[Из песочницы] Обработка и oтображение сигналов на частоте преобразования АЦП
Цель работы: Рассмотрение особенностей ввода и отображения широкополосных сигналов.Задача работы: Построение канала ввода, обработки и отображения сигналов на максимальной частоте преобразования АЦП контроллера Arduino.Приборы и принадлежности: Контроллер Arduino UNO, пакет Simulink МатЛАБ (R2012).ВВЕДЕНИЕРазработка программных средств для наблюдения, анализа и обработки сигналов на уровне контроллеров требует значительных временных затрат. Подключение контроллера к специализированной среде высокого уровня (Рис. 1) позволяет значительно сократить время проектирования алгоритма для контроллера с учетом ограничений его ресурсов.Хорошим примером мощной специализированной среды для работы с сигналами является МатЛАБ. Для анализа сигналов зачастую требуется наблюдать его спектр в максимально широкой полосе частот. Для этого контроллер должен принимать сигналы на максимальной частоте преобразования АЦП.
Построение рабочего канала «Arduino UNO — МатЛАБ» для наблюдения и обработки сигналов в реальном времени на предельной частоте преобразования АЦП подробно излагается в этой работе. Особенностью этого канала является то, что такты реального времени задаются не МатЛАБ, а контроллером Arduino. Такое построение не требует компиляции Simulink модели с библиотекой реального времени (rtwin.tlc), что позволяет использовать в модели практически любые блоки библиотеки Simulink.
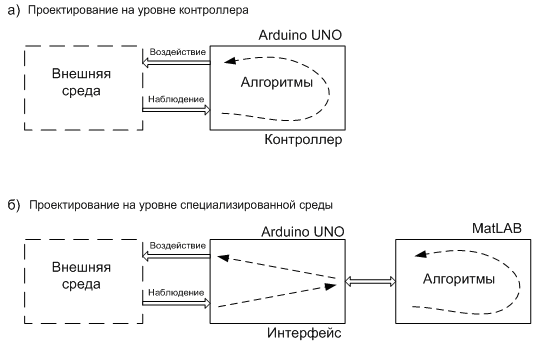 Рис. 1. Сравнение средств разработки алгоритмов. Для проектирование алгоритмов на уровне специализированной среды необходим канал передачи данных между контроллером и средой проектирования.
Рис. 1. Сравнение средств разработки алгоритмов. Для проектирование алгоритмов на уровне специализированной среды необходим канал передачи данных между контроллером и средой проектирования.
ОБЩИЕ СВЕДЕНИЯ Средства накопления, анализа, обработки и отображения сигналовВ этой работе используется среда Simulink для приёма и отображения данных контроллера Arduino.Simulink — это интерактивная среда и язык программирования для имитационного моделирования, позволяющая при помощи блок-диаграмм строить динамические модели процессов. Simulink интегрирована в среду MatLAB. Интеграция позволяет использовать уже готовые библиотеки блоков, встроенные математические алгоритмы, мощные средства обработки и графического отображения данных для решения всего спектра задач от разработки концепции модели до тестирования, проверки, генерации кода и аппаратной реализации.
Состав пакетов расширения библиотеки Simulink на примере пакета цифровой обработки сигнала «DSP System Toolbox» показан на Рис. 2.
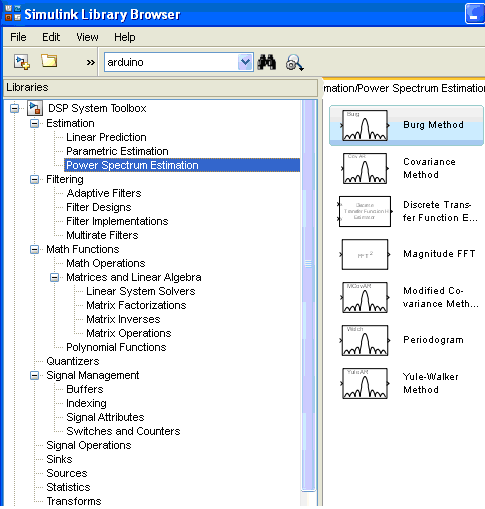 Рис. 2. Пример дополнительного пакета расширения Simulink для моделирования систем обработки сигналов: DSP System Toolbox [1]. В пакете используются новейшие алгоритмы спектрального анализа. Выделено содержимое раздела Power Spectrum Estimation — блоки для спектральной оценки сигнала.
Рис. 2. Пример дополнительного пакета расширения Simulink для моделирования систем обработки сигналов: DSP System Toolbox [1]. В пакете используются новейшие алгоритмы спектрального анализа. Выделено содержимое раздела Power Spectrum Estimation — блоки для спектральной оценки сигнала.
Потоковая передача данныхИспользование двух буферов для накопления и передачи данных позволяет организовать без разрывов сбор, обработку и визуализацию данных (для избежания потери данных скорость последующего процесса должна быть не ниже скорости предыдущего процесса).
Примером применения такой организации может быть модуль E14–440 [2] для многоканального ввода, вывода и обработки аналоговой и цифровой информации, подключаемый к компьютеру через шину USB.
Входные данные сначала заносятся в первую половинку FIFO буфера АЦП. После ее заполнения данные начинают передаваться в PC, в тоже время не прекращается сбор данных во вторую половинку FIFO буфера. После накопления данных во второй половинке FIFO буфера опять начинается передача данных в PC и параллельно продолжается сбор данных уже в первую половинку.
