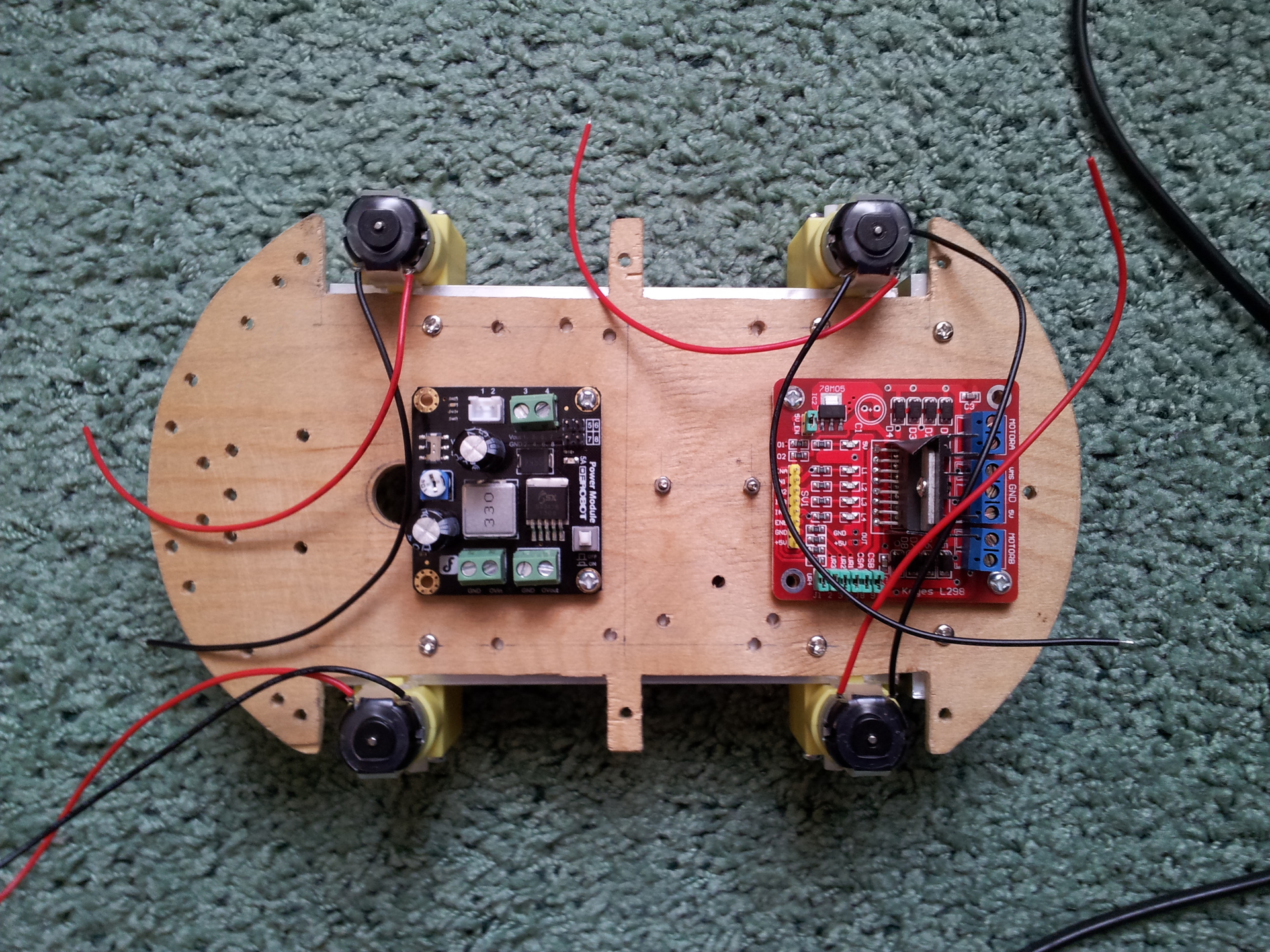 на фото он справа1 x Arduino UNO1 x Sensor board V5 — второй этаж на arduino для подключения переферии датчиков, серв без паяния и макетной платы.1 x Держатель для аккумуляторов1 x Микро серва1 x Ultrasonic — ультразвуковой дальномер3 x Датчик линии1 x Инфракрасный приёмник1 x Пульт управления2×18650 аккумуляторы (в комплекте были некачественные аккумуляторы практически сразу один подумер)1×18650 зарядка для аккумуляторов1 x Bluetooth модуль1 x USB кабель 50 см30 x провода15 x Столпы (6×35mm / 3×20mm / 6×6mm)Все необходимые винты и гайки
на фото он справа1 x Arduino UNO1 x Sensor board V5 — второй этаж на arduino для подключения переферии датчиков, серв без паяния и макетной платы.1 x Держатель для аккумуляторов1 x Микро серва1 x Ultrasonic — ультразвуковой дальномер3 x Датчик линии1 x Инфракрасный приёмник1 x Пульт управления2×18650 аккумуляторы (в комплекте были некачественные аккумуляторы практически сразу один подумер)1×18650 зарядка для аккумуляторов1 x Bluetooth модуль1 x USB кабель 50 см30 x провода15 x Столпы (6×35mm / 3×20mm / 6×6mm)Все необходимые винты и гайки
По разрозненной информации в интернете удалось его собрать и запрограммировать. В конструкторе используется драйвер двигателя L298N позволяющий питать два канала по 2A и регулировать скорость моторов PWM сигналом. Первая программа собственно и делала только что управляла двигателями. Потом удалось запустить программу с ультразвуковым дальномером, тут всё довольно просто. А вот с управлением с инфракрасного пульта пришлось помучиться. Вообще такое управление нестабильно, работает только в прямой видимости под определенным углом и не всегда срабатывает, поэтому я сразу от него отказался. С блютус управлением разобрался не сразу, но там всё довольно просто. Связь организуется точно также через сериал порт как и по usb –кабелю. Использовал на android телефоне программу Bluettooth SPP очень удобно запрограммировать кнопки как тебе надо и ведет лог что приходит по сериал каналу.