ПОСТРОЕНИЕ ОСЦИЛЛОГРАФА НА БАЗЕ КОНТРОЛЛЕРА ARDUINO
Максимальная скорость накопления данных АЦПИспользуя вывод результата на монитор редактора Arduino на максимальной частоте (57600 бит/с) напишем программу подсчета преобразований АЦП за фиксированный период.
Программа измерения скорости преобразования АЦП:
const int adc_5 = A5; // ADC port numberunsigned long time_start; // Start of capturing, msunsigned long time_end; // End of capturing, ms
void setup () {Serial.begin (57600); // 9600, 19200, 38400, 57600 and 115200 bit/s}
void loop (){time_start = millis (); for (int i = 0; i < 1024; i++) {int val = analogRead(adc_5);}time_end = millis();int period = time_end — time_start;Serial.println(period);
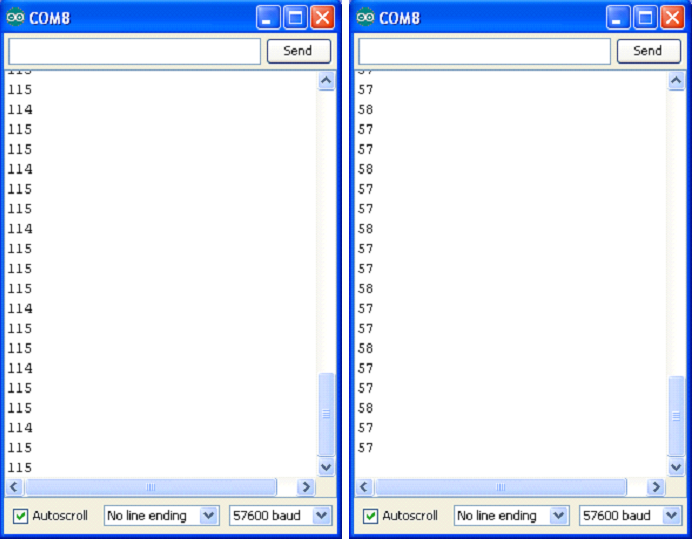 Рис. 3. Время (в мсек) 1024 и 512 преобразований АЦП. Среднее время преобразования АЦП: 0.1123 мс (как 115/1024).
Рис. 3. Время (в мсек) 1024 и 512 преобразований АЦП. Среднее время преобразования АЦП: 0.1123 мс (как 115/1024).
Время масштабирования данных АЦПДля перевода 10 разрядных данных АЦП в 8 разрядные используется функцияmap (val, 0, 1023, 0, 255); где val — int переменная c 10 значимыми разрядами.Программа измерения времени преобразования АЦП с масштабированием и записи в массив:
const int adc_5 = A5; // ADC port numberunsigned long time_start; // Start of capturing, msunsigned long time_end; // End of capturing, msbyte adc_bytes[1024]; // Buffer for ADC data
void setup () {Serial.begin (57600); // bit/s}
void loop (){time_start = millis (); for (int i = 0; i < 1024; i++) {int val = analogRead(adc_5);adc_bytes[i] = map(val, 0, 1023, 0, 255);}time_end = millis();int period = time_end — time_start;Serial.println(period);}
 Рис. 4. Время (в мсек) 1024 преобразований АЦП, перевода 10 р. данных в 8 разрядные и запись в массив. Период АЦП преобразования с масштабированием: 0.1611 мс (как 165/1024).
Рис. 4. Время (в мсек) 1024 преобразований АЦП, перевода 10 р. данных в 8 разрядные и запись в массив. Период АЦП преобразования с масштабированием: 0.1611 мс (как 165/1024).
Поскольку время преобразования АЦП 0.13 мс, то один перевод 10 разрядных данных в байтовый формат (масштабирование) составляет 0.0424 мс.
Скорость канала последовательной передачи данныхДля определения скорости побайтовой передачи в последовательный канал в цикле передается код символа Serial.write (1) который не отображается на мониторе.
Основной блок программы определения скорости передачи:
void loop (){ //Do stuff hereunsigned long time = millis (); Serial.write (1); rate = rate + 1; if (time > set_time) {set_time = set_time + 30; // 30 ms RT clockSerial.println (rate); rate = 0;}}
 Рис. 5. Тестовые данные: количество переданных байт в последовательный канал за 30 мс на скорости 57600 бит/с.Тест показал, что передача 173 байт занимает 30 мс, с другой стороны за 30 мс на скорости 57600 бит/с можно передать 1728 бит. Следовательно, на передачу одного байта расходуется время передачи 10 бит. Используя это отношение для режима передачи• Data bits: 8• Parity: none• Stop bits: 1• Flow control: noneможно подсчитать время потоковой передачи массива данных на разных скоростях.Передача, например, 256 байт на скорости 9600 бод (бит/c) занимает 267 мс, на скорости 57600 бод — 44 мс; и на скорости 115200 бод — 22 мс (как 256×10/115200).
Рис. 5. Тестовые данные: количество переданных байт в последовательный канал за 30 мс на скорости 57600 бит/с.Тест показал, что передача 173 байт занимает 30 мс, с другой стороны за 30 мс на скорости 57600 бит/с можно передать 1728 бит. Следовательно, на передачу одного байта расходуется время передачи 10 бит. Используя это отношение для режима передачи• Data bits: 8• Parity: none• Stop bits: 1• Flow control: noneможно подсчитать время потоковой передачи массива данных на разных скоростях.Передача, например, 256 байт на скорости 9600 бод (бит/c) занимает 267 мс, на скорости 57600 бод — 44 мс; и на скорости 115200 бод — 22 мс (как 256×10/115200).
Размер массива для накопления и передачи данныхРазмер оперативной (SRAM) памяти Arduino UNO составляет 2 Кбайт. Тестирование программы циклического считывания АЦП, масштабирования 10 разрядных данных до 8 разрядных, тактирования и побайтной передачи данных показало, что максимальный размер массива для накопления и отправки данных не должен превышать 1800 байт.
Более сложные программы могут потребовать и большей дополнительной памяти SRAM. Поэтому массив для накопления и передачи данных АЦП ограничен 1024 байтами или 512 словами.
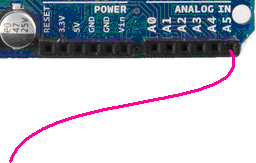 Рис. 6. Кусок провода, подсоединенный к аналоговому входу А5 контроллера Arduino для усиления наблюдаемой наводки сети 50 Гц.
Рис. 6. Кусок провода, подсоединенный к аналоговому входу А5 контроллера Arduino для усиления наблюдаемой наводки сети 50 Гц.
Таблица 1. Времена операций программы с учетом нестабильности циклов
Пример настройки канала отображения 256 масштабированных значений АЦП при максимальной скорости накопления и передачи данных.Код программы контроллера Arduino: const int adc_5 = A5; // ADC port numberunsigned long set_time; // Time of next clockbyte adc_bytes[256]; // Buffer for scaled ADC data
void setup () {Serial.begin (115200); // bit/s}
void loop (){unsigned long time = millis (); // Current time in ms
// ADC data capturingfor (int i = 0; i < 256; i++) {int val = analogRead(adc_5);adc_bytes[i] = map(val, 0, 1023, 0, 255);}
// send ADC data into serial portSerial.print («A»); // «A» is headerfor (int i = 0; i < 256; i++) {Serial.write(adc_bytes[i]);}
if (time > set_time) {set_time = set_time + 70; // RT clock is 70 ms}}
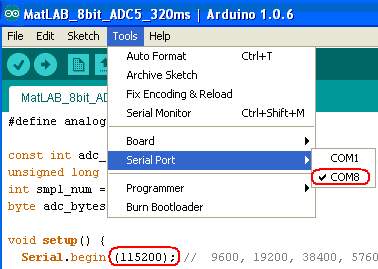 Рис. 7. Определение номера порта, а среде Arduino.
Рис. 7. Определение номера порта, а среде Arduino.
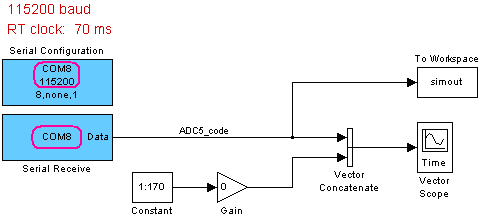 Рис. 8. Simulink модель для приёма АЦП данных контроллера, масштабирования вектора данных по времени, отображения данных в реальном времени и сохранения потока данных в памяти workspace.
Рис. 8. Simulink модель для приёма АЦП данных контроллера, масштабирования вектора данных по времени, отображения данных в реальном времени и сохранения потока данных в памяти workspace.
 Рис. 9. Параметры COM порта в среде Simulink (блок модели: Serial Configuration)
Рис. 9. Параметры COM порта в среде Simulink (блок модели: Serial Configuration)
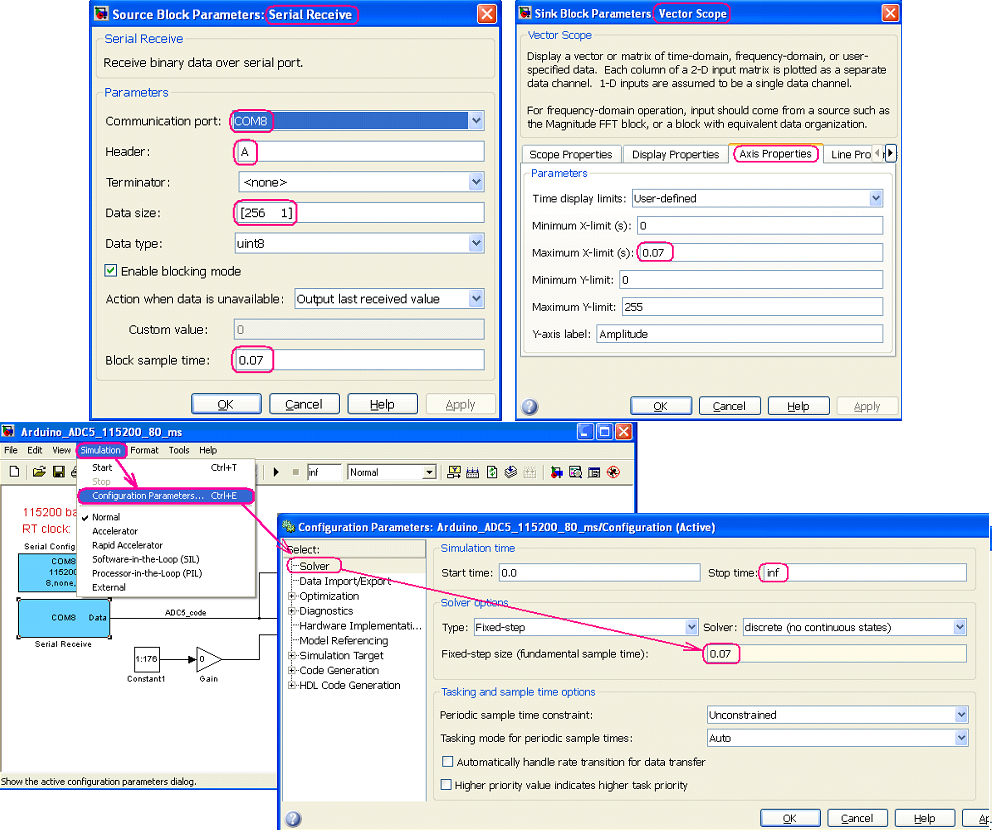 Рис. 10. Параметры блоков Simulink модели и режима моделирования.