Дальше было много экспериментов и изучение возможностей конструктора и arduino. Резюмируя могу сказать что работает всё довольно просто, запрограммировать можно как угодно, вызывает ездящий по комнате робот бурю эмоций и удовлетворения:) Да и вообще это жутко интересное хобби!
Потом были заказаны сервы с креплениями для манипулятора, инфракрасные датчики расстояния sharp, понижающий стабилизатор напряжения и энкодеры. Постепенно робот превратился в то что вы можете видеть на видео и фото.
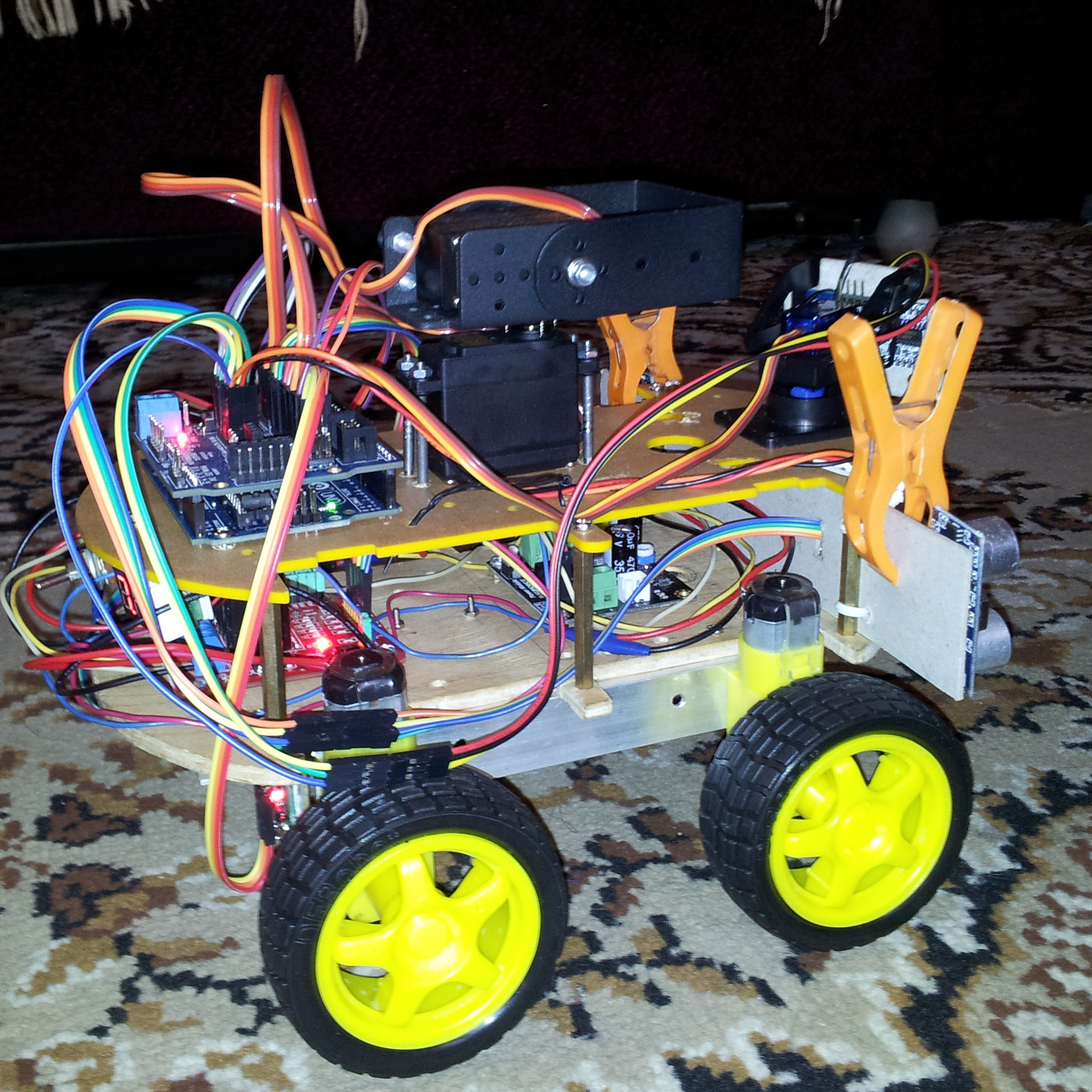
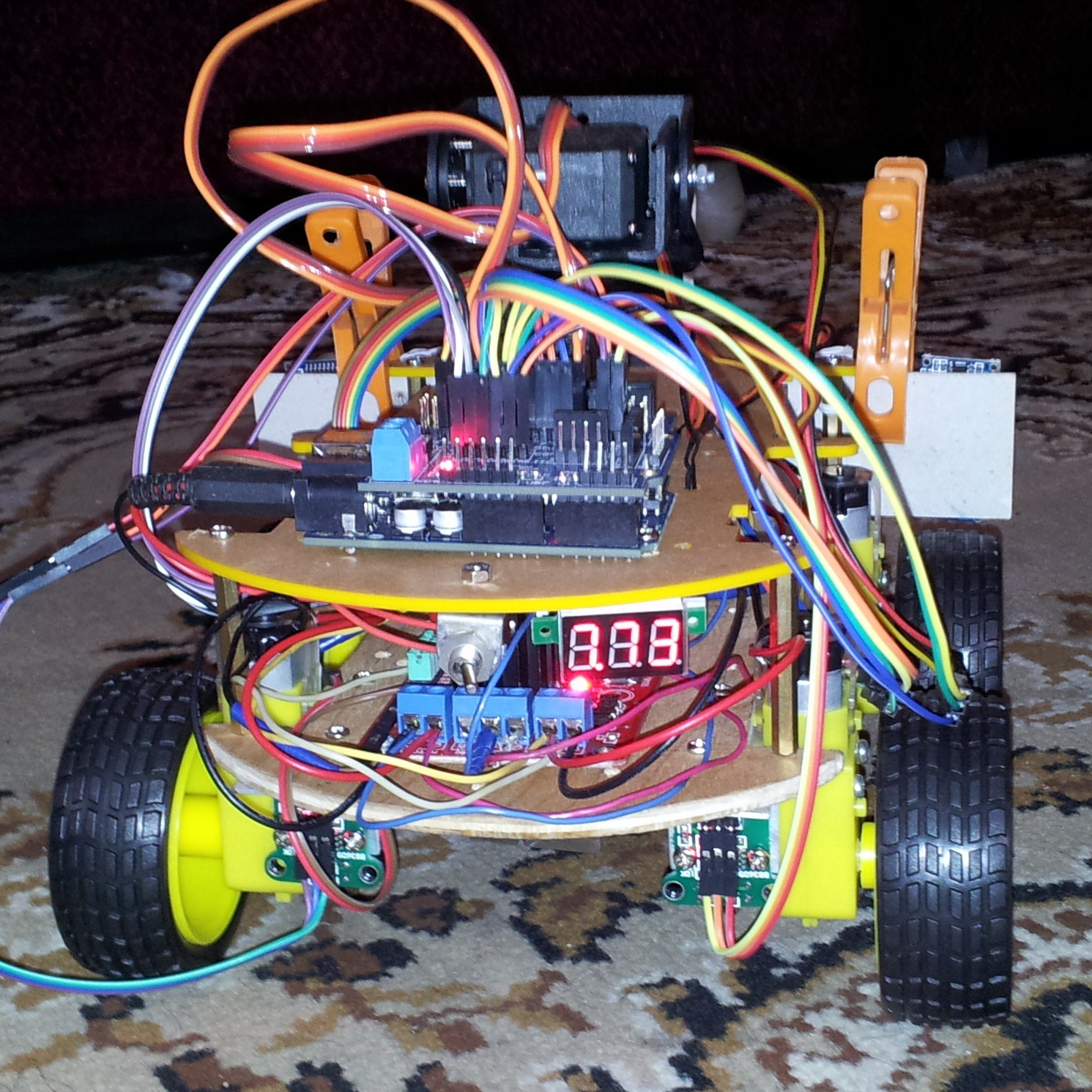
На данный момент робот ездит под управлением с телефона или в автоматическом режиме по дальномерам. Разбираюсь по тихоньку с программированием android, так как планирую перевести туда всю так сказать мозговую деятельность.
Есть также ряд проблем/задач которые пока не удалось решить. В частности для полностью автономного движения оказалось не достаточно ультразвукового и инфракрасного дальномеров, робот всё равно иногда упирается в препятствия. Есть идеи как эту задачу решить, но это потребует кардинальной переделки робота, поэтому пока размышляю.
Планирую сделать опенсоурс проект по конструкции робота и программному обеспечению, сделать уроки как с нуля собрать и запрограммировать робота.
Буду вести регулярно видео блог по совершенствованию робота и писать сюда статьи, так что поддержите меня и пишите в комментариях на какую тему написать следующую статью, снять видео.
PS: Чертежи, размеры, исходники опубликую позже в группе https://vk.com/club23358759