Рис. 10. Параметры блоков Simulink модели и режима моделирования.
Модель запускается нажатием на кнопку Start simulation:  Рис. 11. Кнопка запуска модели.
Рис. 11. Кнопка запуска модели.
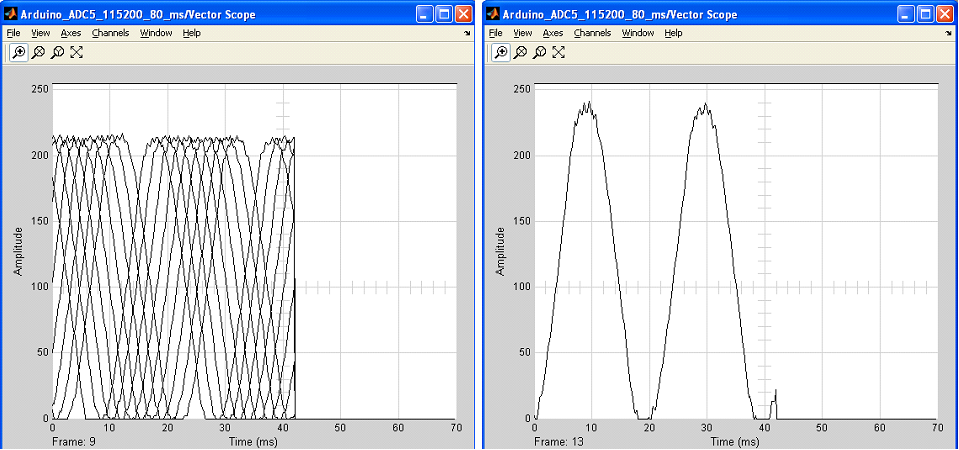 Рис. 12. Вид сетевой наводки (подключение показано на Рис. 6) с наложением кадров (левое окно) и в отдельном кадре (правое окно). Причина смещения сигнала при наложении кадров — отсутствие синхронизации отображения. Примечание: Simulink имеет достаточно средств для построения канала синхронизации.
Рис. 12. Вид сетевой наводки (подключение показано на Рис. 6) с наложением кадров (левое окно) и в отдельном кадре (правое окно). Причина смещения сигнала при наложении кадров — отсутствие синхронизации отображения. Примечание: Simulink имеет достаточно средств для построения канала синхронизации.
ПРИМЕРЫ ПОЛУЧЕНИЯ ПРОВЕРЕННЫХ РЕЗУЛЬТАТОВ И ВАРИАНТЫ ДЛЯ САМОКОНТРОЛЯ Задание 1. Накопление, передача и отображение отмасштабированных данных (см. пример и таблицу времён на стр. 8).1. Напишите для контроллера Arduino UNO программу циклического считывания показаний АЦП, масштабирования, записи данных в массив 1024 байт и передачи массива в последовательный канал. Программа должна выполняться с максимальной скоростью. Символ A — заголовок передаваемого массива.Пример программы:
const int adc_5 = A5; // ADC port numberunsigned long set_time; // Time of next clockbyte adc_bytes[1024]; // Buffer for ADC data
void setup () {Serial.begin (115200); // bit/s}
void loop (){unsigned long time = millis (); // Current time in ms
// ADC data capturingfor (int i = 0; i < 1024; i++) {int val = analogRead(adc_5);adc_bytes[i] = map(val, 0, 1023, 0, 255);}
// send ADC data into serial portSerial.print («A»); // «A» is headerfor (int i = 0; i < 1024; i++) {Serial.write(adc_bytes[i]);}
if (time > set_time) {set_time = set_time + 270; // RT clock is 270 ms}}
2. В среде МатЛАБ составьте программу из Simulink блоков для приема и отображения данных контроллера в реальном времени. Скорость, размер пакета, период принимаемых данных и такт работы модели должны соответствовать соответствующим параметрам контроллера. Отмасштабируйте время отображаемых данных.
 Рис. 13. Simulink модель для приема данных на максимальной частоте: 115200 бод. Объединение векторов (Vector Concatenate) используется для масштабирования сигнала по шкале времени кадра (frame).
Рис. 13. Simulink модель для приема данных на максимальной частоте: 115200 бод. Объединение векторов (Vector Concatenate) используется для масштабирования сигнала по шкале времени кадра (frame).
3. Проверьте качество канала «Вход АЦП — дисплей МатЛАБ», например по периоду сетевой 50 Гц наводки на входе АЦП. Для увеличения амплитуды наводки ко входу АЦП подсоедините кусок провода (см. Рис. 6). Амплитуда наводки зависит от расстояния между проводом и вашей рукой.
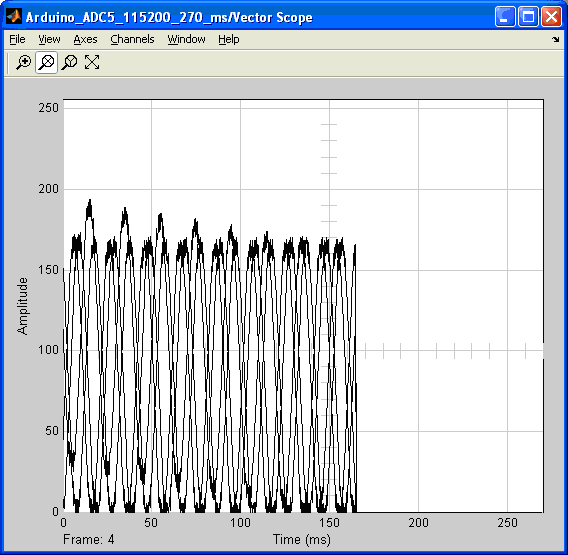 Рис. 14. Наложение 4 кадров при сканировании частоты 50Гц на входе АЦП контроллера Arduino.
Рис. 14. Наложение 4 кадров при сканировании частоты 50Гц на входе АЦП контроллера Arduino.
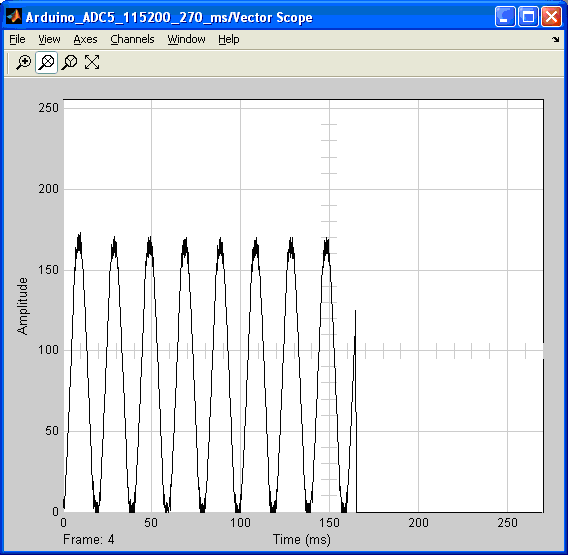 Рис. 15. Частота сети на входе АЦП контроллера, 4 кадр.
Рис. 15. Частота сети на входе АЦП контроллера, 4 кадр.
Задание 2. Накопление, передача и отображение 10 разрядных данных АЦП.1. Для контроллера Arduino UNO напишите программу циклического считывания показаний АЦП, записи данных в массив 512 слов и побайтной передачи данных массива в последовательный канал. Программа должна выполняться с максимальной скоростью.
Пример программы:
const int adc_5 = A5; // ADC port numberunsigned long set_time; // Time of next clock in msword adc_int[512]; // Buffer for ADC dataint val; byte val_Lo, val_Hi;
void setup () {Serial.begin (115200); // bit/s}
void loop (){unsigned long time = millis ();
// ADC data capturingfor (int i = 0; i < 512; i++) {adc_int[i] = analogRead(adc_5);}
// send ADC data into serial port// first low bytes then high bytesSerial.print («A»); // «A» is headerfor (int i = 0; i < 512; i++) {val = adc_int[i];val_Lo = (val << 1) & 0xFE;Serial.write(val_Lo); // Lo byte}for (int i = 0; i < 512; i++) {val = adc_int[i];val_Hi = (val >> 6) & 0xE; Serial.write (val_Hi); // Hi byte}
if (time > set_time) {set_time = set_time + 160; // RT clock is 160 ms}}
2. Составьте программу Simulink для приема восстановления и отображения АЦП данных контроллера. Скорость, размер пакета и период принимаемых данных должны соответствовать соответствующим параметрам контроллера. Отмасштабируйте время отображаемых данных.
 Рис. 16. Программа Simulink для приёма, восстановления и отображения массива данных АЦП контроллера Arduino UNO.3. Запишите сетевые 50 Гц наводки.
Рис. 16. Программа Simulink для приёма, восстановления и отображения массива данных АЦП контроллера Arduino UNO.3. Запишите сетевые 50 Гц наводки.
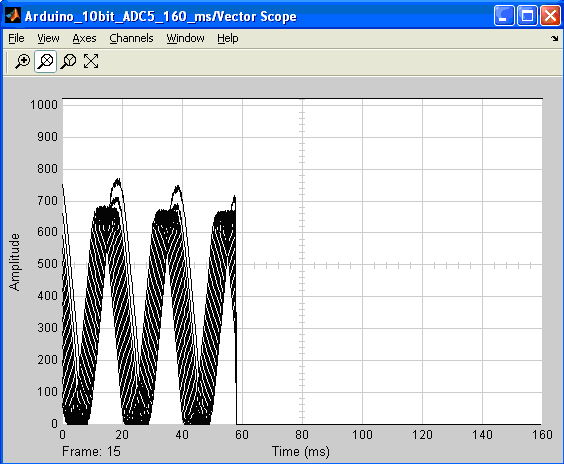 Рис. 17. Наложение 15 кадров при сканировании сетевой наводки 50Гц на входе АЦП контроллера. Период программы: 160 мс. Время заполнения массива данными АЦП: 58 мс. Время передачи 512×2 байт на частоте 115200 бод: 89 мс.
Рис. 17. Наложение 15 кадров при сканировании сетевой наводки 50Гц на входе АЦП контроллера. Период программы: 160 мс. Время заполнения массива данными АЦП: 58 мс. Время передачи 512×2 байт на частоте 115200 бод: 89 мс.
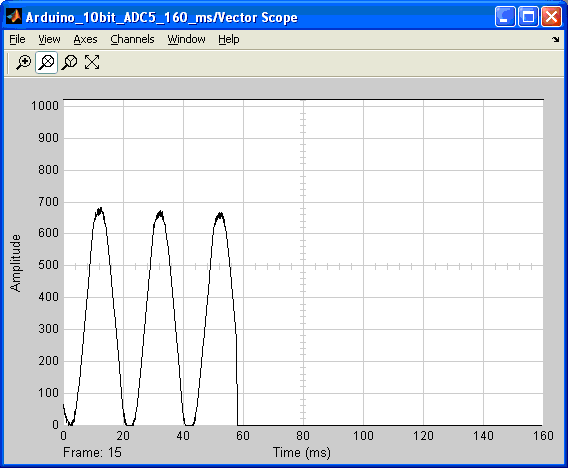 Рис. 18. Последний 15 кадр. Время 3.5 циклов 50 Гц сигнала: 70 мс.
Рис. 18. Последний 15 кадр. Время 3.5 циклов 50 Гц сигнала: 70 мс.
Задание 3. Обработка сигнала m-программой МатЛАБ1. Сохраните отображаемые в реальном времени данные в workspace памяти МатЛАБ, например, при помощи блока simout (см. Рис. 13).2. Скопируйте сохраненные данные в рабочий каталог, например: save ('simout_50Hz','simout');3. Разработайте m-программу МатЛАБ для отображения архивного АЦП сигнала контроллера.
Пример кода:
clear allload ('simout_50Hz');
d_frame = simout.Time (2)-simout.Time (1); size_frame = size (simout.Data,1); sampling = d_frame/(size_frame + 163×4); % dtdata_size = size (simout.Data,1)*size (simout.Data,2)*size (simout.Data,3);
% time = (0: data_size-1)*sampling; time = []; for i = 1: length (simout.Time)time = [time (0:1023)*sampling+simout.Time (i)]; end
adc = uint8([]); for i = 1: size (simout.Data,3)adc = [adc simout.Data (:,:, i)']; end
% frame_num = length (simout.Time) % or size (adc,3) % is 54 frame
if 1%figureplot (time, adc, 'b')grid onxlabel ('Time, s'); ylabel ('ADC [0… 255], bit'); title ('8 bit ADC frame against Time'); end
 Рис. 19. Покадровое изменение 50 Гц наводки на входе АЦП контроллера Arduino UNO: 24 кадра по 0.27 сек.
Рис. 19. Покадровое изменение 50 Гц наводки на входе АЦП контроллера Arduino UNO: 24 кадра по 0.27 сек.
4. Разработайте m-программу для вычисления параметров сигнала, например, периода в заданном кадре.
Пример кода:
clear allload ('simout_50Hz');
d_frame = simout.Time (2)-simout.Time (1); sampling = d_frame/((256 + 176)*4); % dtdata_size = size (simout.Data,1)*size (simout.Data,2)*size (simout.Data,3); % <256 x 1 x 54>
%FRAME numberi = 5; time = (0:1023)*sampling+simout.Time (i); adc = simout.Data (:,:, i)'; if 1%figureplot (time, adc, 'b')grid onxlabel ('Time, s'); ylabel ('ADC [0… 255], bit'); title ('8 bit ADC frame against Time'); end% periodcomp_level = 60; j = 1; for i = 2: length (adc)if (adc (i) >= comp_level) && (adc (i-1) < comp_level)cell_num(j) = i;j = j + 1;endends_period = diff(time(cell_num));
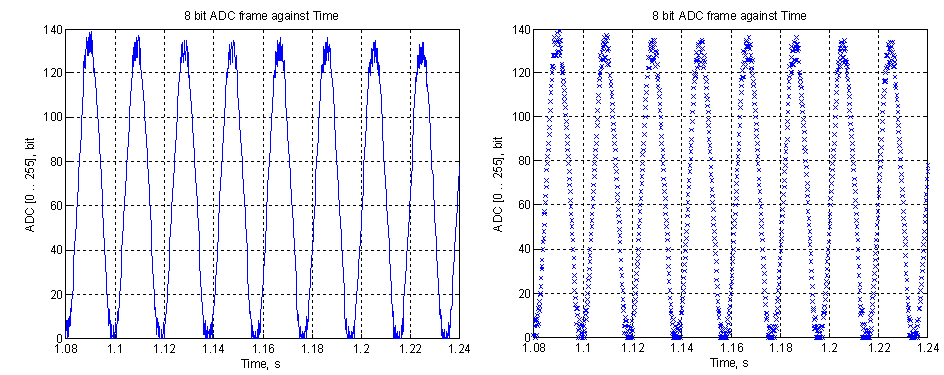 Рис. 20. Непрерывное и поточечное изменение сигнала в выбранном кадре. Время 5 кадра: 1.08… 1.24 сек. Размер вектора: 1024 байт. Следовательно время одного считывания и масштабирования сигнала АЦП: 0.156 мс.
Рис. 20. Непрерывное и поточечное изменение сигнала в выбранном кадре. Время 5 кадра: 1.08… 1.24 сек. Размер вектора: 1024 байт. Следовательно время одного считывания и масштабирования сигнала АЦП: 0.156 мс.
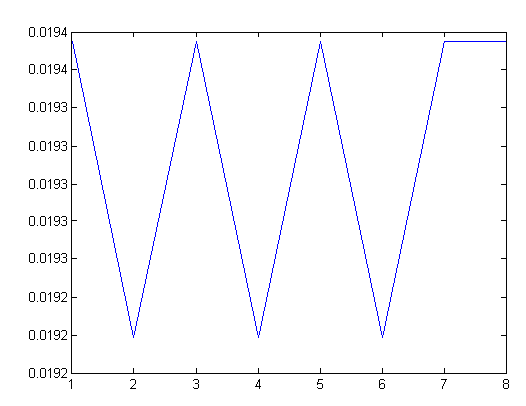 Рис. 21. Период наводки сети 5 кадра: 19.2… 19.4 мсек.
Рис. 21. Период наводки сети 5 кадра: 19.2… 19.4 мсек.
Задание 4. Построение спектра сигнала в реальном времени.1. Для наблюдения частотного спектра сигнала подключите к отображаемому сигналу модели блок быстрого преобразования Фурье (Spectrum Scope: FFT) из раздела библиотеки Simulink > DSP System Toolbox > Sinks.
 Рис. 22. Модель со спектроскопом.
Рис. 22. Модель со спектроскопом.
 Рис. 23. Спектр сетевой наводки. Сигнал кадра включает 1024 амплитуды и 163×4 нулевых значений.
Рис. 23. Спектр сетевой наводки. Сигнал кадра включает 1024 амплитуды и 163×4 нулевых значений.
2. Выделите основную гармонику сигнала: 50 Гц.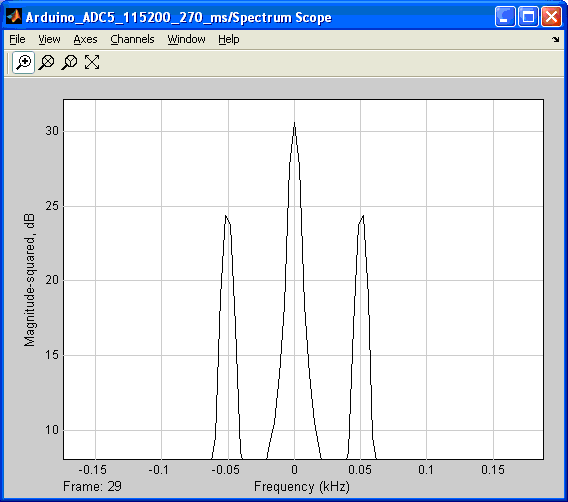 Рис. 24. Гармоника сигнала на частоте 50 Гц.
Рис. 24. Гармоника сигнала на частоте 50 Гц.
3. Подключите блок Spectrum Scope: FFT к неотмасштабированному (по времени) сигналу. Рис. 25. Перенос точки подключения спектрографа. На входе неотмасштабированный сигнал с меньшей зоной нулевых значений в конце массива (вектора).
Рис. 25. Перенос точки подключения спектрографа. На входе неотмасштабированный сигнал с меньшей зоной нулевых значений в конце массива (вектора).
4. Настройте блок. Выберите тип отображаемого спектра: Spectrum Type.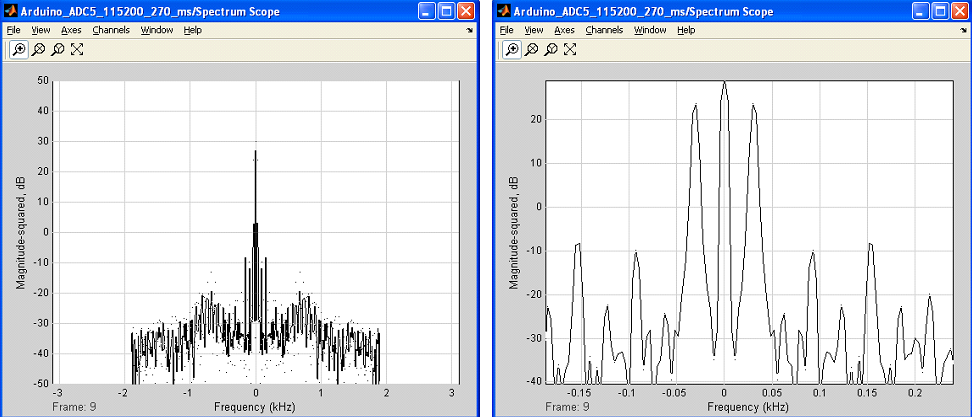 Рис. 26. Параметры спектрометра неотмасштабированного сигнала из 1024 амплитуд.
Рис. 26. Параметры спектрометра неотмасштабированного сигнала из 1024 амплитуд.
Задание 5. Построение канала скоростной потоковой передачи и обработки 8р данных в реальном времени без пропуска данных.1. Напишите для контроллера Arduino UNO программу циклического считывания показаний АЦП, масштабирования и передачи в последовательный канал 2048 байт с заголовком. Программа должна считывать показания АЦП на постоянной частоте без перерывов.
Пример программы: const int adc_5 = A5; // ADC port number
void setup () {Serial.begin (115200); // bit/s}
void loop (){for (int i = 0; i < 2048; i++) {if (i == 0) Serial.print(«A "); // "A» is headerint val = analogRead(adc_5);byte adc_byte = map(val, 0, 1023, 0, 255);Serial.write(adc_byte);}}
2. Настройте модель Simulink (МатЛАБ) на прием данных контроллера.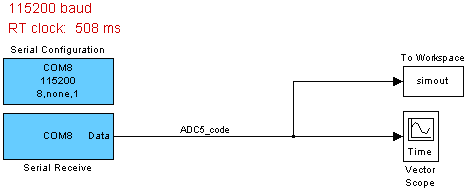 Рис. 27. Пример модели для отображения непрерывного потока данных. Кадр содержит 2048 байт.
Рис. 27. Пример модели для отображения непрерывного потока данных. Кадр содержит 2048 байт.
3. Настройте время моделирования модели (Меню > Simulation > Configuration Parameters > Solver > Fixed-step size) и такт блока Serial Receive > Block Sample Time, (см. Рис. 10) по периоду 50 Гц сети.Расчетное время кадра по данным Таблица 1: 254 мс (для 1024 байт) => 508 мс для 2048 байт, В действительности, время кадра программы (в которой считывание АЦП и передача выполняются поочередно) составляет 375 мс.
 Рис. 28. Кадр графопостроителя Vector Scope. В кадре 18.75 периодов 50 Гц волны. Следовательно, время кадра должно быть 375 мс, а период преобразования АЦП, масштабирования и передачи данных: 0.1831 мс.
Рис. 28. Кадр графопостроителя Vector Scope. В кадре 18.75 периодов 50 Гц волны. Следовательно, время кадра должно быть 375 мс, а период преобразования АЦП, масштабирования и передачи данных: 0.1831 мс.
4. В командном окне МатЛАБ наберите команду формирования 5 кадрового сигнала.sgnl = [simout.Data (:,1,1)' simout.Data (:,1,2)' simout.Data (:,1,3)' simout.Data (:,1,4)' simout.Data (:,1,5)'];
5. Постройте график 5 первых кадров сигнала.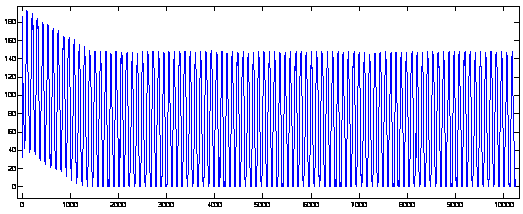 Рис. 29. Пять кадров входного сигнала модели.
Рис. 29. Пять кадров входного сигнала модели.
6. Рассмотрите качество стыков кадров. Рис. 30. Стыки пяти кадров. Имеются заметные искажения в первом байте каждого кадра. Заменой первых байт средними значениями между ближайшими точками можно существенно снизить искажения.
Рис. 30. Стыки пяти кадров. Имеются заметные искажения в первом байте каждого кадра. Заменой первых байт средними значениями между ближайшими точками можно существенно снизить искажения.
7. Подключите ко входному сигналу модели анализатор спектра. Наблюдайте спектр сигнала в реальном времени. Рис. 31. Модель отображения спектра входного сигнала (АЦП Arduino UNO) в реальном времени.
Рис. 31. Модель отображения спектра входного сигнала (АЦП Arduino UNO) в реальном времени.
 Рис. 32. Спектр сетевой наводки на входе АЦП контроллера Arduino.
Рис. 32. Спектр сетевой наводки на входе АЦП контроллера Arduino.
8. Подключите ко входному сигналу модели осциллограф Time Scope из библиотеки Simulink > DSP System Toolbox > Sinks.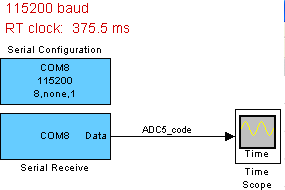 Рис. 33. Осциллограф в модели для отображения входного сигнала контроллера Arduino.
Рис. 33. Осциллограф в модели для отображения входного сигнала контроллера Arduino.
9. Настройте осциллограф на отображение содержимого текущего кадра и частоты сигнала. Рис. 34. Настройка осциллографа Time Scope > Menu > View > Properties.
Рис. 34. Настройка осциллографа Time Scope > Menu > View > Properties.
10. Запустите модель и наблюдайте стабильность сигнальных параметров. Рис. 35. Отображение сигнала и его параметров в реальном времени на осциллографе Simulink модели.
Рис. 35. Отображение сигнала и его параметров в реальном времени на осциллографе Simulink модели.
Последний вариант канала контроллер Arduino — МатЛАБ в сравнении с предыдущими вариантами имеет следующие преимущества.• не используется память контроллера для накопления АЦП данных; • обеспечивается малый такт преобразования АЦП с масштабированием, который чуть больше такта преобразования АЦП с масштабированием при отсутствии передачи; • не требуется масштабирование сигнала по времени в Simulink модели; • модель содержит меньше блоков; • практически не ограничен размер вектора и время кадра.
КОНТРОЛЬНЫЕ ВОПРОСЫ 1. Сравните периоды преобразования АЦП первого и последнего заданий.2. Почему для построения спектра сигнала рекомендуется брать выборку размером кратную двум?3. Какова задержка потоковой передачи 1024 байт на частоте 115200 бит/c при следующих параметрах передачи? • Data bits: 8• Parity: none• Stop bits: 1• Flow control: noneБИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. DSP System Toolbox. matlab.ru/datasheets/Dsp-system-toolbox-Ru.pdf2. Dr. Bob Davidov. Система термостатирования на базе USB интерфейса Lcard E14–440 (S-function) portalnp.ru/2013/09/10363. Dr. Bob Davidov. Компьютерные технологии управления в технических системах portalnp.ru/author/bobdavidov.
